20240423给飞凌的OK3588-C开发板适配OV13855【绿屏】
2024/4/22 20:29
开发板:飞凌的OK3588-C
OS操作系统:linux R4/Buildroot
【OV13855接到CAM1上,如果要接到CAM2上请修改相关的DTS即可】
https://item.taobao.com/item.htm?_u=nju3ku2f48&id=729775969547&spm=a1z09.2.0.0.13c22e8dafwahD
OV13850/OV13855摄像头模组适用3399/3568/3588飞凌嵌入式开发板
颜色分类:OV13855自动对焦摄像头
缘起:想调试OV13855很久了!
一直没有找到机会!
【当时想在RK3399平台上搞通OV13850的4K录像,貌似两个都不行!】
发现Orange Pi5是可以支持OV13850和OV13855的!
【并且还可以混搭的!】^_
【Orange Pi5开发板上面的OV13855是好的,还可以4K录像!】
你要找一个32GB的TF卡和一台HDMI显示器,使用
C:\Android镜像烧录工具-SDDiskTool\SDDiskTool_v1.72\SD_Firmware_Tool.exe
刷机:OrangePi5_RK3588S_Android12_v1.0.5.img。
摄像头OV13855的PIN脚定义见附件:OV13855的摄像头资料20240422.zip
对DTS/ov13855.c和Makefile修改参考了Orange Pi5的SDK。
http://www.orangepi.cn/html/hardWare/computerAndMicrocontrollers/service-and-support/Orange-pi-5.html
android源码
修改的文件:OK3588_Linux_fs_ov13855e_20240420_1409.7z
【ov13855.c 必须使用 Orange Pi5的SDK中的,否则只有绿色但是没有 影子!】
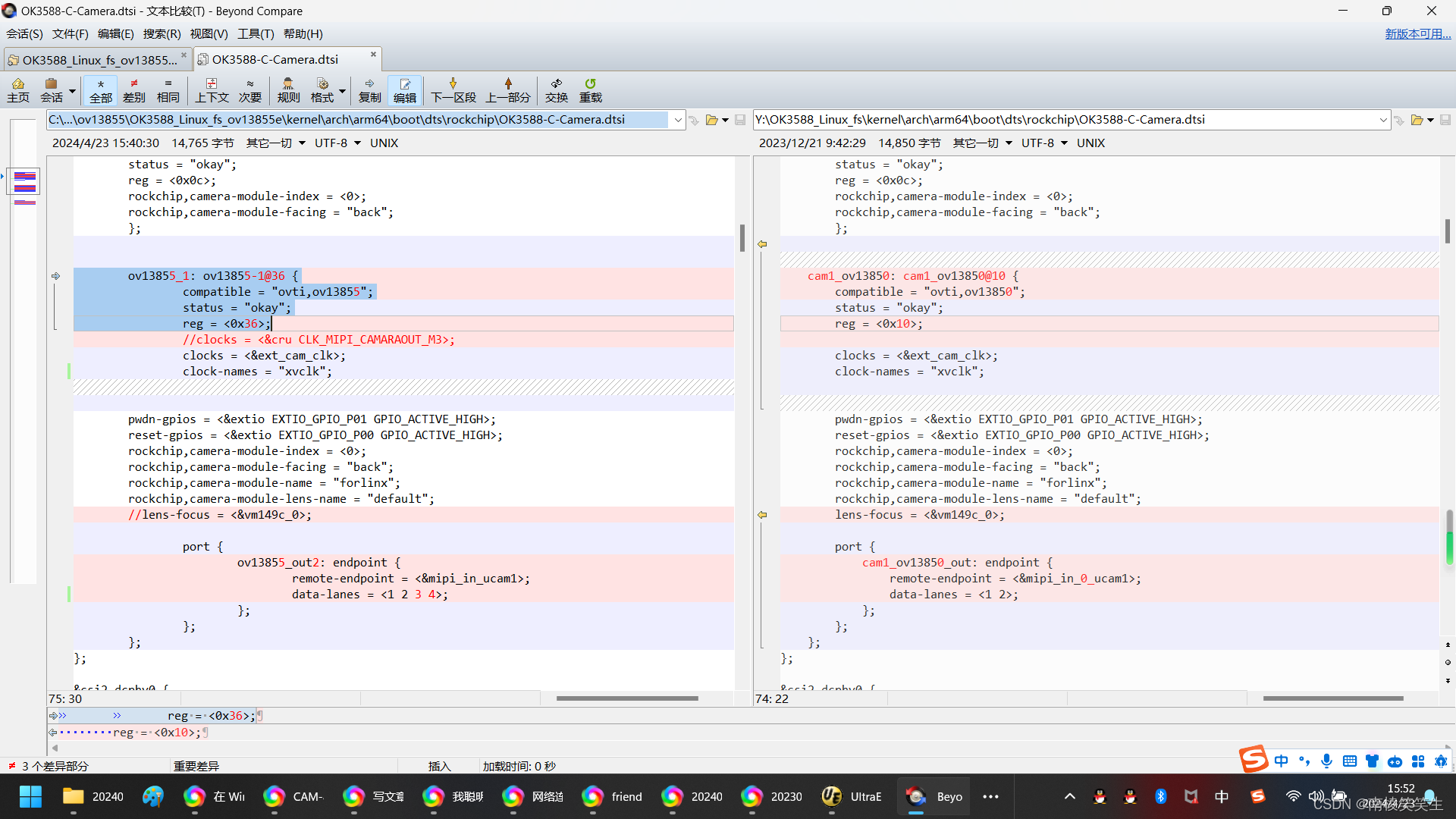

修改的文件:
Z:\OK3588_Linux_fs\kernel\arch\arm64\boot\dts\rockchip\OK3588-C-Camera.dtsi
Z:\OK3588_Linux_fs\kernel\drivers\media\i2c\Makefile
obj-$(CONFIG_VIDEO_VM149C) += vm149c.o
#obj-$(CONFIG_VIDEO_OV13855) += ov13855.o
obj-y += ov13855.o
obj-$(CONFIG_VIDEO_OV13858) += ov13858.o
Z:\OK3588_Linux_fs\kernel\drivers\media\i2c\ov13855.c
Orange Pi5 的 SDK中对应的文件:
Y:\Android_12\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588s-orangepi-5-camera.dtsi
Y:\Android_12\kernel-5.10\drivers\media\i2c\Makefile
Y:\Android_12\kernel-5.10\drivers\media\i2c\ov13855.c
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2022 Forlinx Co., Ltd.
*
* rkisp0 --> rkisp0_vir0/rkisp0_vir1/rkisp0_vir2/rkisp0_vir3
* rkisp1 --> rkisp1_vir0/rkisp1_vir1/rkisp1_vir2/rkisp1_vir3
* rkcif_mipi_lvds --> rkcif_mipi_lvds[0-4]_sditf
* mipicamera0 --> csi2_dcphy0 --> mipi0_csi2 -->rkcif_mipi_lvds --> rkcif_mipi_lvds_sditf --> rkisp0_vir0
* mipicamera1 --> csi2_dcphy1 --> mipi1_csi2 -->rkcif_mipi_lvds1 --> rkcif_mipi_lvds1_sditf --> rkisp0_vir1
* csi2_dphy0 or (csi2_dphy1、csi2_dphy2) dphy0
* csi2_dphy3 or (csi2_dphy4、csi2_dphy5) dphy1
* mipicamera2 --> csi2_dphy1 --> mipi2_csi2 -->rkcif_mipi_lvds2 -->rkcif_mipi_lvds2_sditf --> rkisp0_vir2
* mipicamera3 --> csi2_dphy2 --> mipi3_csi2 -->rkcif_mipi_lvds3 -->rkcif_mipi_lvds3_sditf --> rkisp1_vir0
* mipicamera4 --> csi2_dphy4 --> mipi4_csi2 -->rkcif_mipi_lvds4 -->rkcif_mipi_lvds4_sditf --> rkisp1_vir1
* mipicamera5 --> csi2_dphy5 --> mipi5_csi2 -->rkcif_mipi_lvds5 -->rkcif_mipi_lvds5_sditf --> rkisp1_vir2
* mipicamera6 --> rkcif_dvp ---> rkcif_dvp_sditf
*/
/ {
ext_cam_clk: external-camera-clock {
compatible = "fixed-clock";
clock-frequency = <24000000>;
clock-output-names = "CLK_CAMERA_24MHZ";
#clock-cells = <0>;
};
};
&rkcif {
status = "okay";
};
&rkcif_mmu {
status = "okay";
};
//************************************************
//*** CAM1 OV13850 Configuration description ***
//************************************************
&mipi_dcphy0 {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&i2c3 {
status = "okay";
clock-frequency = <400000>;
vm149c_0: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
};
ov13855_1: ov13855-1@36 {
compatible = "ovti,ov13855";
status = "okay";
reg = <0x36>;
//clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clocks = <&ext_cam_clk>;
clock-names = "xvclk";
pwdn-gpios = <&extio EXTIO_GPIO_P01 GPIO_ACTIVE_HIGH>;
reset-gpios = <&extio EXTIO_GPIO_P00 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "forlinx";
rockchip,camera-module-lens-name = "default";
//lens-focus = <&vm149c_0>;
port {
ov13855_out2: endpoint {
remote-endpoint = <&mipi_in_ucam1>;
data-lanes = <1 2 3 4>;
};
};
};
};
&csi2_dcphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam1: endpoint@1 {
reg = <1>;
remote-endpoint = <&ov13855_out2>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidcphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi0_csi2_input>;
};
};
};
};
&mipi0_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidcphy0_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi0_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds0>;
};
};
};
};
&rkcif_mipi_lvds {
status = "okay";
port {
cif_mipi_lvds0: endpoint {
remote-endpoint = <&mipi0_csi2_output>;
};
};
};
&rkcif_mipi_lvds_sditf {
status = "okay";
port {
mipi_lvds_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkisp0_vir0 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds_sditf>;
};
};
};
//************************************************
//*** CAM2 OV13850 Configuration description ***
//************************************************
&mipi_dcphy1 {
status = "okay";
};
&i2c4 {
status = "okay";
clock-frequency = <400000>;
vm149c_1: vm149c@0c {
compatible = "silicon touch,vm149c";
status = "okay";
reg = <0x0c>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "back";
};
cam2_ov13850: cam2_ov13850@10 {
compatible = "ovti,ov13850";
status = "okay";
reg = <0x10>;
clocks = <&ext_cam_clk>;
clock-names = "xvclk";
pwdn-gpios = <&extio EXTIO_GPIO_P03 GPIO_ACTIVE_HIGH>;
reset-gpios = <&extio EXTIO_GPIO_P02 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "forlinx";
rockchip,camera-module-lens-name = "default";
lens-focus = <&vm149c_1>;
port {
cam2_ov13850_out: endpoint {
remote-endpoint = <&mipi_in_1_ucam2>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dcphy1 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_1_ucam2: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam2_ov13850_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidcphy1_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi1_csi2_input>;
};
};
};
};
&mipi1_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi1_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidcphy1_out>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi1_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds1>;
};
};
};
};
&rkcif_mipi_lvds1 {
status = "okay";
port {
cif_mipi_lvds1: endpoint {
remote-endpoint = <&mipi1_csi2_output>;
};
};
};
&rkcif_mipi_lvds1_sditf {
status = "okay";
port {
mipi_lvds1_sditf: endpoint {
remote-endpoint = <&isp0_vir1>;
};
};
};
&rkisp0_vir1 {
status = "okay";
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir1: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds1_sditf>;
};
};
};
//************************************************
//*** CAM3 OV5645 Configuration Description ****
//************************************************
&csi2_dphy0_hw {
status = "okay";
};
&i2c7 {
status = "okay";
clock-frequency = <400000>;
cam3_ov5645: cam3_ov5645@3c {
compatible = "ovti,ov5645";
status = "okay";
reg = <0x3c>;
clocks = <&ext_cam_clk>;
clock-names = "xclk";
clock-frequency = <24000000>;
enable-gpios = <&extio EXTIO_GPIO_P05 GPIO_ACTIVE_HIGH>;
reset-gpios = <&extio EXTIO_GPIO_P04 GPIO_ACTIVE_LOW>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
cam3_ov5645_out: endpoint {
remote-endpoint = <&mipi_in_ucam3>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam3: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam3_ov5645_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_mipicsi0_out0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_csi2_input>;
};
};
};
};
&mipi2_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&mipi2_csi2_mipicsi0_out0>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_lvds2>;
};
};
};
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi_lvds2: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "disabled";
};
//************************************************
//*** CAM4 OV5645 Configuration Description ****
//************************************************
&csi2_dphy1_hw {
status = "okay";
};
&i2c3 {
status = "okay";
cam4_ov5645: cam4_ov5645@3c {
status = "okay";
compatible = "ovti,ov5645";
reg = <0x3c>;
clocks = <&ext_cam_clk>;
clock-names = "xclk";
clock-frequency = <24000000>;
reset-gpios = <&extio EXTIO_GPIO_P06 GPIO_ACTIVE_LOW>;
enable-gpios = <&extio EXTIO_GPIO_P07 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <1>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
cam4_ov5645_out: endpoint {
remote-endpoint = <&mipi_in_ucam4>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy4 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam4: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam4_ov5645_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_csidphy1_out0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi4_csi2_input>;
};
};
};
};
&mipi4_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&mipi4_csi2_csidphy1_out0>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi4_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in4>;
};
};
};
};
&rkcif_mipi_lvds4 {
status = "okay";
port {
cif_mipi_in4: endpoint {
remote-endpoint = <&mipi4_csi2_output>;
};
};
};
&rkcif_mipi_lvds4_sditf {
status = "disabled";
};
//************************************************
//*** CAM5 OV5645 Configuration Description ****
//************************************************
&i2c4 {
status = "okay";
cam5_ov5645: cam5_ov5645@3c {
status = "okay";
compatible = "ovti,ov5645";
reg = <0x3c>;
clocks = <&ext_cam_clk>;
clock-names = "xclk";
clock-frequency = <24000000>;
reset-gpios = <&extio EXTIO_GPIO_P10 GPIO_ACTIVE_LOW>;
enable-gpios = <&extio EXTIO_GPIO_P11 GPIO_ACTIVE_HIGH>;
rockchip,camera-module-index = <2>;
rockchip,camera-module-facing = "front";
rockchip,camera-module-name = "NC";
rockchip,camera-module-lens-name = "NC";
port {
cam5_ov5645_out: endpoint {
remote-endpoint = <&mipi_in_ucam5>;
data-lanes = <1 2>;
};
};
};
};
&csi2_dphy5 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam5: endpoint@1 {
reg = <1>;
remote-endpoint = <&cam5_ov5645_out>;
data-lanes = <1 2>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_csidphy1_out1: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi5_csi2_input>;
};
};
};
};
&mipi5_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&mipi5_csi2_csidphy1_out1>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi5_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in5>;
};
};
};
};
&rkcif_mipi_lvds5 {
status = "okay";
port {
cif_mipi_in5: endpoint {
remote-endpoint = <&mipi5_csi2_output>;
};
};
};
&rkcif_mipi_lvds5_sditf {
status = "disabled";
};
Y:\OK3588_Linux_fs\kernel\drivers\media\i2c\ov13855.c
// SPDX-License-Identifier: GPL-2.0
/*
* ov13855 camera driver
*
* Copyright (C) 2021 Rockchip Electronics Co., Ltd.
*
* V0.0X01.0X00 first version.
* V0.0X01.0X01 fix some errors.
* V0.0X01.0X02 add get_selection.
* V0.0X01.0X03
* 1. 4224x3136@15fps & 2114x1568@60fps only enable for debug.
* 2. fix some regs setting.
* V0.0X01.0X04 fix power on sequence
*/
//#define DEBUG
#include <linux/clk.h>
#include <linux/device.h>
#include <linux/delay.h>
#include <linux/gpio/consumer.h>
#include <linux/i2c.h>
#include <linux/module.h>
#include <linux/pm_runtime.h>
#include <linux/regulator/consumer.h>
#include <linux/sysfs.h>
#include <linux/slab.h>
#include <linux/version.h>
#include <linux/compat.h>
#include <linux/rk-camera-module.h>
#include <media/media-entity.h>
#include <media/v4l2-async.h>
#include <media/v4l2-ctrls.h>
#include <media/v4l2-subdev.h>
#include <linux/pinctrl/consumer.h>
#define DRIVER_VERSION KERNEL_VERSION(0, 0x01, 0x04)
#ifndef V4L2_CID_DIGITAL_GAIN
#define V4L2_CID_DIGITAL_GAIN V4L2_CID_GAIN
#endif
#define OV13855_LINK_FREQ_540MHZ 540000000U
#define OV13855_LINK_FREQ_270MHZ 270000000U
/* pixel rate = link frequency * 2 * lanes / BITS_PER_SAMPLE */
#define OV13855_PIXEL_RATE (OV13855_LINK_FREQ_540MHZ * 2LL * 4LL / 10LL)
#define OV13855_XVCLK_FREQ 24000000
#define CHIP_ID 0x00d855
#define OV13855_REG_CHIP_ID 0x300a
#define OV13855_REG_CTRL_MODE 0x0100
#define OV13855_MODE_SW_STANDBY 0x0
#define OV13855_MODE_STREAMING BIT(0)
#define OV13855_REG_EXPOSURE 0x3500
#define OV13855_EXPOSURE_MIN 4
#define OV13855_EXPOSURE_STEP 1
#define OV13855_VTS_MAX 0x7fff
#define OV13855_REG_GAIN_H 0x3508
#define OV13855_REG_GAIN_L 0x3509
#define OV13855_GAIN_H_MASK 0x1f
#define OV13855_GAIN_H_SHIFT 8
#define OV13855_GAIN_L_MASK 0xff
#define OV13855_GAIN_MIN 0x80
#define OV13855_GAIN_MAX 0x7c0
#define OV13855_GAIN_STEP 1
#define OV13855_GAIN_DEFAULT 0x80
#define OV13855_REG_TEST_PATTERN 0x5e00
#define OV13855_TEST_PATTERN_ENABLE 0x80
#define OV13855_TEST_PATTERN_DISABLE 0x0
#define OV13855_REG_VTS 0x380e
#define REG_NULL 0xFFFF
#define OV13855_REG_VALUE_08BIT 1
#define OV13855_REG_VALUE_16BIT 2
#define OV13855_REG_VALUE_24BIT 3
#define OV13855_LANES 4
#define OV13855_BITS_PER_SAMPLE 10
#define OV13855_CHIP_REVISION_REG 0x302A
#define OF_CAMERA_PINCTRL_STATE_DEFAULT "rockchip,camera_default"
#define OF_CAMERA_PINCTRL_STATE_SLEEP "rockchip,camera_sleep"
#define OV13855_NAME "ov13855"
#define OV13855_MEDIA_BUS_FMT MEDIA_BUS_FMT_SBGGR10_1X10
static const char * const ov13855_supply_names[] = {
"avdd", /* Analog power */
"dovdd", /* Digital I/O power */
"dvdd", /* Digital core power */
};
#define OV13855_NUM_SUPPLIES ARRAY_SIZE(ov13855_supply_names)
struct regval {
u16 addr;
u8 val;
};
struct ov13855_mode {
u32 width;
u32 height;
struct v4l2_fract max_fps;
u32 hts_def;
u32 vts_def;
u32 exp_def;
u32 link_freq_idx;
u32 bpp;
const struct regval *reg_list;
};
struct ov13855 {
struct i2c_client *client;
struct clk *xvclk;
struct gpio_desc *power_gpio;
struct gpio_desc *reset_gpio;
struct gpio_desc *pwdn_gpio;
struct regulator_bulk_data supplies[OV13855_NUM_SUPPLIES];
struct pinctrl *pinctrl;
struct pinctrl_state *pins_default;
struct pinctrl_state *pins_sleep;
struct v4l2_subdev subdev;
struct media_pad pad;
struct v4l2_ctrl_handler ctrl_handler;
struct v4l2_ctrl *exposure;
struct v4l2_ctrl *anal_gain;
struct v4l2_ctrl *digi_gain;
struct v4l2_ctrl *hblank;
struct v4l2_ctrl *vblank;
struct v4l2_ctrl *pixel_rate;
struct v4l2_ctrl *link_freq;
struct v4l2_ctrl *test_pattern;
struct mutex mutex;
bool streaming;
bool power_on;
const struct ov13855_mode *cur_mode;
u32 module_index;
const char *module_facing;
const char *module_name;
const char *len_name;
};
#define to_ov13855(sd) container_of(sd, struct ov13855, subdev)
/*
* Xclk 24Mhz
*/
static const struct regval ov13855_global_regs[] = {
{0x0103, 0x01},
{0x0300, 0x02},
{0x0301, 0x00},
{0x0302, 0x5a},
{0x0303, 0x00},
{0x0304, 0x00},
{0x0305, 0x01},
{0x030b, 0x06},
{0x030c, 0x02},
{0x030d, 0x88},
{0x0312, 0x11},
{0x3022, 0x01},
{0x3013, 0x32},
{0x3016, 0x72},
{0x301b, 0xF0},
{0x301f, 0xd0},
{0x3106, 0x15},
{0x3107, 0x23},
{0x3500, 0x00},
{0x3501, 0x80},
{0x3502, 0x00},
{0x3508, 0x02},
{0x3509, 0x00},
{0x350a, 0x00},
{0x350e, 0x00},
{0x3510, 0x00},
{0x3511, 0x02},
{0x3512, 0x00},
{0x3600, 0x2b},
{0x3601, 0x52},
{0x3602, 0x60},
{0x3612, 0x05},
{0x3613, 0xa4},
{0x3620, 0x80},
{0x3621, 0x10},
{0x3622, 0x30},
{0x3624, 0x1c},
{0x3640, 0x10},
{0x3641, 0x70},
{0x3661, 0x80},
{0x3662, 0x12},
{0x3664, 0x73},
{0x3665, 0xa7},
{0x366e, 0xff},
{0x366f, 0xf4},
{0x3674, 0x00},
{0x3679, 0x0c},
{0x367f, 0x01},
{0x3680, 0x0c},
{0x3681, 0x50},
{0x3682, 0x50},
{0x3683, 0xa9},
{0x3684, 0xa9},
{0x3709, 0x5f},
{0x3714, 0x24},
{0x371a, 0x3e},
{0x3737, 0x04},
{0x3738, 0xcc},
{0x3739, 0x12},
{0x373d, 0x26},
{0x3764, 0x20},
{0x3765, 0x20},
{0x37a1, 0x36},
{0x37a8, 0x3b},
{0x37ab, 0x31},
{0x37c2, 0x04},
{0x37c3, 0xf1},
{0x37c5, 0x00},
{0x37d8, 0x03},
{0x37d9, 0x0c},
{0x37da, 0xc2},
{0x37dc, 0x02},
{0x37e0, 0x00},
{0x37e1, 0x0a},
{0x37e2, 0x14},
{0x37e3, 0x04},
{0x37e4, 0x2a},
{0x37e5, 0x03},
{0x37e6, 0x04},
{0x3800, 0x00},
{0x3801, 0x00},
{0x3802, 0x00},
{0x3803, 0x08},
{0x3804, 0x10},
{0x3805, 0x9f},
{0x3806, 0x0c},
{0x3807, 0x57},
{0x3808, 0x10},
{0x3809, 0x80},
{0x380a, 0x0c},
{0x380b, 0x40},
{0x380c, 0x04},
{0x380d, 0x62},
{0x380e, 0x0c},
{0x380f, 0x8e},
{0x3811, 0x10},
{0x3813, 0x08},
{0x3814, 0x01},
{0x3815, 0x01},
{0x3816, 0x01},
{0x3817, 0x01},
{0x3820, 0xa8},
{0x3821, 0x00},
{0x3822, 0xc2},
{0x3823, 0x18},
{0x3826, 0x11},
{0x3827, 0x1c},
{0x3829, 0x03},
{0x3832, 0x00},
{0x3c80, 0x00},
{0x3c87, 0x01},
{0x3c8c, 0x19},
{0x3c8d, 0x1c},
{0x3c90, 0x00},
{0x3c91, 0x00},
{0x3c92, 0x00},
{0x3c93, 0x00},
{0x3c94, 0x40},
{0x3c95, 0x54},
{0x3c96, 0x34},
{0x3c97, 0x04},
{0x3c98, 0x00},
{0x3d8c, 0x73},
{0x3d8d, 0xc0},
{0x3f00, 0x0b},
{0x3f03, 0x00},
{0x4001, 0xe0},
{0x4008, 0x00},
{0x4009, 0x0f},
{0x4011, 0xf0},
{0x4050, 0x04},
{0x4051, 0x0b},
{0x4052, 0x00},
{0x4053, 0x80},
{0x4054, 0x00},
{0x4055, 0x80},
{0x4056, 0x00},
{0x4057, 0x80},
{0x4058, 0x00},
{0x4059, 0x80},
{0x405e, 0x00},
{0x4500, 0x07},
{0x4503, 0x00},
{0x450a, 0x04},
{0x4809, 0x04},
{0x480c, 0x12},
{0x481f, 0x30},
{0x4833, 0x10},
{0x4837, 0x0e},
{0x4902, 0x01},
{0x4d00, 0x03},
{0x4d01, 0xc9},
{0x4d02, 0xbc},
{0x4d03, 0xd7},
{0x4d04, 0xf0},
{0x4d05, 0xa2},
{0x5000, 0xff},
{0x5001, 0x07},
{0x5040, 0x39},
{0x5041, 0x10},
{0x5042, 0x10},
{0x5043, 0x84},
{0x5044, 0x62},
{0x5180, 0x00},
{0x5181, 0x10},
{0x5182, 0x02},
{0x5183, 0x0f},
{0x5200, 0x1b},
{0x520b, 0x07},
{0x520c, 0x0f},
{0x5300, 0x04},
{0x5301, 0x0C},
{0x5302, 0x0C},
{0x5303, 0x0f},
{0x5304, 0x00},
{0x5305, 0x70},
{0x5306, 0x00},
{0x5307, 0x80},
{0x5308, 0x00},
{0x5309, 0xa5},
{0x530a, 0x00},
{0x530b, 0xd3},
{0x530c, 0x00},
{0x530d, 0xf0},
{0x530e, 0x01},
{0x530f, 0x10},
{0x5310, 0x01},
{0x5311, 0x20},
{0x5312, 0x01},
{0x5313, 0x20},
{0x5314, 0x01},
{0x5315, 0x20},
{0x5316, 0x08},
{0x5317, 0x08},
{0x5318, 0x10},
{0x5319, 0x88},
{0x531a, 0x88},
{0x531b, 0xa9},
{0x531c, 0xaa},
{0x531d, 0x0a},
{0x5405, 0x02},
{0x5406, 0x67},
{0x5407, 0x01},
{0x5408, 0x4a},
{REG_NULL, 0x00},
};
#ifdef DEBUG
/*
* Xclk 24Mhz
* max_framerate 30fps
* mipi_datarate per lane 540Mbps
*/
static const struct regval ov13855_2112x1568_60fps_regs[] = {
{0x0300, 0x02},
{0x0301, 0x00},
{0x0302, 0x5a},
{0x0303, 0x01},
{0x0304, 0x00},
{0x0305, 0x01},
{0x3022, 0x01},
{0x3013, 0x32},
{0x3016, 0x72},
{0x301b, 0xf0},
{0x301f, 0xd0},
{0x3106, 0x15},
{0x3107, 0x23},
{0x3500, 0x00},
{0x3501, 0x64},
{0x3502, 0x00},
{0x3622, 0x30},
{0x3624, 0x1c},
{0x3662, 0x10},
{0x3709, 0x5f},
{0x3714, 0x28},
{0x3737, 0x08},
{0x3739, 0x20},
{0x37a1, 0x36},
{0x37a8, 0x3b},
{0x37ab, 0x31},
{0x37c2, 0x14},
{0x37d9, 0x0c},
{0x37e1, 0x0a},
{0x37e2, 0x14},
{0x37e3, 0x08},
{0x37e4, 0x38},
{0x37e5, 0x03},
{0x37e6, 0x08},
{0x3800, 0x00},
{0x3801, 0x00},
{0x3802, 0x00},
{0x3803, 0x08},
{0x3804, 0x10},
{0x3805, 0x9f},
{0x3806, 0x0c},
{0x3807, 0x4f},
{0x3808, 0x08},
{0x3809, 0x40},
{0x380a, 0x06},
{0x380b, 0x20},
{0x380c, 0x04},
{0x380d, 0x62},
{0x380e, 0x0c},
{0x380f, 0x89},
{0x3811, 0x08},
{0x3812, 0x00},
{0x3813, 0x02},
{0x3814, 0x03},
{0x3815, 0x01},
{0x3816, 0x03},
{0x3817, 0x01},
{0x3820, 0xab},
{0x3821, 0x00},
{0x3826, 0x04},
{0x3827, 0x90},
{0x3829, 0x07},
{0x3f03, 0x00},
{0x4009, 0x0d},
{0x4011, 0xf0},
{0x4050, 0x04},
{0x4051, 0x0b},
{0x4500, 0x07},
{0x4837, 0x1c},
{0x4902, 0x01},
{0x4d00, 0x03},
{0x4d01, 0xc9},
{0x4d02, 0xbc},
{0x4d03, 0xd7},
{0x4d04, 0xf0},
{0x4d05, 0xa2},
{0x5000, 0xff},
{0x5041, 0x10},
{0x5042, 0x10},
{0x5043, 0x84},
{0x5044, 0x62},
{0x5300, 0x04},
{0x5301, 0x0C},
{0x5302, 0x0C},
{0x5303, 0x0f},
{0x5305, 0x70},
{0x5307, 0x80},
{0x5309, 0xa5},
{0x530b, 0xd3},
{0x5319, 0x88},
{0x531a, 0x88},
{0x531b, 0xa9},
{0x531c, 0xaa},
{0x531d, 0x0a},
{0x5405, 0x02},
{0x5406, 0x67},
{0x5407, 0x01},
{0x5408, 0x4a},
{REG_NULL, 0x00},
};
/*
* Xclk 24Mhz
* max_framerate 15fps
* mipi_datarate per lane 1080Mbps
*/
static const struct regval ov13855_4224x3136_15fps_regs[] = {
{0x0300, 0x02},
{0x0301, 0x00},
{0x0302, 0x5a},
{0x0303, 0x00},
{0x0304, 0x00},
{0x0305, 0x01},
{0x030b, 0x06},
{0x030c, 0x02},
{0x030d, 0x88},
{0x0312, 0x11},
{0x3022, 0x01},
{0x3012, 0x40},
{0x3013, 0x72},
{0x3016, 0x72},
{0x301b, 0xF0},
{0x301f, 0xd0},
{0x3106, 0x15},
{0x3107, 0x23},
{0x3500, 0x00},
{0x3501, 0x80},
{0x3502, 0x00},
{0x3508, 0x02},
{0x3509, 0x00},
{0x350a, 0x00},
{0x350e, 0x00},
{0x3510, 0x00},
{0x3511, 0x02},
{0x3512, 0x00},
{0x3600, 0x2b},
{0x3601, 0x52},
{0x3602, 0x60},
{0x3612, 0x05},
{0x3613, 0xa4},
{0x3620, 0x80},
{0x3621, 0x10},
{0x3622, 0x30},
{0x3624, 0x1c},
{0x3640, 0x10},
{0x3641, 0x70},
{0x3660, 0x04},
{0x3661, 0x80},
{0x3662, 0x12},
{0x3664, 0x73},
{0x3665, 0xa7},
{0x366e, 0xff},
{0x366f, 0xf4},
{0x3674, 0x00},
{0x3679, 0x0c},
{0x367f, 0x01},
{0x3680, 0x0c},
{0x3681, 0x50},
{0x3682, 0x50},
{0x3683, 0xa9},
{0x3684, 0xa9},
{0x3706, 0x40},
{0x3709, 0x5f},
{0x3714, 0x24},
{0x371a, 0x3e},
{0x3737, 0x04},
{0x3738, 0xcc},
{0x3739, 0x12},
{0x373d, 0x26},
{0x3764, 0x20},
{0x3765, 0x20},
{0x37a1, 0x36},
{0x37a8, 0x3b},
{0x37ab, 0x31},
{0x37c2, 0x04},
{0x37c3, 0xf1},
{0x37c5, 0x00},
{0x37d8, 0x03},
{0x37d9, 0x0c},
{0x37da, 0xc2},
{0x37dc, 0x02},
{0x37e0, 0x00},
{0x37e1, 0x0a},
{0x37e2, 0x14},
{0x37e3, 0x04},
{0x37e4, 0x2A},
{0x37e5, 0x03},
{0x37e6, 0x04},
{0x3800, 0x00},
{0x3801, 0x00},
{0x3802, 0x00},
{0x3803, 0x08},
{0x3804, 0x10},
{0x3805, 0x9f},
{0x3806, 0x0c},
{0x3807, 0x57},
{0x3808, 0x10},
{0x3809, 0x80},
{0x380a, 0x0c},
{0x380b, 0x40},
{0x380c, 0x04},
{0x380d, 0x62},
{0x380e, 0x0c},
{0x380f, 0x8e},
{0x3811, 0x10},
{0x3813, 0x08},
{0x3814, 0x01},
{0x3815, 0x01},
{0x3816, 0x01},
{0x3817, 0x01},
{0x3820, 0xa8},
{0x3821, 0x00},
{0x3822, 0xd2},
{0x3823, 0x18},
{0x3826, 0x11},
{0x3827, 0x1c},
{0x3829, 0x03},
{0x3832, 0x00},
{0x3c80, 0x00},
{0x3c87, 0x01},
{0x3c8c, 0x19},
{0x3c8d, 0x1c},
{0x3c90, 0x00},
{0x3c91, 0x00},
{0x3c92, 0x00},
{0x3c93, 0x00},
{0x3c94, 0x40},
{0x3c95, 0x54},
{0x3c96, 0x34},
{0x3c97, 0x04},
{0x3c98, 0x00},
{0x3d8c, 0x73},
{0x3d8d, 0xc0},
{0x3f00, 0x0b},
{0x3f03, 0x00},
{0x4001, 0xe0},
{0x4008, 0x00},
{0x4009, 0x0f},
{0x4011, 0xf0},
{0x4017, 0x08},
{0x4050, 0x04},
{0x4051, 0x0b},
{0x4052, 0x00},
{0x4053, 0x80},
{0x4054, 0x00},
{0x4055, 0x80},
{0x4056, 0x00},
{0x4057, 0x80},
{0x4058, 0x00},
{0x4059, 0x80},
{0x405e, 0x00},
{0x4500, 0x07},
{0x4503, 0x00},
{0x450a, 0x04},
{0x4800, 0x60},
{0x4809, 0x04},
{0x480c, 0x12},
{0x481f, 0x30},
{0x4833, 0x10},
{0x4837, 0x0e},
{0x4902, 0x01},
{0x4d00, 0x03},
{0x4d01, 0xc9},
{0x4d02, 0xbc},
{0x4d03, 0xd7},
{0x4d04, 0xf0},
{0x4d05, 0xa2},
{0x5000, 0xff},
{0x5001, 0x07},
{0x5040, 0x39},
{0x5041, 0x10},
{0x5042, 0x10},
{0x5043, 0x84},
{0x5044, 0x62},
{0x5180, 0x00},
{0x5181, 0x10},
{0x5182, 0x02},
{0x5183, 0x0f},
{0x5200, 0x1b},
{0x520b, 0x07},
{0x520c, 0x0f},
{0x5300, 0x04},
{0x5301, 0x0C},
{0x5302, 0x0C},
{0x5303, 0x0f},
{0x5304, 0x00},
{0x5305, 0x70},
{0x5306, 0x00},
{0x5307, 0x80},
{0x5308, 0x00},
{0x5309, 0xa5},
{0x530a, 0x00},
{0x530b, 0xd3},
{0x530c, 0x00},
{0x530d, 0xf0},
{0x530e, 0x01},
{0x530f, 0x10},
{0x5310, 0x01},
{0x5311, 0x20},
{0x5312, 0x01},
{0x5313, 0x20},
{0x5314, 0x01},
{0x5315, 0x20},
{0x5316, 0x08},
{0x5317, 0x08},
{0x5318, 0x10},
{0x5319, 0x88},
{0x531a, 0x88},
{0x531b, 0xa9},
{0x531c, 0xaa},
{0x531d, 0x0a},
{0x5405, 0x02},
{0x5406, 0x67},
{0x5407, 0x01},
{0x5408, 0x4a},
{0x0100, 0x01},
{0x0100, 0x00},
{0x380c, 0x08},
{0x380d, 0xc4},
{0x0303, 0x01},
{0x4837, 0x1c},
//{0x0100, 0x01},
{REG_NULL, 0x00},
};
#endif
/*
* Xclk 24Mhz
* max_framerate 30fps
* mipi_datarate per lane 1080Mbps
*/
static const struct regval ov13855_4224x3136_30fps_regs[] = {
{0x0300, 0x02},
{0x0301, 0x00},
{0x0302, 0x5a},
{0x0303, 0x00},
{0x0304, 0x00},
{0x0305, 0x01},
{0x030b, 0x06},
{0x030c, 0x02},
{0x030d, 0x88},
{0x0312, 0x11},
{0x3022, 0x01},
{0x3012, 0x40},
{0x3013, 0x72},
{0x3016, 0x72},
{0x301b, 0xF0},
{0x301f, 0xd0},
{0x3106, 0x15},
{0x3107, 0x23},
{0x3500, 0x00},
{0x3501, 0x80},
{0x3502, 0x00},
{0x3508, 0x02},
{0x3509, 0x00},
{0x350a, 0x00},
{0x350e, 0x00},
{0x3510, 0x00},
{0x3511, 0x02},
{0x3512, 0x00},
{0x3600, 0x2b},
{0x3601, 0x52},
{0x3602, 0x60},
{0x3612, 0x05},
{0x3613, 0xa4},
{0x3620, 0x80},
{0x3621, 0x10},
{0x3622, 0x30},
{0x3624, 0x1c},
{0x3640, 0x10},
{0x3641, 0x70},
{0x3660, 0x04},
{0x3661, 0x80},
{0x3662, 0x12},
{0x3664, 0x73},
{0x3665, 0xa7},
{0x366e, 0xff},
{0x366f, 0xf4},
{0x3674, 0x00},
{0x3679, 0x0c},
{0x367f, 0x01},
{0x3680, 0x0c},
{0x3681, 0x50},
{0x3682, 0x50},
{0x3683, 0xa9},
{0x3684, 0xa9},
{0x3706, 0x40},
{0x3709, 0x5f},
{0x3714, 0x24},
{0x371a, 0x3e},
{0x3737, 0x04},
{0x3738, 0xcc},
{0x3739, 0x12},
{0x373d, 0x26},
{0x3764, 0x20},
{0x3765, 0x20},
{0x37a1, 0x36},
{0x37a8, 0x3b},
{0x37ab, 0x31},
{0x37c2, 0x04},
{0x37c3, 0xf1},
{0x37c5, 0x00},
{0x37d8, 0x03},
{0x37d9, 0x0c},
{0x37da, 0xc2},
{0x37dc, 0x02},
{0x37e0, 0x00},
{0x37e1, 0x0a},
{0x37e2, 0x14},
{0x37e3, 0x04},
{0x37e4, 0x2A},
{0x37e5, 0x03},
{0x37e6, 0x04},
{0x3800, 0x00},
{0x3801, 0x00},
{0x3802, 0x00},
{0x3803, 0x08},
{0x3804, 0x10},
{0x3805, 0x9f},
{0x3806, 0x0c},
{0x3807, 0x57},
{0x3808, 0x10},
{0x3809, 0x80},
{0x380a, 0x0c},
{0x380b, 0x40},
{0x380c, 0x04},
{0x380d, 0x62},
{0x380e, 0x0c},
{0x380f, 0x8e},
{0x3811, 0x10},
{0x3813, 0x08},
{0x3814, 0x01},
{0x3815, 0x01},
{0x3816, 0x01},
{0x3817, 0x01},
{0x3820, 0xa8},
{0x3821, 0x00},
{0x3822, 0xd2},
{0x3823, 0x18},
{0x3826, 0x11},
{0x3827, 0x1c},
{0x3829, 0x03},
{0x3832, 0x00},
{0x3c80, 0x00},
{0x3c87, 0x01},
{0x3c8c, 0x19},
{0x3c8d, 0x1c},
{0x3c90, 0x00},
{0x3c91, 0x00},
{0x3c92, 0x00},
{0x3c93, 0x00},
{0x3c94, 0x40},
{0x3c95, 0x54},
{0x3c96, 0x34},
{0x3c97, 0x04},
{0x3c98, 0x00},
{0x3d8c, 0x73},
{0x3d8d, 0xc0},
{0x3f00, 0x0b},
{0x3f03, 0x00},
{0x4001, 0xe0},
{0x4008, 0x00},
{0x4009, 0x0f},
{0x4011, 0xf0},
{0x4017, 0x08},
{0x4050, 0x04},
{0x4051, 0x0b},
{0x4052, 0x00},
{0x4053, 0x80},
{0x4054, 0x00},
{0x4055, 0x80},
{0x4056, 0x00},
{0x4057, 0x80},
{0x4058, 0x00},
{0x4059, 0x80},
{0x405e, 0x00},
{0x4500, 0x07},
{0x4503, 0x00},
{0x450a, 0x04},
{0x4800, 0x60},
{0x4809, 0x04},
{0x480c, 0x12},
{0x481f, 0x30},
{0x4833, 0x10},
{0x4837, 0x0e},
{0x4902, 0x01},
{0x4d00, 0x03},
{0x4d01, 0xc9},
{0x4d02, 0xbc},
{0x4d03, 0xd7},
{0x4d04, 0xf0},
{0x4d05, 0xa2},
{0x5000, 0xff},
{0x5001, 0x07},
{0x5040, 0x39},
{0x5041, 0x10},
{0x5042, 0x10},
{0x5043, 0x84},
{0x5044, 0x62},
{0x5180, 0x00},
{0x5181, 0x10},
{0x5182, 0x02},
{0x5183, 0x0f},
{0x5200, 0x1b},
{0x520b, 0x07},
{0x520c, 0x0f},
{0x5300, 0x04},
{0x5301, 0x0C},
{0x5302, 0x0C},
{0x5303, 0x0f},
{0x5304, 0x00},
{0x5305, 0x70},
{0x5306, 0x00},
{0x5307, 0x80},
{0x5308, 0x00},
{0x5309, 0xa5},
{0x530a, 0x00},
{0x530b, 0xd3},
{0x530c, 0x00},
{0x530d, 0xf0},
{0x530e, 0x01},
{0x530f, 0x10},
{0x5310, 0x01},
{0x5311, 0x20},
{0x5312, 0x01},
{0x5313, 0x20},
{0x5314, 0x01},
{0x5315, 0x20},
{0x5316, 0x08},
{0x5317, 0x08},
{0x5318, 0x10},
{0x5319, 0x88},
{0x531a, 0x88},
{0x531b, 0xa9},
{0x531c, 0xaa},
{0x531d, 0x0a},
{0x5405, 0x02},
{0x5406, 0x67},
{0x5407, 0x01},
{0x5408, 0x4a},
{0x0100, 0x01},
{0x0100, 0x00},
{0x380c, 0x04},
{0x380d, 0x62},
{0x0303, 0x00},
{0x4837, 0x0e},
//{0x0100, 0x01},
{REG_NULL, 0x00},
};
static const struct ov13855_mode supported_modes[] = {
{
.width = 4224,
.height = 3136,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.exp_def = 0x0800,
.hts_def = 0x0462,
.vts_def = 0x0c8e,
.bpp = 10,
.reg_list = ov13855_4224x3136_30fps_regs,
.link_freq_idx = 0,
},
#ifdef DEBUG
{
.width = 2112,
.height = 1568,
.max_fps = {
.numerator = 10000,
.denominator = 600000,
},
.exp_def = 0x0400,
.hts_def = 0x0462,
.vts_def = 0x0c89,
.bpp = 10,
.reg_list = ov13855_2112x1568_60fps_regs,
.link_freq_idx = 1,
},
{
.width = 4224,
.height = 3136,
.max_fps = {
.numerator = 10000,
.denominator = 150000,
},
.exp_def = 0x0800,
.hts_def = 0x08c4,
.vts_def = 0x0c8e,
.bpp = 10,
.reg_list = ov13855_4224x3136_15fps_regs,
.link_freq_idx = 0,
},
#endif
};
static const s64 link_freq_items[] = {
OV13855_LINK_FREQ_540MHZ,
OV13855_LINK_FREQ_270MHZ,
};
static const char * const ov13855_test_pattern_menu[] = {
"Disabled",
"Vertical Color Bar Type 1",
"Vertical Color Bar Type 2",
"Vertical Color Bar Type 3",
"Vertical Color Bar Type 4"
};
/* Write registers up to 4 at a time */
static int ov13855_write_reg(struct i2c_client *client, u16 reg,
u32 len, u32 val)
{
u32 buf_i, val_i;
u8 buf[6];
u8 *val_p;
__be32 val_be;
dev_dbg(&client->dev, "write reg(0x%x val:0x%x)!\n", reg, val);
if (len > 4)
return -EINVAL;
buf[0] = reg >> 8;
buf[1] = reg & 0xff;
val_be = cpu_to_be32(val);
val_p = (u8 *)&val_be;
buf_i = 2;
val_i = 4 - len;
while (val_i < 4)
buf[buf_i++] = val_p[val_i++];
if (i2c_master_send(client, buf, len + 2) != len + 2)
return -EIO;
return 0;
}
static int ov13855_write_array(struct i2c_client *client,
const struct regval *regs)
{
u32 i;
int ret = 0;
for (i = 0; ret == 0 && regs[i].addr != REG_NULL; i++)
ret = ov13855_write_reg(client, regs[i].addr,
OV13855_REG_VALUE_08BIT,
regs[i].val);
return ret;
}
/* Read registers up to 4 at a time */
static int ov13855_read_reg(struct i2c_client *client, u16 reg,
unsigned int len, u32 *val)
{
struct i2c_msg msgs[2];
u8 *data_be_p;
__be32 data_be = 0;
__be16 reg_addr_be = cpu_to_be16(reg);
int ret;
if (len > 4 || !len)
return -EINVAL;
data_be_p = (u8 *)&data_be;
/* Write register address */
msgs[0].addr = client->addr;
msgs[0].flags = 0;
msgs[0].len = 2;
msgs[0].buf = (u8 *)®_addr_be;
/* Read data from register */
msgs[1].addr = client->addr;
msgs[1].flags = I2C_M_RD;
msgs[1].len = len;
msgs[1].buf = &data_be_p[4 - len];
ret = i2c_transfer(client->adapter, msgs, ARRAY_SIZE(msgs));
if (ret != ARRAY_SIZE(msgs))
return -EIO;
*val = be32_to_cpu(data_be);
return 0;
}
static int ov13855_get_reso_dist(const struct ov13855_mode *mode,
struct v4l2_mbus_framefmt *framefmt)
{
return abs(mode->width - framefmt->width) +
abs(mode->height - framefmt->height);
}
static const struct ov13855_mode *
ov13855_find_best_fit(struct v4l2_subdev_format *fmt)
{
struct v4l2_mbus_framefmt *framefmt = &fmt->format;
int dist;
int cur_best_fit = 0;
int cur_best_fit_dist = -1;
unsigned int i;
for (i = 0; i < ARRAY_SIZE(supported_modes); i++) {
dist = ov13855_get_reso_dist(&supported_modes[i], framefmt);
if (cur_best_fit_dist == -1 || dist < cur_best_fit_dist) {
cur_best_fit_dist = dist;
cur_best_fit = i;
}
}
return &supported_modes[cur_best_fit];
}
static int ov13855_set_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct ov13855 *ov13855 = to_ov13855(sd);
const struct ov13855_mode *mode;
s64 h_blank, vblank_def;
u64 pixel_rate = 0;
u32 lane_num = OV13855_LANES;
mutex_lock(&ov13855->mutex);
mode = ov13855_find_best_fit(fmt);
fmt->format.code = OV13855_MEDIA_BUS_FMT;
fmt->format.width = mode->width;
fmt->format.height = mode->height;
fmt->format.field = V4L2_FIELD_NONE;
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
*v4l2_subdev_get_try_format(sd, cfg, fmt->pad) = fmt->format;
#else
mutex_unlock(&ov13855->mutex);
return -ENOTTY;
#endif
} else {
ov13855->cur_mode = mode;
h_blank = mode->hts_def - mode->width;
__v4l2_ctrl_modify_range(ov13855->hblank, h_blank,
h_blank, 1, h_blank);
vblank_def = mode->vts_def - mode->height;
__v4l2_ctrl_modify_range(ov13855->vblank, vblank_def,
OV13855_VTS_MAX - mode->height,
1, vblank_def);
__v4l2_ctrl_s_ctrl(ov13855->vblank, vblank_def);
pixel_rate = (u32)link_freq_items[mode->link_freq_idx] / mode->bpp * 2 * lane_num;
__v4l2_ctrl_s_ctrl_int64(ov13855->pixel_rate,
pixel_rate);
__v4l2_ctrl_s_ctrl(ov13855->link_freq,
mode->link_freq_idx);
}
dev_info(&ov13855->client->dev, "%s: mode->link_freq_idx(%d)",
__func__, mode->link_freq_idx);
mutex_unlock(&ov13855->mutex);
return 0;
}
static int ov13855_get_fmt(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_format *fmt)
{
struct ov13855 *ov13855 = to_ov13855(sd);
const struct ov13855_mode *mode = ov13855->cur_mode;
mutex_lock(&ov13855->mutex);
if (fmt->which == V4L2_SUBDEV_FORMAT_TRY) {
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
fmt->format = *v4l2_subdev_get_try_format(sd, cfg, fmt->pad);
#else
mutex_unlock(&ov13855->mutex);
return -ENOTTY;
#endif
} else {
fmt->format.width = mode->width;
fmt->format.height = mode->height;
fmt->format.code = OV13855_MEDIA_BUS_FMT;
fmt->format.field = V4L2_FIELD_NONE;
}
mutex_unlock(&ov13855->mutex);
return 0;
}
static int ov13855_enum_mbus_code(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_mbus_code_enum *code)
{
if (code->index != 0)
return -EINVAL;
code->code = OV13855_MEDIA_BUS_FMT;
return 0;
}
static int ov13855_enum_frame_sizes(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_size_enum *fse)
{
if (fse->index >= ARRAY_SIZE(supported_modes))
return -EINVAL;
if (fse->code != OV13855_MEDIA_BUS_FMT)
return -EINVAL;
fse->min_width = supported_modes[fse->index].width;
fse->max_width = supported_modes[fse->index].width;
fse->max_height = supported_modes[fse->index].height;
fse->min_height = supported_modes[fse->index].height;
return 0;
}
static int ov13855_enable_test_pattern(struct ov13855 *ov13855, u32 pattern)
{
u32 val;
if (pattern)
val = (pattern - 1) | OV13855_TEST_PATTERN_ENABLE;
else
val = OV13855_TEST_PATTERN_DISABLE;
return ov13855_write_reg(ov13855->client,
OV13855_REG_TEST_PATTERN,
OV13855_REG_VALUE_08BIT,
val);
}
static int ov13855_g_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_frame_interval *fi)
{
struct ov13855 *ov13855 = to_ov13855(sd);
const struct ov13855_mode *mode = ov13855->cur_mode;
mutex_lock(&ov13855->mutex);
fi->interval = mode->max_fps;
mutex_unlock(&ov13855->mutex);
return 0;
}
static void ov13855_get_module_inf(struct ov13855 *ov13855,
struct rkmodule_inf *inf)
{
memset(inf, 0, sizeof(*inf));
strscpy(inf->base.sensor, OV13855_NAME, sizeof(inf->base.sensor));
strscpy(inf->base.module, ov13855->module_name,
sizeof(inf->base.module));
strscpy(inf->base.lens, ov13855->len_name, sizeof(inf->base.lens));
}
static long ov13855_ioctl(struct v4l2_subdev *sd, unsigned int cmd, void *arg)
{
struct ov13855 *ov13855 = to_ov13855(sd);
long ret = 0;
u32 stream = 0;
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
ov13855_get_module_inf(ov13855, (struct rkmodule_inf *)arg);
break;
case RKMODULE_SET_QUICK_STREAM:
stream = *((u32 *)arg);
if (stream)
ret = ov13855_write_reg(ov13855->client,
OV13855_REG_CTRL_MODE,
OV13855_REG_VALUE_08BIT,
OV13855_MODE_STREAMING);
else
ret = ov13855_write_reg(ov13855->client,
OV13855_REG_CTRL_MODE,
OV13855_REG_VALUE_08BIT,
OV13855_MODE_SW_STANDBY);
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#ifdef CONFIG_COMPAT
static long ov13855_compat_ioctl32(struct v4l2_subdev *sd,
unsigned int cmd, unsigned long arg)
{
void __user *up = compat_ptr(arg);
struct rkmodule_inf *inf;
struct rkmodule_awb_cfg *cfg;
long ret = 0;
u32 stream = 0;
switch (cmd) {
case RKMODULE_GET_MODULE_INFO:
inf = kzalloc(sizeof(*inf), GFP_KERNEL);
if (!inf) {
ret = -ENOMEM;
return ret;
}
ret = ov13855_ioctl(sd, cmd, inf);
if (!ret) {
ret = copy_to_user(up, inf, sizeof(*inf));
if (ret)
ret = -EFAULT;
}
kfree(inf);
break;
case RKMODULE_AWB_CFG:
cfg = kzalloc(sizeof(*cfg), GFP_KERNEL);
if (!cfg) {
ret = -ENOMEM;
return ret;
}
ret = copy_from_user(cfg, up, sizeof(*cfg));
if (!ret)
ret = ov13855_ioctl(sd, cmd, cfg);
else
ret = -EFAULT;
kfree(cfg);
break;
case RKMODULE_SET_QUICK_STREAM:
ret = copy_from_user(&stream, up, sizeof(u32));
if (!ret)
ret = ov13855_ioctl(sd, cmd, &stream);
else
ret = -EFAULT;
break;
default:
ret = -ENOIOCTLCMD;
break;
}
return ret;
}
#endif
static int __ov13855_start_stream(struct ov13855 *ov13855)
{
int ret;
ret = ov13855_write_array(ov13855->client, ov13855->cur_mode->reg_list);
if (ret)
return ret;
/* In case these controls are set before streaming */
mutex_unlock(&ov13855->mutex);
ret = v4l2_ctrl_handler_setup(&ov13855->ctrl_handler);
mutex_lock(&ov13855->mutex);
if (ret)
return ret;
return ov13855_write_reg(ov13855->client,
OV13855_REG_CTRL_MODE,
OV13855_REG_VALUE_08BIT,
OV13855_MODE_STREAMING);
}
static int __ov13855_stop_stream(struct ov13855 *ov13855)
{
return ov13855_write_reg(ov13855->client,
OV13855_REG_CTRL_MODE,
OV13855_REG_VALUE_08BIT,
OV13855_MODE_SW_STANDBY);
}
static int ov13855_s_stream(struct v4l2_subdev *sd, int on)
{
struct ov13855 *ov13855 = to_ov13855(sd);
struct i2c_client *client = ov13855->client;
int ret = 0;
dev_info(&client->dev, "%s: on: %d, %dx%d@%d\n", __func__, on,
ov13855->cur_mode->width,
ov13855->cur_mode->height,
DIV_ROUND_CLOSEST(ov13855->cur_mode->max_fps.denominator,
ov13855->cur_mode->max_fps.numerator));
mutex_lock(&ov13855->mutex);
on = !!on;
if (on == ov13855->streaming)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ret = __ov13855_start_stream(ov13855);
if (ret) {
v4l2_err(sd, "start stream failed while write regs\n");
pm_runtime_put(&client->dev);
goto unlock_and_return;
}
} else {
__ov13855_stop_stream(ov13855);
pm_runtime_put(&client->dev);
}
ov13855->streaming = on;
unlock_and_return:
mutex_unlock(&ov13855->mutex);
return ret;
}
static int ov13855_s_power(struct v4l2_subdev *sd, int on)
{
struct ov13855 *ov13855 = to_ov13855(sd);
struct i2c_client *client = ov13855->client;
int ret = 0;
mutex_lock(&ov13855->mutex);
/* If the power state is not modified - no work to do. */
if (ov13855->power_on == !!on)
goto unlock_and_return;
if (on) {
ret = pm_runtime_get_sync(&client->dev);
if (ret < 0) {
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ret = ov13855_write_array(ov13855->client, ov13855_global_regs);
if (ret) {
v4l2_err(sd, "could not set init registers\n");
pm_runtime_put_noidle(&client->dev);
goto unlock_and_return;
}
ov13855->power_on = true;
} else {
pm_runtime_put(&client->dev);
ov13855->power_on = false;
}
unlock_and_return:
mutex_unlock(&ov13855->mutex);
return ret;
}
/* Calculate the delay in us by clock rate and clock cycles */
static inline u32 ov13855_cal_delay(u32 cycles)
{
return DIV_ROUND_UP(cycles, OV13855_XVCLK_FREQ / 1000 / 1000);
}
static int __ov13855_power_on(struct ov13855 *ov13855)
{
int ret;
u32 delay_us;
struct device *dev = &ov13855->client->dev;
if (!IS_ERR(ov13855->power_gpio))
gpiod_set_value_cansleep(ov13855->power_gpio, 1);
usleep_range(1000, 2000);
if (!IS_ERR_OR_NULL(ov13855->pins_default)) {
ret = pinctrl_select_state(ov13855->pinctrl,
ov13855->pins_default);
if (ret < 0)
dev_err(dev, "could not set pins\n");
}
ret = clk_set_rate(ov13855->xvclk, OV13855_XVCLK_FREQ);
if (ret < 0)
dev_warn(dev, "Failed to set xvclk rate (24MHz)\n");
if (clk_get_rate(ov13855->xvclk) != OV13855_XVCLK_FREQ)
dev_warn(dev, "xvclk mismatched, modes are based on 24MHz\n");
ret = clk_prepare_enable(ov13855->xvclk);
if (ret < 0) {
dev_err(dev, "Failed to enable xvclk\n");
return ret;
}
if (!IS_ERR(ov13855->reset_gpio))
gpiod_set_value_cansleep(ov13855->reset_gpio, 0);
ret = regulator_bulk_enable(OV13855_NUM_SUPPLIES, ov13855->supplies);
if (ret < 0) {
dev_err(dev, "Failed to enable regulators\n");
goto disable_clk;
}
if (!IS_ERR(ov13855->reset_gpio))
gpiod_set_value_cansleep(ov13855->reset_gpio, 1);
usleep_range(5000, 6000);
if (!IS_ERR(ov13855->pwdn_gpio))
gpiod_set_value_cansleep(ov13855->pwdn_gpio, 1);
/* 8192 cycles prior to first SCCB transaction */
delay_us = ov13855_cal_delay(8192);
usleep_range(delay_us * 2, delay_us * 3);
return 0;
disable_clk:
clk_disable_unprepare(ov13855->xvclk);
return ret;
}
static void __ov13855_power_off(struct ov13855 *ov13855)
{
int ret;
struct device *dev = &ov13855->client->dev;
if (!IS_ERR(ov13855->pwdn_gpio))
gpiod_set_value_cansleep(ov13855->pwdn_gpio, 0);
clk_disable_unprepare(ov13855->xvclk);
if (!IS_ERR(ov13855->reset_gpio))
gpiod_set_value_cansleep(ov13855->reset_gpio, 0);
if (!IS_ERR_OR_NULL(ov13855->pins_sleep)) {
ret = pinctrl_select_state(ov13855->pinctrl,
ov13855->pins_sleep);
if (ret < 0)
dev_dbg(dev, "could not set pins\n");
}
if (!IS_ERR(ov13855->power_gpio))
gpiod_set_value_cansleep(ov13855->power_gpio, 0);
regulator_bulk_disable(OV13855_NUM_SUPPLIES, ov13855->supplies);
}
static int ov13855_runtime_resume(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13855 *ov13855 = to_ov13855(sd);
return __ov13855_power_on(ov13855);
}
static int ov13855_runtime_suspend(struct device *dev)
{
struct i2c_client *client = to_i2c_client(dev);
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13855 *ov13855 = to_ov13855(sd);
__ov13855_power_off(ov13855);
return 0;
}
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
static int ov13855_open(struct v4l2_subdev *sd, struct v4l2_subdev_fh *fh)
{
struct ov13855 *ov13855 = to_ov13855(sd);
struct v4l2_mbus_framefmt *try_fmt =
v4l2_subdev_get_try_format(sd, fh->pad, 0);
const struct ov13855_mode *def_mode = &supported_modes[0];
mutex_lock(&ov13855->mutex);
/* Initialize try_fmt */
try_fmt->width = def_mode->width;
try_fmt->height = def_mode->height;
try_fmt->code = OV13855_MEDIA_BUS_FMT;
try_fmt->field = V4L2_FIELD_NONE;
mutex_unlock(&ov13855->mutex);
/* No crop or compose */
return 0;
}
#endif
static int ov13855_enum_frame_interval(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_frame_interval_enum *fie)
{
if (fie->index >= ARRAY_SIZE(supported_modes))
return -EINVAL;
if (fie->code != OV13855_MEDIA_BUS_FMT)
return -EINVAL;
fie->width = supported_modes[fie->index].width;
fie->height = supported_modes[fie->index].height;
fie->interval = supported_modes[fie->index].max_fps;
return 0;
}
static int ov13855_g_mbus_config(struct v4l2_subdev *sd, unsigned int pad,
struct v4l2_mbus_config *config)
{
if (2 == OV13855_LANES) {
config->type = V4L2_MBUS_CSI2_DPHY;
config->flags = V4L2_MBUS_CSI2_2_LANE |
V4L2_MBUS_CSI2_CHANNEL_0 |
V4L2_MBUS_CSI2_CONTINUOUS_CLOCK;
} else if (4 == OV13855_LANES) {
config->type = V4L2_MBUS_CSI2_DPHY;
config->flags = V4L2_MBUS_CSI2_4_LANE |
V4L2_MBUS_CSI2_CHANNEL_0 |
V4L2_MBUS_CSI2_CONTINUOUS_CLOCK;
}
return 0;
}
static int ov13855_get_selection(struct v4l2_subdev *sd,
struct v4l2_subdev_pad_config *cfg,
struct v4l2_subdev_selection *sel)
{
struct ov13855 *ov13855 = to_ov13855(sd);
if (sel->target == V4L2_SEL_TGT_CROP_BOUNDS) {
sel->r.left = 0;
sel->r.width = ov13855->cur_mode->width;
sel->r.top = 0;
sel->r.height = ov13855->cur_mode->height;
return 0;
}
return -EINVAL;
}
static const struct dev_pm_ops ov13855_pm_ops = {
SET_RUNTIME_PM_OPS(ov13855_runtime_suspend,
ov13855_runtime_resume, NULL)
};
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
static const struct v4l2_subdev_internal_ops ov13855_internal_ops = {
.open = ov13855_open,
};
#endif
static const struct v4l2_subdev_core_ops ov13855_core_ops = {
.s_power = ov13855_s_power,
.ioctl = ov13855_ioctl,
#ifdef CONFIG_COMPAT
.compat_ioctl32 = ov13855_compat_ioctl32,
#endif
};
static const struct v4l2_subdev_video_ops ov13855_video_ops = {
.s_stream = ov13855_s_stream,
.g_frame_interval = ov13855_g_frame_interval,
};
static const struct v4l2_subdev_pad_ops ov13855_pad_ops = {
.enum_mbus_code = ov13855_enum_mbus_code,
.enum_frame_size = ov13855_enum_frame_sizes,
.enum_frame_interval = ov13855_enum_frame_interval,
.get_fmt = ov13855_get_fmt,
.set_fmt = ov13855_set_fmt,
.get_selection = ov13855_get_selection,
.get_mbus_config = ov13855_g_mbus_config,
};
static const struct v4l2_subdev_ops ov13855_subdev_ops = {
.core = &ov13855_core_ops,
.video = &ov13855_video_ops,
.pad = &ov13855_pad_ops,
};
static int ov13855_set_ctrl(struct v4l2_ctrl *ctrl)
{
struct ov13855 *ov13855 = container_of(ctrl->handler,
struct ov13855, ctrl_handler);
struct i2c_client *client = ov13855->client;
s64 max;
int ret = 0;
/* Propagate change of current control to all related controls */
switch (ctrl->id) {
case V4L2_CID_VBLANK:
/* Update max exposure while meeting expected vblanking */
max = ov13855->cur_mode->height + ctrl->val - 4;
__v4l2_ctrl_modify_range(ov13855->exposure,
ov13855->exposure->minimum, max,
ov13855->exposure->step,
ov13855->exposure->default_value);
break;
}
if (!pm_runtime_get_if_in_use(&client->dev))
return 0;
switch (ctrl->id) {
case V4L2_CID_EXPOSURE:
/* 4 least significant bits of expsoure are fractional part */
ret = ov13855_write_reg(ov13855->client,
OV13855_REG_EXPOSURE,
OV13855_REG_VALUE_24BIT,
ctrl->val << 4);
break;
case V4L2_CID_ANALOGUE_GAIN:
ret = ov13855_write_reg(ov13855->client,
OV13855_REG_GAIN_H,
OV13855_REG_VALUE_08BIT,
(ctrl->val >> OV13855_GAIN_H_SHIFT) &
OV13855_GAIN_H_MASK);
ret |= ov13855_write_reg(ov13855->client,
OV13855_REG_GAIN_L,
OV13855_REG_VALUE_08BIT,
ctrl->val & OV13855_GAIN_L_MASK);
break;
case V4L2_CID_VBLANK:
ret = ov13855_write_reg(ov13855->client,
OV13855_REG_VTS,
OV13855_REG_VALUE_16BIT,
ctrl->val + ov13855->cur_mode->height);
break;
case V4L2_CID_TEST_PATTERN:
ret = ov13855_enable_test_pattern(ov13855, ctrl->val);
break;
default:
dev_warn(&client->dev, "%s Unhandled id:0x%x, val:0x%x\n",
__func__, ctrl->id, ctrl->val);
break;
}
pm_runtime_put(&client->dev);
return ret;
}
static const struct v4l2_ctrl_ops ov13855_ctrl_ops = {
.s_ctrl = ov13855_set_ctrl,
};
static int ov13855_initialize_controls(struct ov13855 *ov13855)
{
const struct ov13855_mode *mode;
struct v4l2_ctrl_handler *handler;
s64 exposure_max, vblank_def;
u32 h_blank;
int ret;
u64 dst_pixel_rate = 0;
u32 lane_num = OV13855_LANES;
handler = &ov13855->ctrl_handler;
mode = ov13855->cur_mode;
ret = v4l2_ctrl_handler_init(handler, 8);
if (ret)
return ret;
handler->lock = &ov13855->mutex;
ov13855->link_freq = v4l2_ctrl_new_int_menu(handler, NULL,
V4L2_CID_LINK_FREQ,
1, 0, link_freq_items);
dst_pixel_rate = (u32)link_freq_items[mode->link_freq_idx] / mode->bpp * 2 * lane_num;
ov13855->pixel_rate = v4l2_ctrl_new_std(handler, NULL,
V4L2_CID_PIXEL_RATE,
0, OV13855_PIXEL_RATE,
1, dst_pixel_rate);
__v4l2_ctrl_s_ctrl(ov13855->link_freq,
mode->link_freq_idx);
h_blank = mode->hts_def - mode->width;
ov13855->hblank = v4l2_ctrl_new_std(handler, NULL, V4L2_CID_HBLANK,
h_blank, h_blank, 1, h_blank);
if (ov13855->hblank)
ov13855->hblank->flags |= V4L2_CTRL_FLAG_READ_ONLY;
vblank_def = mode->vts_def - mode->height;
ov13855->vblank = v4l2_ctrl_new_std(handler, &ov13855_ctrl_ops,
V4L2_CID_VBLANK, vblank_def,
OV13855_VTS_MAX - mode->height,
1, vblank_def);
exposure_max = mode->vts_def - 4;
ov13855->exposure = v4l2_ctrl_new_std(handler, &ov13855_ctrl_ops,
V4L2_CID_EXPOSURE, OV13855_EXPOSURE_MIN,
exposure_max, OV13855_EXPOSURE_STEP,
mode->exp_def);
ov13855->anal_gain = v4l2_ctrl_new_std(handler, &ov13855_ctrl_ops,
V4L2_CID_ANALOGUE_GAIN, OV13855_GAIN_MIN,
OV13855_GAIN_MAX, OV13855_GAIN_STEP,
OV13855_GAIN_DEFAULT);
ov13855->test_pattern = v4l2_ctrl_new_std_menu_items(handler,
&ov13855_ctrl_ops, V4L2_CID_TEST_PATTERN,
ARRAY_SIZE(ov13855_test_pattern_menu) - 1,
0, 0, ov13855_test_pattern_menu);
if (handler->error) {
ret = handler->error;
dev_err(&ov13855->client->dev,
"Failed to init controls(%d)\n", ret);
goto err_free_handler;
}
ov13855->subdev.ctrl_handler = handler;
return 0;
err_free_handler:
v4l2_ctrl_handler_free(handler);
return ret;
}
static int ov13855_check_sensor_id(struct ov13855 *ov13855,
struct i2c_client *client)
{
struct device *dev = &ov13855->client->dev;
u32 id = 0;
int ret;
ret = ov13855_read_reg(client, OV13855_REG_CHIP_ID,
OV13855_REG_VALUE_24BIT, &id);
if (id != CHIP_ID) {
dev_err(dev, "Unexpected sensor id(%06x), ret(%d)\n", id, ret);
return -ENODEV;
}
ret = ov13855_read_reg(client, OV13855_CHIP_REVISION_REG,
OV13855_REG_VALUE_08BIT, &id);
if (ret) {
dev_err(dev, "Read chip revision register error\n");
return ret;
}
dev_info(dev, "Detected OV%06x sensor, REVISION 0x%x\n", CHIP_ID, id);
return 0;
}
static int ov13855_configure_regulators(struct ov13855 *ov13855)
{
unsigned int i;
for (i = 0; i < OV13855_NUM_SUPPLIES; i++)
ov13855->supplies[i].supply = ov13855_supply_names[i];
return devm_regulator_bulk_get(&ov13855->client->dev,
OV13855_NUM_SUPPLIES,
ov13855->supplies);
}
static int ov13855_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct device *dev = &client->dev;
struct device_node *node = dev->of_node;
struct ov13855 *ov13855;
struct v4l2_subdev *sd;
char facing[2];
int ret;
dev_info(dev, "driver version: %02x.%02x.%02x",
DRIVER_VERSION >> 16,
(DRIVER_VERSION & 0xff00) >> 8,
DRIVER_VERSION & 0x00ff);
ov13855 = devm_kzalloc(dev, sizeof(*ov13855), GFP_KERNEL);
if (!ov13855)
return -ENOMEM;
ret = of_property_read_u32(node, RKMODULE_CAMERA_MODULE_INDEX,
&ov13855->module_index);
ret |= of_property_read_string(node, RKMODULE_CAMERA_MODULE_FACING,
&ov13855->module_facing);
ret |= of_property_read_string(node, RKMODULE_CAMERA_MODULE_NAME,
&ov13855->module_name);
ret |= of_property_read_string(node, RKMODULE_CAMERA_LENS_NAME,
&ov13855->len_name);
if (ret) {
dev_err(dev, "could not get module information!\n");
return -EINVAL;
}
ov13855->client = client;
ov13855->cur_mode = &supported_modes[0];
ov13855->xvclk = devm_clk_get(dev, "xvclk");
if (IS_ERR(ov13855->xvclk)) {
dev_err(dev, "Failed to get xvclk\n");
return -EINVAL;
}
ov13855->power_gpio = devm_gpiod_get(dev, "power", GPIOD_OUT_LOW);
if (IS_ERR(ov13855->power_gpio))
dev_warn(dev, "Failed to get power-gpios, maybe no use\n");
ov13855->reset_gpio = devm_gpiod_get(dev, "reset", GPIOD_OUT_LOW);
if (IS_ERR(ov13855->reset_gpio))
dev_warn(dev, "Failed to get reset-gpios\n");
ov13855->pwdn_gpio = devm_gpiod_get(dev, "pwdn", GPIOD_OUT_LOW);
if (IS_ERR(ov13855->pwdn_gpio))
dev_warn(dev, "Failed to get pwdn-gpios\n");
ret = ov13855_configure_regulators(ov13855);
if (ret) {
dev_err(dev, "Failed to get power regulators\n");
return ret;
}
ov13855->pinctrl = devm_pinctrl_get(dev);
if (!IS_ERR(ov13855->pinctrl)) {
ov13855->pins_default =
pinctrl_lookup_state(ov13855->pinctrl,
OF_CAMERA_PINCTRL_STATE_DEFAULT);
if (IS_ERR(ov13855->pins_default))
dev_err(dev, "could not get default pinstate\n");
ov13855->pins_sleep =
pinctrl_lookup_state(ov13855->pinctrl,
OF_CAMERA_PINCTRL_STATE_SLEEP);
if (IS_ERR(ov13855->pins_sleep))
dev_err(dev, "could not get sleep pinstate\n");
}
mutex_init(&ov13855->mutex);
sd = &ov13855->subdev;
v4l2_i2c_subdev_init(sd, client, &ov13855_subdev_ops);
ret = ov13855_initialize_controls(ov13855);
if (ret)
goto err_destroy_mutex;
ret = __ov13855_power_on(ov13855);
if (ret)
goto err_free_handler;
ret = ov13855_check_sensor_id(ov13855, client);
if (ret)
goto err_power_off;
#ifdef CONFIG_VIDEO_V4L2_SUBDEV_API
sd->internal_ops = &ov13855_internal_ops;
sd->flags |= V4L2_SUBDEV_FL_HAS_DEVNODE;
#endif
#if defined(CONFIG_MEDIA_CONTROLLER)
ov13855->pad.flags = MEDIA_PAD_FL_SOURCE;
sd->entity.function = MEDIA_ENT_F_CAM_SENSOR;
ret = media_entity_pads_init(&sd->entity, 1, &ov13855->pad);
if (ret < 0)
goto err_power_off;
#endif
memset(facing, 0, sizeof(facing));
if (strcmp(ov13855->module_facing, "back") == 0)
facing[0] = 'b';
else
facing[0] = 'f';
snprintf(sd->name, sizeof(sd->name), "m%02d_%s_%s %s",
ov13855->module_index, facing,
OV13855_NAME, dev_name(sd->dev));
ret = v4l2_async_register_subdev_sensor_common(sd);
if (ret) {
dev_err(dev, "v4l2 async register subdev failed\n");
goto err_clean_entity;
}
pm_runtime_set_active(dev);
pm_runtime_enable(dev);
pm_runtime_idle(dev);
return 0;
err_clean_entity:
#if defined(CONFIG_MEDIA_CONTROLLER)
media_entity_cleanup(&sd->entity);
#endif
err_power_off:
__ov13855_power_off(ov13855);
err_free_handler:
v4l2_ctrl_handler_free(&ov13855->ctrl_handler);
err_destroy_mutex:
mutex_destroy(&ov13855->mutex);
return ret;
}
static int ov13855_remove(struct i2c_client *client)
{
struct v4l2_subdev *sd = i2c_get_clientdata(client);
struct ov13855 *ov13855 = to_ov13855(sd);
v4l2_async_unregister_subdev(sd);
#if defined(CONFIG_MEDIA_CONTROLLER)
media_entity_cleanup(&sd->entity);
#endif
v4l2_ctrl_handler_free(&ov13855->ctrl_handler);
mutex_destroy(&ov13855->mutex);
pm_runtime_disable(&client->dev);
if (!pm_runtime_status_suspended(&client->dev))
__ov13855_power_off(ov13855);
pm_runtime_set_suspended(&client->dev);
return 0;
}
#if IS_ENABLED(CONFIG_OF)
static const struct of_device_id ov13855_of_match[] = {
{ .compatible = "ovti,ov13855" },
{},
};
MODULE_DEVICE_TABLE(of, ov13855_of_match);
#endif
static const struct i2c_device_id ov13855_match_id[] = {
{ "ovti,ov13855", 0 },
{},
};
static struct i2c_driver ov13855_i2c_driver = {
.driver = {
.name = OV13855_NAME,
.pm = &ov13855_pm_ops,
.of_match_table = of_match_ptr(ov13855_of_match),
},
.probe = &ov13855_probe,
.remove = &ov13855_remove,
.id_table = ov13855_match_id,
};
static int __init sensor_mod_init(void)
{
return i2c_add_driver(&ov13855_i2c_driver);
}
static void __exit sensor_mod_exit(void)
{
i2c_del_driver(&ov13855_i2c_driver);
}
device_initcall_sync(sensor_mod_init);
module_exit(sensor_mod_exit);
MODULE_DESCRIPTION("OmniVision ov13855 sensor driver");
MODULE_LICENSE("GPL v2");


【一般情况下,3-13分钟左右就会花屏,摄像头程序死掉了】
[root@ok3588:/]# v4l2-ctl --list-devices
//查看设备节点
rkcif s(platform:rkcif-mipi-lvds):
/dev/video0
/devi/video1
/dev/video2
/dev/video3
/dev/video4
/dev/video5
/dev/2video6
/dev/v_ideo7
rkisp_dmainpatph (platform:rkisp0-vir1): //cam1
/dev/video40
/dev/video41
h /dev/video42
/devy/video43
/dev/video44
/dev/video45
gst-launch-1.0 v4l2src device=/dev/video0 ! video/x-raw, format=NV12, width=640, height=480, framerate=30/1 ! waylandsink
参考资料:
https://blog.csdn.net/anhuihbo/article/details/129522943
RV1126 MIPI CSI-2调试24bit RGB888格式输入
https://blog.csdn.net/qq_34341546/article/details/132740761
RK3588 MIPIRX接收RGB888/RGB565/RGB666调试
https://blog.csdn.net/weixin_42851620/article/details/131314160
介绍rk3568/3588平台录像常见的问题
https://blog.csdn.net/qq_34341546/article/details/128907000
camera调试:RK3588 MIPI/DVP camera关键配置
https://blog.csdn.net/melody157398/article/details/127761735
https://blog.csdn.net/daocaokafei/article/details/127621511
瑞芯微 | 摄像头ov13850移植笔记
https://blog.csdn.net/fhqlongteng/article/details/129366781
RK3568驱动OV13850摄像头模组调试过程
https://blog.csdn.net/weixin_58535525/article/details/119797772
关于RK3399平台OV13850摄像头调试的问题
https://blog.csdn.net/feifei126/article/details/136271613
sensor ov13850驱动研究
https://blog.csdn.net/professionalmcu/article/details/125083662
RK3566调试GC2053
http://wiki.neardi.com/wiki/module/zh_CN/docs/camera/module_camera_ov13855.html
OV13855
http://www.orangepi.cn/orangepiwiki/index.php/OV13850_%E5%92%8C_OV13855_MIPI_%E6%91%84%E5%83%8F%E5%A4%B4%E7%9A%84%E6%B5%8B%E8%AF%95%E6%96%B9%E6%B3%95
OV13850 和 OV13855 MIPI 摄像头的测试方法
https://blog.csdn.net/m0_58944591/article/details/129788061
香橙派使用摄像头
查看ov13855设备
https://blog.csdn.net/MATLABCSD/article/details/127067138
rk3588 camera bringup记录
https://blog.csdn.net/W_B_C/article/details/134380310
【RK3588 开发笔记——mipi摄像头调试】
https://blog.csdn.net/anhuihbo/article/details/128507925
FPGA模拟SENSOR,MIPI CSI-2发送图像到RV1126
https://blog.csdn.net/daocaokafei/article/details/128045530
Camera | 7.瑞芯微rk3568平台摄像头控制器MIPI-CSI驱动架构梳理
https://blog.csdn.net/weixin_45639314/article/details/135069265
RK3568 android11 调试mipi摄像头 gc2093
https://blog.csdn.net/lj13329216157/article/details/132663037
RV1126 Linux IPC摄像机 索尼IMX415 摄像头调试
如果看到图像颜色不对、充满条纹等情况。像这样:
先别慌,至少有图像了不是。到这一步了至少说明通信时没问题了。应该检查摄像头参数或者驱动有没有设置对。由于驱动是系统自带的,出问题的可能性很小,我们先不管他。
https://blog.csdn.net/DeepLearning_/article/details/127703379
瑞芯微-RV1109主板各参数介绍
·Support 2*MIPI CSI/LVDS/subLVDS
CSDN rockchip SDK修改波特率115200
https://blog.csdn.net/fei534358549/article/details/114463780
rockchip SDK修改波特率为115200
https://blog.csdn.net/longmin96/article/details/133761467
rv1126-rv1109-修改波特率为115200