文章目录
1. 前言
无约束优化问题常用的求解算法有梯度下降法(基于迭代)、最小二乘法(基于解析解)、牛顿法&拟牛顿法(基于迭代)。今天先介绍最常用的梯度下降法。
2. 梯度的含义
2.1 导数
正式介绍梯度之前,我们可以先回想一下导数。函数在某一点的导数是指函数在这个点的变化率,几何意义为函数在这个点上的切线的斜率,这个概念大家一定不陌生!(在一元情况下,梯度就是导数)


2.2 偏导数
函数在某一点,关于某个自变量的变化率。
比如函数 f ( x , y ) f(x,y) f(x,y), 分别对 x x x, y y y求偏导数为: ∂ f ∂ x \frac{\partial f}{\partial x} ∂x∂f, ∂ f ∂ y \frac{\partial f}{\partial y} ∂y∂f。
2.4 梯度
对多元函数的参数求 ∂ \partial ∂偏导数,把求得的各个参数的偏导数以向量的形式写出来,就是梯度。
比如对于函数 f ( x , y ) f(x,y) f(x,y), 分别对 x x x, y y y求偏导数为: ∂ f ∂ x \frac{\partial f}{\partial x} ∂x∂f, ∂ f ∂ y \frac{\partial f}{\partial y} ∂y∂f,其梯度向量就是 ( ∂ f ∂ x , ∂ f ∂ y ) (\frac{\partial f}{\partial x}, \frac{\partial f}{\partial y}) (∂x∂f,∂y∂f),简称 g r a d f ( x , y ) grad f(x,y) gradf(x,y)或者 ▽ f ( x , y ) \bigtriangledown f(x,y) ▽f(x,y) 。
梯度的方向代表了函数增加最快的方向,比如对于函数 f ( x , y ) f(x,y) f(x,y)来说,它在 ( x 0 , y 0 ) (x_0, y_0) (x0,y0)处,沿着梯度方向 ( ∂ f ∂ x 0 , ∂ f ∂ y 0 ) (\frac{\partial f}{\partial x_0}, \frac{\partial f}{\partial y_0}) (∂x0∂f,∂y0∂f)移动就是使得 f ( x , y ) f(x,y) f(x,y)增加最快的方向,因此就最快找到函数的最大值。反之,如果我们想找的是函数的最小值,只要沿着梯度相反的方向 ( − ∂ f ∂ x 0 , − ∂ f ∂ y 0 ) (-\frac{\partial f}{\partial x_0}, -\frac{\partial f}{\partial y_0}) (−∂x0∂f,−∂y0∂f)移动就可以了。
3. 梯度下降法详解
3.1 直观理解
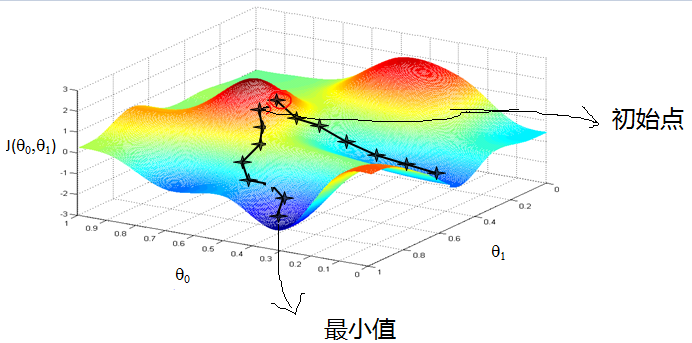
想象我们在一座大山上,由于我们不知道怎么下山,于是只能走一步看一步,也就是每走到一个位置的时候,求解当前位置的梯度,然后沿着负梯度的方向,也就是最陡峭的方向往下走。就这样一直走下去,直到我们觉得来到了山脚下。当然,按照这个方法我们不一定能到达真正的山脚,有可能知识到达了某一个局部的山峰低处。
3.2 基本概念
(1)步长:每次沿着梯度的方向走的距离;
(2)特征:样本的输入部分,比如一个单特征样本 ( x 0 , y 0 ) (x_0,y_0) (x0,y0),它的特征就是 x 0 x_0 x0,标签是 y 0 y_0 y0;
(3)假设函数:在监督学习中,为了拟合输入样本和输出值的关系,我们会设置一个假设函数 h θ ( x ) h_{\theta}(x) hθ(x),对于单个特征的 m m m个样本 ( x 0 i , y 0 i ) , i = 1... m (x_0^i,y_0^i), i=1...m (x0i,y0i),i=1...m,我们可以采用的拟合函数是: h θ ( x ) = θ 0 + θ 1 x h_{\theta}(x) = \theta_0 + \theta_1x hθ(x)=θ0+θ1x
(4)损失函数:用于评估拟合值和真实label之间差距的效果函数,损失函数越小,则拟合的越好。
3.3 算法流程(代数理解)
(1)确定假设函数和损失函数;
比如对于线性回归,假设函数表示为 h θ ( x 1 , x 2 , . . . , x n ) = θ 0 + θ 1 x 1 + . . . + θ n x n h_{\theta}(x_1, x_2,...,x_n)=\theta_0+\theta_1x_1+...+\theta_nx_n hθ(x1,x2,...,xn)=θ0+θ1x1+...+θnxn,其中 θ n \theta_n θn为模型参数;
损失函数可以表示为:
J ( θ 1 , θ 2 , . . . , θ n ) = 1 2 m ∑ j = 1 m ( h θ ( x 1 j , x 2 j , . . . , x n j ) − y j ) 2 J(\theta_1, \theta_2,..., \theta_n)=\frac{1}{2m}\sum_{j=1}^{m}(h_{\theta}(x_1^j, x_2^j,...,x_n^j)-y_j)^2 J(θ1,θ2,...,θn)=2m1j=1∑m(hθ(x1j,x2j,...,xnj)−yj)2
(2)初始化参数;
- 步长 α \alpha α:比如1;
- θ n \theta_n θn:比如0;
- 终止距离 ϵ \epsilon ϵ:比如10.
(3)梯度下降法迭代过程
step 1: 计算当前位置,对于 θ i \theta_i θi,其梯度的表达式:
∂ J ( θ 1 , θ 2 , . . . , θ n ) ∂ θ i = 1 m ∑ j = 1 m ( h θ ( x 1 , x 2 , . . . , x n ) − y j ) x i \frac{\partial J(\theta_1, \theta_2,..., \theta_n)}{\partial \theta_i} = \frac{1}{m}\sum_{j=1}^{m}(h_{\theta}(x_1, x_2,...,x_n)-y_j)x_i ∂θi∂J(θ1,θ2,...,θn)=m1j=1∑m(hθ(x1,x2,...,xn)−yj)xi
step 2: 用步长乘以损失函数的梯度,得到当前位置的下降距离;
即: α ∗ ∂ J ( θ 1 , θ 2 , . . . , θ n ) ∂ θ i \alpha * \frac{\partial J(\theta_1, \theta_2,..., \theta_n)}{\partial \theta_i} α∗∂θi∂J(θ1,θ2,...,θn)
step 3: 判断是否停止迭代;
确认对于所有的 θ i \theta_i θi,其梯度下降的距离是否小于停止距离 ϵ \epsilon ϵ,如果是,则当前所有的 θ i \theta_i θi为最终参数,否则进入下一步;
step 4:更心所有的 θ i \theta_i θi:
θ i = θ i − α ∗ ∂ J ( θ 1 , θ 2 , . . . , θ n ) ∂ θ i \theta_i = \theta_i-\alpha*\frac{\partial J(\theta_1, \theta_2,..., \theta_n)}{\partial \theta_i} θi=θi−α∗∂θi∂J(θ1,θ2,...,θn)
4. 算法调优
(1)算法参数的调优:步长、终止距离、初始参数的选择;
(2)归一化:让样本数据的大小在同一个维度;常用的方法是对每个特征 x x x,求出其期望 x ˉ \bar x xˉ和标准差 s t d ( x ) std(x) std(x),然后转化为:
x − x ˉ s t d ( x ) \frac{x-\bar x}{std(x)} std(x)x−xˉ
5. 三个基本的梯度下降法
5.1 批量梯度下降法 (Batch Gradient Descent)
每次更新参数时,使用所有样本进行更新,假设我们一共有 m m m个样本,则更新公式为:
θ i = θ i − α ∗ ∂ J ( θ 1 , θ 2 , . . . , θ n ) ∂ θ i = θ i − α ∗ 1 m ∑ j = 1 m ( h θ ( x 1 j , x 2 j , . . . , x n j ) − y j ) x i j \theta_i = \theta_i-\alpha*\frac{\partial J(\theta_1, \theta_2,..., \theta_n)}{\partial \theta_i} \\ =\theta_i-\alpha * \frac{1}{m}\sum_{j=1}^{m}(h_{\theta}(x_1^j, x_2^j,...,x_n^j)-y_j)x_i^j θi=θi−α∗∂θi∂J(θ1,θ2,...,θn)=θi−α∗m1j=1∑m(hθ(x1j,x2j,...,xnj)−yj)xij
5.2 随机梯度下降法 (Stochastic Gradient Descent)
每次更新参数时,使用单个样本进行更新,假设我们选择第 j j j个样本进行更新:
θ i = θ i − α ∗ ( h θ ( x 1 j , x 2 j , . . . , x n j ) − y j ) x i j \theta_i =\theta_i-\alpha * (h_{\theta}(x_1^j, x_2^j,...,x_n^j)-y_j)x_i^j θi=θi−α∗(hθ(x1j,x2j,...,xnj)−yj)xij
随机梯度下降法训练速度更快,但是由于它只是用一个样本决定梯度的方向,很有可能不是朝最优的方向在走,因此不能很快的收敛性。
5.3 小批量梯度下降法 (Mini-batch Gradient Descent)
前面的批量梯度下降法和随机梯度下降法有点像是两个极端,一个用所有的样本来更心参数,一个只随机挑选一个来更新参数,小批量梯度下降法则类似于两者的折中,每次采样选择 n n n个样本来迭代,因此,更新的公式为:
θ i = θ i − α ∗ 1 n ∑ j = 1 n ( h θ ( x 1 j , x 2 j , . . . , x n j ) − y j ) x i j \theta_i =\theta_i-\alpha * \frac{1}{n}\sum_{j=1}^{n}(h_{\theta}(x_1^j, x_2^j,...,x_n^j)-y_j)x_i^j θi=θi−α∗n1j=1∑n(hθ(x1j,x2j,...,xnj)−yj)xij
6. 梯度下降法的改进算法
原始的梯度下降法可能存在:在梯度平缓的维度下降缓慢、在梯度险峻的位置抖动很大,容易陷入局部最优等缺点。因此出现了很多改进的梯度下降算法,包括:冲量梯度下降法、 NAG: Nesterov Accelerated Gradient、 AdaGrad、AdaDelta等等。
等后面用到的时候再补充吧!