前言
之前一直吐槽第十四届省赛已经赶上国赛水平了,现在我感觉我错了,还是国赛更难一些。但是也不排除,今年省赛会出前几年国赛考过的知识点,这里还是多给大家分享一些。重复分享某一个知识点的话,确实有些繁琐,所以这里分享十三届决赛代码的同时,更多的还是分享一些前边没有提到的知识点,给出我的处理方法供大家参考,以应对赛场上的各种突发情况。
另外今年的赛点的资料好像已经发了,回头我会在比对一下跟去年的有没有区别,考虑是近两年底层驱动才不给.h文件的,后续我也会分享一下.h文件应该怎么写,底层的.c文件应该怎么修改(前边每一篇文章底层的.c 都是我自己修改过后的,.h文件都是我自己写的)
一、决赛题目
1.比赛题目






2.题目解读
首先,可能会很让人头大的一个点就是,这里不仅仅需要读取超声波,还要读取NE555,这两个就要各占一个定时器资源,以我们之前写的代码来看,定时器资源是不够的。
其次,这里用到的AD和DA,而AD和DA都是通过PCF8591来控制的,之前从来没有遇到过同时控制两路PCF8591的情况。
再次这个题目还要求输出PWM,这个对有单片机基础的人来说不是什么难事,但是要是你根本不知道PWM是什么,那省赛的时候,你绝对难受的要死。
当然,省赛的话绝对不会这么复杂,但也不排除考国赛的某个知识点的可能。下边都会一一介绍
二、功能实现
1.关于定时器资源
1)超声波和NE555需要的定时器资源
之前我们已经介绍过如何读取超声波和NE555了。之前写的代码都是定时器0来完成扫描数码管等其他主要的工作,定时器1用来为超声波计数,或者使用定时器1的外部中断来读取NE555.你如果要问用定时器1同时来为超声波计数和读取NE555可以不可以,那当然不可以,一个需要定时器工作在计时模式,一个需要定时器工作在计数模式,这样使用肯定冲突。
所以他俩每个都需要独占一个定时器资源,我们需要把定时器0分给超声波,用来给超声波计时,定时器1的外部中断模式用于读取NE555.
那数码管还有其他计时工作怎么办呢?其实STC15F2系列单片机还有一个定时器2可以使用
2)定时器2
跟常规的定时器一样,我们可以直接在STC-ISP生成定时器2的初始化函数。
如果你赛点的stc不是新版的,没有使能定时器中断的选项,那你可得提前记一下了,定时器0使能中断使用的是ET0=1;定时器1是ET1 =1;定时器2可不是ET2 =1;而是IE2 |= 0x04; 定时器2的中断号是12。完整的代码如下
void Timer2_Isr(void) interrupt 12
{
}void Timer2_Init(void) //1毫秒@12.000MHz
{
AUXR |= 0x04; //定时器时钟1T模式
T2L = 0x20; //设置定时初始值
T2H = 0xD1; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0x04; //使能定时器2中断
}
定时器2的初始化函数跟我们常用的定时器0和1也不太一样,我们也不方便使用定时器2来给超声波计时,所以我一般选择定时器0给超声波计时,定时器2扫描数码管了。
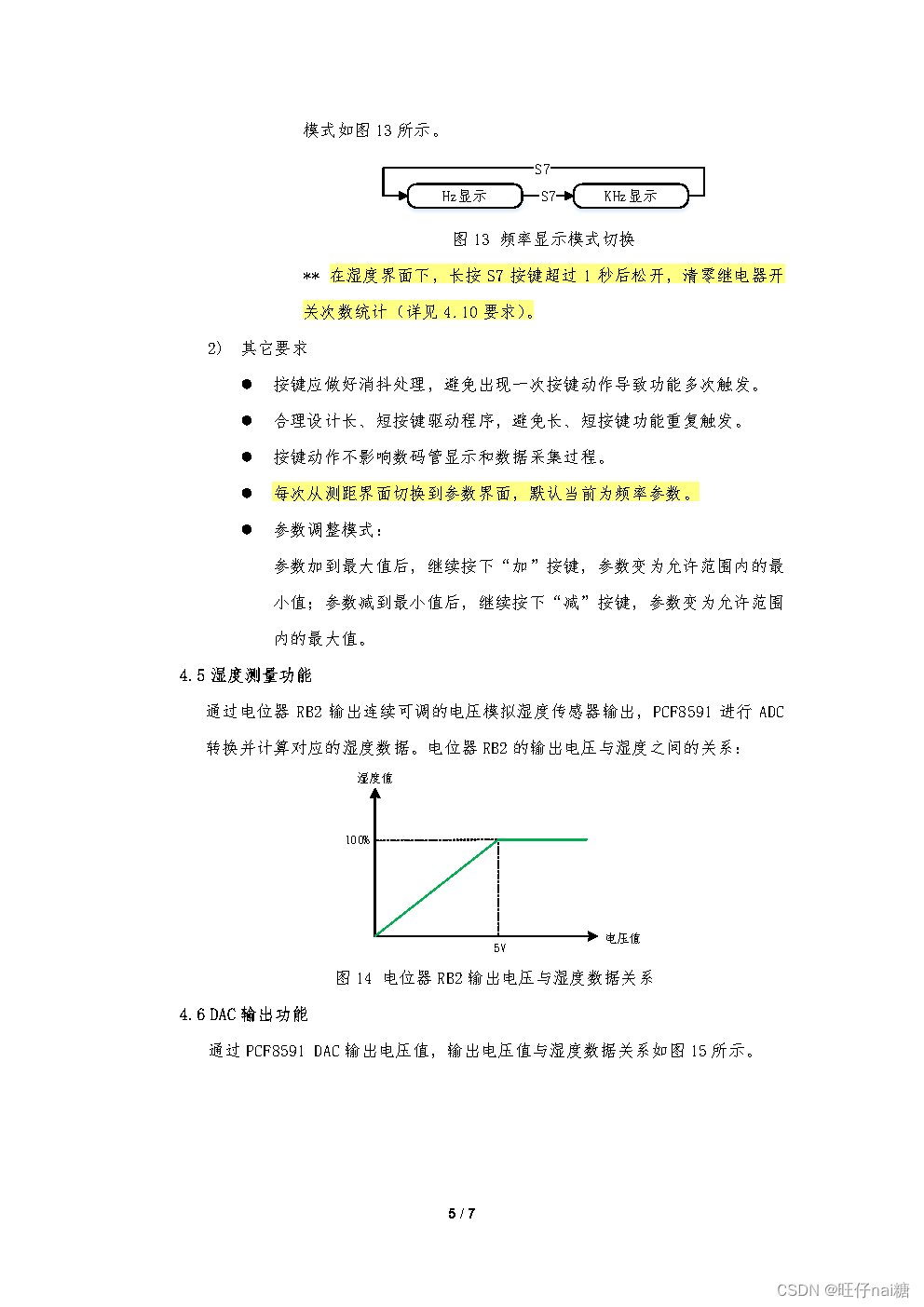
2.单位切换
对于这次的单位切换,我选择采取简单粗暴的方式——把显示不同单位的菜单直接定义成不同的菜单,比如频率界面可以按按键切换单位,我直接定义两个菜单显示不同单位的频率,这样切换单位就变成了切换菜单,简单粗暴。不过这样的话,那就得写7个菜单了,不过还好菜单里面需要显示的东西并不复杂。

3.数据长度不足时,高位熄灭
前几篇文章应该也提到过,这里在简单介绍一下。
定义一个数据为dat,如果它的长度小于3位,也就是dat/1000为0时,那么倒数第三位数码管就熄灭,如果他的长度大于2位,则正常显示dat/100%10;我们可以使用三木运算符来实现,这里以显示菜单1的频率为例:
if(mod==0)//显示频率
{
Nixie_num[0]=21,//F
Nixie_num[1]=20,
Nixie_num[2]=fre/100000>0 ? fre/100000%10 : 20;
Nixie_num[3]=fre/10000>0 ? fre/10000%10 : 20;
Nixie_num[4]=fre/1000>0 ? fre/1000%10 : 20;
Nixie_num[5]=fre/100>0 ? fre/100%10 : 20;
Nixie_num[6]=fre/10>0 ? fre/10%10 : 20;
Nixie_num[7]=fre/1>0 ? fre/1%10 : 20;
}
当然前提是你得知道什么是三目运算符。
4.AD/DA多通道的处理
首先:为什么要处理呢?
答案:如果你不处理的话,如果要读取两个通道的AD值,那可能读取第二个通道的AD值时读取到的还是第一个通道。
当然上边只是对于多通道处理的一种情况哈,总之就是第二个通道可能出现意想不到的结果。老师咋讲的现在我已经忘完了,都具体读和写的哪些情况组合会出现问题,我也记不清了,但是我咱们可以使用一种一劳永逸的办法,那就是连续读取两次,比如我需要读取通道0和3那我就这样写:
unsigned char AD0;unsigned char AD1;
AD0=read_pcf(0);AD0=read_pcf(0);
AD1=read_pcf(1);AD1=read_pcf(1);
如果它还读取不到期望的值的话,那我们就在中间加几个Delay。
5.PWM输出
提到PWM,就得顺带着占空比一块提一下,占空比就是上文提到的duty。
PWM是一种常用的信号控制和转换技术。简单来说,PWM通过调节脉冲信号的宽度来模拟一个连续变化的信号,通常用于控制直流(DC)电动机、LED亮度调节、声音的调节以及其他需要精确控制输入信号的应用。
比如高电平电压为5V,低电平电压为0V,我现在定义PWM为1KHz也就是说一个周期(一个高电平+一个低电平)时1ms,如果定义精度为10%,也就是十分之一个周期。如果一个周期的前50%是高电平,后50%是低电平,这样就记为的50%占空比。刚才又说,高电平为5V,低电平为0V,而一个周期有一半时间是高电平,那么此时输出的电压应该是高电平的一半,也就是5V。对于其他占空比同理。
因此,我们可以通过测量电压,来测量占空比是多少。
题目要求输出1KHz的两种占空比的PWM信号,分别为80%占空比和20%占空比的。

我们当然可以使用一个0.1ms的定时器,定时器计数,前八次输出高电平,后两次输出低电平,这样就可以实现80%占空比输出了,20%也同理。
但是,现在我们的定时器资源急缺,唯一一个用来计时的定时器也设置的1ms,而我又不想修改怎么办呢,我们直接延时其实也可以。输出高电平,延时800us,输出低电平,延时200us,同样也输出了80%占空比,1Khz的PWM信号,然后我们再在main的while循环运行这串输出代码即可,当然,main函数里不可以有延时。
至于如何输出高电平,如何输出低电平,其实就跟控制继电器和蜂鸣器一样,毕竟都是ULN芯片控制的,前边也介绍过ULN芯片了,可以看这篇文章中关于继电器开启与关闭的部分
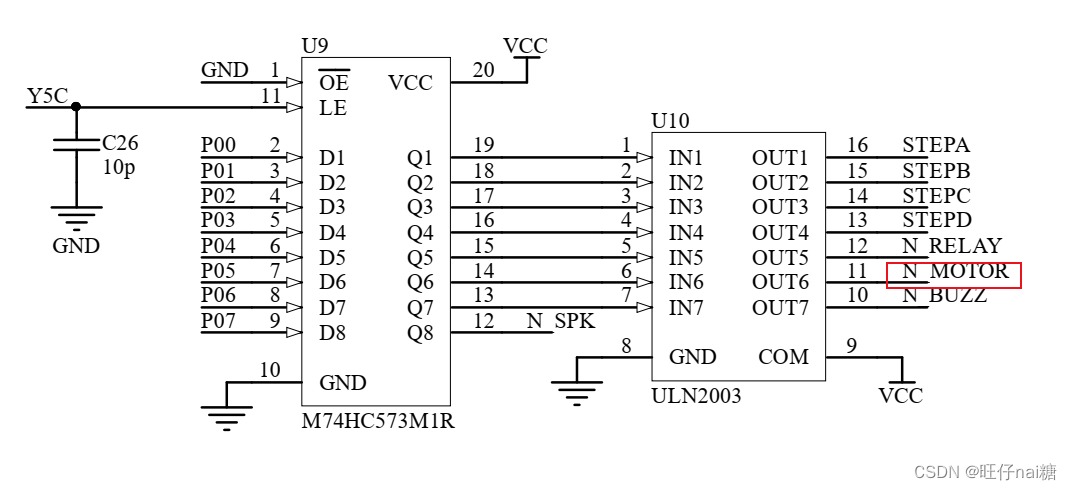
只是开关继电器我们控制的事N RELAY引脚的高低电平,现在我们需要控制N MOTOR引脚的高低电平而已。
输出80%和20%占空比,1KHz信号的代码如下:
#define MOTOR_ON() ULN|=0x20; P0=ULN;P2|=0xA0;P2&=0xBF;P2&=0x1F;
#define MOTOR_OFF() ULN&=0xDF; P0=ULN;P2|=0xA0;P2&=0xBF;P2&=0x1F;void Delay800us(void) //@12.000MHz
{
unsigned char data i, j;i = 10;
j = 83;
do
{
while (--j);
} while (--i);
}
void Delay200us(void) //@12.000MHz
{
unsigned char data i, j;i = 3;
j = 82;
do
{
while (--j);
} while (--i);
}
void PWM_out_80(void)//输出duty为80的PWM
{
MOTOR_ON()
Delay800us();
MOTOR_OFF();
Delay200us();
}
void PWM_out_20(void)//输出duty为20的PWM
{
MOTOR_ON()
Delay200us();
MOTOR_OFF();
Delay800us();
}
6.长按功能的实现
虽然之前提到过,这里还是介绍一下我个人的思路吧。
题目上要求的是长按1s,那我也以长按1s为例介绍,如何判断长按1s吧。
首先定义一个标志位is_1s,在定时器里检查is_1s,如果is_1s=0,则开始数数(定时器每1s进一次),数够1000了,就让is_1s置为1,如果检测到is_1s已经是1了,则清零数数。注意初始状态下is_1s应为1.
bit is_1s=1;
unsigned int count_1000ms=0;//为长按按键数数
void Timer2_Isr(void) interrupt 12
{
if(is_1s==0)//1s数数,主要服务于长按S7 1秒
{
if(++count_1000ms==1000)
{
is_1s=1;
count_1000ms=0;
}
}
else
{
count_1000ms=0;
}
}
现在就需要我们利用这个is_1s来判断长按是否达到1s了。其实对于长按1s我一直有两种理解,最开始的时候我理解的是长按达到1s后松开,则触发效果,不过现在感觉这样理解的不对,应该是长按1S之后,就算没松开按键,也应该产生长按1s的现象了。我们在按下按键后第一个Delay5ms()消抖之后加上is_1s=0来开始计时,在while(P30==0)里判断is_1s的值,如果is_1s为1了,也就是说从上一次清零(即按下按键之后)到现在,已经过来1s,此时就判定为长按1s了,处理长按1s并跳出while循环。具体代码如下:
P3=0xFF;
if(P30==0)
{
Delay5ms();
is_1s=0;//is_1s置为0的1s之后会被定时器置为1,通过检查is_1s就可以判断是否长按了1S
while(P30==0)
{if(is_1s==1&&mod==2)//如果检测到长按1s了,并且此时处在湿度界面
{
write_at(0,0);//则重置计数
break;
}
}
is_1s=1;
Delay5ms();
key_value=7;
}
三、完整代码演示
首先,我要说明,因为PWM输出需要持续修改ULN的值,可能会导致数据窜位,进而导致蜂鸣器和继电器条一下。之前在LED处理时就提到过,应该避免重复开关控制某个外设的锁存器,LED也进行了相关处理,但是这个PWM没办法,不得不重复开关它的锁存器。这是代码中没有解决的问题(之一)。
另外,由于LED灯需要100ms闪烁,刚才提到的PWM输出可以放在main的while循环里,但是循环里不能有延时,如果while循环不加延时,全用定时器数数的话,真的太麻烦了。所以我就把while里面的延时留下,不过延时的同时输出PWM了,具体可以看代码。
代码还有很多不足的地方,不过内容基本实现了。
后续还是老老实实做省赛的题目吧......
main.c
#include <stc15.h>
#include <intrins.h>
#include "iic.h"
code unsigned char Seg_Table[] =
{
0xc0, //0
0xf9, //1
0xa4, //2
0xb0, //3
0x99, //4
0x92, //5
0x82, //6
0xf8, //7
0x80, //8
0x90, //9
0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,
0xFF,//熄灭 20
0x8E, //F 21
0x89,//H 22
0x88, //A 23
0x8C, //P 24
};
volatile unsigned char Led_Num=0xFF;
volatile unsigned char ULN=0x00;
#define LED_ON(x) Led_Num&=~(0x01<<x);P0=Led_Num;P2|=0x80;P2&=0x9F;P2&=0x1F;
#define LED_OFF(x) Led_Num|=0x01<<x; P0=Led_Num;P2|=0x80;P2&=0x9F;P2&=0x1F;
#define LED_OFF_ALL() Led_Num=0xFF; P0=Led_Num;P2|=0x80;P2&=0x9F;P2&=0x1F;
#define NIXIE_CHECK() P2|=0xC0;P2&=0xDF;P2&=0x1F;
#define NIXIE_ON() P2|=0xE0;P2&=0xFF;P2&=0x1F;
#define MOTOR_ON() ULN|=0x20; P0=ULN;P2|=0xA0;P2&=0xBF;P2&=0x1F;
#define MOTOR_OFF() ULN&=0xDF; P0=ULN;P2|=0xA0;P2&=0xBF;P2&=0x1F;
#define RELAY_ON() ULN|=0x10; P0=ULN;P2|=0xA0;P2&=0xBF;P2&=0x1F;
#define RELAY_OFF() ULN&=0xEF; P0=ULN;P2|=0xA0;P2&=0xBF;P2&=0x1F;
void get_key(void);
void Delay100ms(void); //@12.000MHz
void Delay5ms(void); //@12.000MHz
void Timer0_Init(void);
void Timer1_Init(void); //1毫秒@12.000MHz
void Timer2_Init(void); //1毫秒@12.000MHz
void send_wave(void);
void read_remote(void);
void read_ne555(void);
void show_menu(void);
void run(void);
void PWM_out_80(void);
void PWM_out_20(void);
void Led_run(void);
void relay_run(void);
unsigned char location;
unsigned char key_value=0;
unsigned char Nixie_num[]={20,20,20,20,20,20,20,20};
unsigned char AD=0;
sbit TX=P1^0;
sbit RX=P1^1;
bit is_read_remote=0;
bit is_read_555=0;
unsigned int remote=0;
unsigned int fre=0;
unsigned char mod=0;
unsigned char fre_canshu=90;//频率参数的单位是0.1KHz
unsigned char shidu_canshu=40;
unsigned char remote_canshu=6;
unsigned char shidu=0;
unsigned char count_relay=0;
bit relay_is_on=0;
void main()
{
unsigned char count_100=0;//中间变量,记录100个1ms循环
LED_OFF_ALL();//关闭LED灯
RELAY_OFF();//关闭继电器
count_relay=read_at(0);//读取继电器闭合次数
Delay100ms();
Timer0_Init();
Timer1_Init();
Timer2_Init();
EA=1;
while(1)
{
get_key();//读取按键
run();
while(1)//一个100ms的延时,延时的同时,输出PWM驱动电机
{//迫不得已的做法,主要LED灯闪烁哪里太需要这个100ms的延时了
if(++count_100==100)//100ms后跳出while(1)循环,下边的PWM输出一次刚好1ms
{
count_100=0;
break;
}
//在此延时100ms的循环内,输出PWM,1KHz的PWM周期刚好是1ms
//注意频率参数的单位是0.1KHz
if(fre/100>fre_canshu)//如果频率大于频率参数的话
PWM_out_80();//就输出duty为80的PWM
else if(fre/100<=fre_canshu)//如果频率小于频率参数的话
PWM_out_20();//就输出duty为20的PWM
}
}
}
void run()
{
unsigned char DA=0;//定义一个中间变量,用于记录待输出的DA值
read_remote();//超声波测距
read_ne555();//读取NE555
show_menu();//显示菜单
Led_run();//控制LED灯运行
relay_run();//控制继电器
AD=read_pcf(3);AD=read_pcf(3);//读取电位计,因为下边还要DA输出,这里重复读取两次是为了防止读取不出来数据
shidu=AD*0.3921;//湿度值=AD/255*100;
DA=(shidu-shidu_canshu)*4/(80-shidu_canshu)+1;//根据曲线拟合出的函数
DA=DA>5 ? 5 : DA;//限制输出幅值
DA=DA<1 ? 1 :DA;
write_pcf(DA*51);write_pcf(DA*51);//同上连续输出两次。输出=待输出电压/5*255;
}
bit is_1s=1;
unsigned int count_500ms;
unsigned int count_1s=0;
unsigned int count_1000ms=0;//为长按按键数数
void Timer2_Isr(void) interrupt 12
{
P0=0x01<<location;NIXIE_CHECK();//数码管扫描
P0=Seg_Table[Nixie_num[location]];NIXIE_ON();
if(++location==8)
location=0;
if(is_read_remote==0)//每500ms读取一次超声波
{
if(++count_500ms==500)
{
is_read_remote=1;
count_500ms=0;
}
}
if(is_read_555==0)//每过1s读取一次Ne555
{
if(++count_1s==1000)
{
is_read_555=1;
count_1s=0;
}
}
if(is_1s==0)//1s数数,主要服务于长按S7 1秒
{
if(++count_1000ms==1000)
{
is_1s=1;
count_1000ms=0;
}
}
else
{
count_1000ms=0;
}
}
void Timer0_Init(void)
{
AUXR = 0x80; //定时器0为1T模式
TMOD = 0x04; //设置定时器0为16位自动重装载外部记数模式
TH0 = TL0 = 0x00; //设置定时器0初始值
TR0 = 1; //定时器0开始工作
//ET0 = 1; //开定时器0中断
}
void Timer1_Init(void) //1毫秒@12.000MHz
{
AUXR |= 0x40; //定时器时钟1T模式
TMOD &= 0x0F; //设置定时器模式
TL1 = 0x20; //设置定时初始值
TH1 = 0xD1; //设置定时初始值
TF1 = 0; //清除TF1标志
//TR1 = 1; //定时器1开始计时
}
void Timer2_Init(void) //1毫秒@12.000MHz
{
AUXR |= 0x04; //定时器时钟1T模式
T2L = 0x20; //设置定时初始值
T2H = 0xD1; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0x04; //使能定时器2中断
}
void Delay100ms(void) //@12.000MHz
{
unsigned char data i, j, k;
_nop_();
_nop_();
i = 5;
j = 144;
k = 71;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay5ms(void) //@12.000MHz
{
unsigned char data i, j;
i = 59;
j = 90;
do
{
while (--j);
} while (--i);
}
void get_key(void)
{
unsigned char key_P3=P3;
P3=0xFF;
if(P30==0)
{
Delay5ms();
is_1s=0;//is_1s置为0的1s之后会被定时器置为1,通过检查is_1s就可以判断是否长按了1S
while(P30==0)
{
run();
if(is_1s==1&&mod==2)//如果检测到长按1s了,并且此时处在湿度界面
{
write_at(0,0);//则重置计数
break;
}
}
is_1s=1;
Delay5ms();
key_value=7;
}
else if(P31==0){Delay5ms();while(P31==0){run();}Delay5ms();key_value=6;}
else if(P32==0){Delay5ms();while(P32==0){run();}Delay5ms();key_value=5;}
else if(P33==0){Delay5ms();while(P33==0){run();}Delay5ms();key_value=4;}
//S4菜单切换
if(key_value==4)
{
if(mod==0||mod==1)
mod=2;
else if(mod==2)
mod=3;
else if(mod==3||mod==4)
mod=5;
else if(mod==5||mod==6||mod==7)
mod=0;
}
//S5在三个参数界面之间切换
else if(key_value==5)
{
if(mod==5)
mod=6;
else if(mod==6)
mod=7;
else if(mod==7)
mod=5;
}
//S6 在参数界面:加 在距离界面,切换距离单位
else if(key_value==6)
{
if(mod==5)
fre_canshu=fre_canshu<120 ? fre_canshu+5 : 10;//限幅,下同
else if(mod==6)
shidu_canshu=shidu_canshu<60 ? shidu_canshu+10 : 10;
else if(mod==7)
remote_canshu=remote_canshu<12 ? remote_canshu+1 : 1;
if(mod==3)
mod=4;
else if(mod==4)
mod=3;
}
//S7 在参数界面:减 在频率界面,切换频率单位 长按功能在上边读取按键那里
else if(key_value==7)
{
if(mod==5)
fre_canshu=fre_canshu>10 ? fre_canshu-5 : 120;//限幅
else if(mod==6)
shidu_canshu=shidu_canshu>10 ? shidu_canshu-10 : 60;
else if(mod==7)
remote_canshu=remote_canshu>1 ? remote_canshu-1 : 12;
if(mod==0)
mod=1;
else if(mod==1)
mod=0;
}
key_value=0;
P3=key_P3;
}
void Delay14us(void) //@12.000MHz
{
unsigned char data i;
_nop_();
_nop_();
i = 47;
while (--i);
}
void send_wave(void)
{
unsigned char i=0;
for(;i<8;i++)
{
TX=0;Delay14us();
TX=1;Delay14us();
}
}
void read_remote(void)
{
unsigned int url_t=0;//记录超声波来回的时间,注意没有单位
if(is_read_remote==1)//没过一段时间读取一次超声波,避免连续发送读取时相互干扰
{
is_read_remote=0;
send_wave();//发送超声波
TR1=1;//开始计时
while(RX==1&&TF1==0);//如果检测到返回的超声波或者定时器超时
TR1=0;//停止计时
if(RX==0)//如果检测到了返回的超声波
{//则记录来回的时间
url_t=TH1;
url_t<<=8;
url_t|=TL1;
}
else//如果超声波超时
{
url_t=0;
}
//实际的时间=url_t/12000000秒
//实际的距离=(url_t/12000000)*340*100/2 厘米
remote=(unsigned int)(url_t*0.001417);
url_t=0;//为下次读取超声波,清零所有数据。下同
TL1=0;TH1=0;
TF1=0;
}
}
void read_ne555(void)
{
if(is_read_555==1)//每隔1s读取一次NE555,读出来的数据就刚好是频率
{
is_read_555=0;
TR0=0;
fre=TH0;//读取频率
fre<<=8;
fre|=TL0;
TH0=0;//清零相关数据
TL0=0;
TF0=0;
TR0=1;
}
}
void show_menu(void)
{
if(mod==0)//显示频率
{
Nixie_num[0]=21,//F
Nixie_num[1]=20,
Nixie_num[2]=fre/100000>0 ? fre/100000%10 : 20;
Nixie_num[3]=fre/10000>0 ? fre/10000%10 : 20;
Nixie_num[4]=fre/1000>0 ? fre/1000%10 : 20;
Nixie_num[5]=fre/100>0 ? fre/100%10 : 20;
Nixie_num[6]=fre/10>0 ? fre/10%10 : 20;
Nixie_num[7]=fre/1>0 ? fre/1%10 : 20;
}
else if(mod==1)//显示频率,单位KHz
{
Nixie_num[0]=21,
Nixie_num[1]=20,
Nixie_num[2]=fre/10000000>0 ? fre/10000000%10 : 20;
Nixie_num[3]=fre/1000000>0 ? fre/1000000%10 : 20;
Nixie_num[4]=fre/100000>0 ? fre/100000%10 : 20;
Nixie_num[5]=fre/10000>0 ? fre/10000%10 : 20;
Nixie_num[6]=fre/1000>0 ? fre/1000%10+10 : 10;//显示带小数点的数字
Nixie_num[7]=fre/100>0 ? fre/100%10 : 0;
}
else if(mod==2)//显示湿度
{
Nixie_num[0]=22,
Nixie_num[1]=20,
Nixie_num[2]=20;
Nixie_num[3]=20;
Nixie_num[4]=20;
Nixie_num[5]=20;
Nixie_num[6]=shidu/10>0 ? shidu/10%10 : 20;
Nixie_num[7]=shidu/1>0 ? shidu/1%10 : 0;;
}
else if(mod==3)//显示距离
{
Nixie_num[0]=23,
Nixie_num[1]=20,
Nixie_num[2]=20;
Nixie_num[3]=20;
Nixie_num[4]=20;
Nixie_num[5]=remote/100>0 ? remote/100%10 : 20;
Nixie_num[6]=remote/10>0 ? remote/10%10 : 20;
Nixie_num[7]=remote/1>0 ? remote/1%10 : 0;
}
else if(mod==4)//显示距离,单位m
{
Nixie_num[0]=23,
Nixie_num[1]=20,
Nixie_num[2]=20;
Nixie_num[3]=20;
Nixie_num[4]=20;
Nixie_num[5]=remote/100>0 ? remote/100%10+10 : 10;
Nixie_num[6]=remote/10>0 ? remote/10%10 : 0;
Nixie_num[7]=remote/1>0 ? remote/1%10 : 0;
}
else if(mod==5)//显示频率参数
{
Nixie_num[0]=24,
Nixie_num[1]=1,
Nixie_num[2]=20;
Nixie_num[3]=20;
Nixie_num[4]=20;
Nixie_num[5]=fre_canshu/100>0 ? fre_canshu/100%10 : 20;
Nixie_num[6]=fre_canshu/10>0 ? fre_canshu/10%10+10 : 10;
Nixie_num[7]=fre_canshu/1>0 ? fre_canshu/1%10 : 0;
}
else if(mod==6)//显示湿度参数
{
Nixie_num[0]=24,
Nixie_num[1]=2,
Nixie_num[2]=20;
Nixie_num[3]=20;
Nixie_num[4]=20;
Nixie_num[5]=20;
Nixie_num[6]=shidu_canshu/10%10;
Nixie_num[7]=shidu_canshu/1%10;
}
else if(mod==7)//显示距离参数
{
Nixie_num[0]=24,
Nixie_num[1]=3,
Nixie_num[2]=20;
Nixie_num[3]=20;
Nixie_num[4]=20;
Nixie_num[5]=20;
Nixie_num[6]=remote_canshu/10%10+10;
Nixie_num[7]=remote_canshu/1%10;
}
}
void Delay800us(void) //@12.000MHz
{
unsigned char data i, j;
i = 10;
j = 83;
do
{
while (--j);
} while (--i);
}
void Delay200us(void) //@12.000MHz
{
unsigned char data i, j;
i = 3;
j = 82;
do
{
while (--j);
} while (--i);
}
void PWM_out_80(void)//输出duty为80的PWM
{
MOTOR_ON()
Delay800us();
MOTOR_OFF();
Delay200us();
}
void PWM_out_20(void)//输出duty为20的PWM
{
MOTOR_ON()
Delay200us();
MOTOR_OFF();
Delay800us();
}
void Led_run(void)
{
static bit L1_is_on=0;
static bit L2_is_on=0;
static bit L3_is_on=0;
static bit L4_is_on=0;
static bit L5_is_on=0;
static bit L6_is_on=0;
//配合主函数里的100ms延时,即可达到每次运行Led_run切换一次灯的状态,完成闪烁
if(mod==0||mod==1)//在频率界面,L1闪烁
{
if(L1_is_on==0)//如果L1没有点亮,则点亮
{
LED_ON(0);
L1_is_on=1;
}
else if(L1_is_on==1)//否则熄灭。
{
LED_OFF(0);
L1_is_on=0;
}
}
else if(mod==2)//在湿度界面,L2闪烁
{
if(L2_is_on==0)
{
LED_ON(1);
L2_is_on=1;
}
else if(L2_is_on==1)
{
LED_OFF(1);
L2_is_on=0;
}
}
else if(mod==3||mod==4)//在距离界面,L3闪烁
{
if(L3_is_on==0)
{
LED_ON(2);
L3_is_on=1;
}
else if(L3_is_on==1)
{
LED_OFF(2);
L3_is_on=0;
}
}
//下面为退出某个模式,但是刚好闪烁到LED点亮的状态,则关闭不该点亮的LED
if(!(mod==0||mod==1)&&L1_is_on==1)//如果不在频率界面,并且L1点亮了
{//则熄灭。。下边都一样
LED_OFF(0);
L1_is_on=0;
}
else if(!(mod==2)&&L2_is_on==1)
{
LED_OFF(1);
L2_is_on=0;
}
else if(!(mod==3||mod==4)&&L3_is_on==1)
{
LED_OFF(2);
L3_is_on=0;
}
//如果频率大于频率参数,并且L4没有点亮,
if(fre/100>fre_canshu&&L4_is_on==0)//注意频率参数的单位是0.1KHz
{//则点亮
LED_ON(3);
L4_is_on=1;
}
else if((!(fre/100>fre_canshu))&&L4_is_on==1)//如果频率小于频率参数,并且L4还没西梅
{//则熄灭。。下同
LED_OFF(3);
L4_is_on=0;
}
if(shidu>shidu_canshu&&L5_is_on==0)//
{
LED_ON(4);
L5_is_on=1;
}
else if(!(shidu>shidu_canshu)&&L5_is_on==1)
{
LED_OFF(4);
L5_is_on=0;
}
if(remote/10>remote_canshu&&L6_is_on==0)
{
LED_ON(5);
L6_is_on=1;
}
else if(!(remote/10>remote_canshu)&&L6_is_on==1)
{
LED_OFF(5);
L6_is_on=0;
}
}
void relay_run(void)
{
if((remote/10>=remote_canshu)&&(relay_is_on==0))//如果距离大于距离参数,并且继电器没有打开
{//则打开继电器
relay_is_on=1;
RELAY_ON();
write_at(0,++count_relay);
}
else if((!(remote/10>remote_canshu))&&(relay_is_on==1))//如果距离小于距离参数,并且继电器打开了
{//则熄灭
relay_is_on=0;
RELAY_OFF();
}
}iic.c
/* # I2C代码片段说明
1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。
2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题
中对单片机时钟频率的要求,进行代码调试和修改。
*/
#include <stc15.h>
#include <intrins.h>
#include "iic.h"
sbit sda=P2^1;
sbit scl=P2^0;
#define DELAY_TIME 5
//
static void I2C_Delay(unsigned char n)
{
do
{
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();_nop_();
}
while(n--);
}
//
void I2CStart(void)
{
sda = 1;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 0;
I2C_Delay(DELAY_TIME);
scl = 0;
}
//
void I2CStop(void)
{
sda = 0;
scl = 1;
I2C_Delay(DELAY_TIME);
sda = 1;
I2C_Delay(DELAY_TIME);
}
//
void I2CSendByte(unsigned char byt)
{
unsigned char i;
for(i=0; i<8; i++){
scl = 0;
I2C_Delay(DELAY_TIME);
if(byt & 0x80){
sda = 1;
}
else{
sda = 0;
}
I2C_Delay(DELAY_TIME);
scl = 1;
byt <<= 1;
I2C_Delay(DELAY_TIME);
}
scl = 0;
}
//
unsigned char I2CReceiveByte(void)
{
unsigned char da;
unsigned char i;
for(i=0;i<8;i++){
scl = 1;
I2C_Delay(DELAY_TIME);
da <<= 1;
if(sda)
da |= 0x01;
scl = 0;
I2C_Delay(DELAY_TIME);
}
return da;
}
//
unsigned char I2CWaitAck(void)
{
unsigned char ackbit;
scl = 1;
I2C_Delay(DELAY_TIME);
ackbit = sda;
scl = 0;
I2C_Delay(DELAY_TIME);
return ackbit;
}
//
void I2CSendAck(unsigned char ackbit)
{
scl = 0;
sda = ackbit;
I2C_Delay(DELAY_TIME);
scl = 1;
I2C_Delay(DELAY_TIME);
scl = 0;
sda = 1;
I2C_Delay(DELAY_TIME);
}
void write_pcf(unsigned char add)
{
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(0x40);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CStop();
}
unsigned char read_pcf(unsigned char add)
{
unsigned char ad=0;
I2CStart();
I2CSendByte(0x90);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CStop();
I2CStart();
I2CSendByte(0x91);
I2CWaitAck();
ad=I2CReceiveByte();
I2CSendAck(1);
I2CStop();
return ad;
}
void write_at(unsigned char add,dat)
{
I2CStart();
I2CSendByte(0xA0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CSendByte(dat);
I2CWaitAck();
I2CStop();
}
unsigned char read_at(unsigned char add)
{
unsigned char at=0;
I2CStart();
I2CSendByte(0xA0);
I2CWaitAck();
I2CSendByte(add);
I2CWaitAck();
I2CStop();
I2CStart();
I2CSendByte(0xA1);
I2CWaitAck();
at=I2CReceiveByte();
I2CSendAck(1);
I2CStop();
return at;
}iic.h
#ifndef _IIC_H_
#define _IIC_H_
void write_pcf(unsigned char add);
unsigned char read_pcf(unsigned char add);
void write_at(unsigned char add,dat);
unsigned char read_at(unsigned char add);
#endif