项目场景:
项目场景:项目中Z轴电机对速度和精度提出了要求,现在需要平滑的进行电机控制,并能在到达定位之前提前降低速度。遂采用S曲线加减速算法对步进电机进行控制。
原理
原理部分参考这篇优秀文章,看懂后结合项目情况进行了功能实现。
S曲线方程:
硬件资源:
TIM1作为主定时器进行脉冲输出
TIM4作为从定时器对TIM1动态修改频率。
TIM5对编码器(光栅)进行计数
TIM6进行PID闭环控制
具体实现:
曲线方程生成数组:
uint32_t CurveS_Para[100]={0}; //频率列表
/*
正常版
*pbuff 存放S曲线的脉冲对应 ARR寄存器的值
fre_max 最大频率
fre_min 起始频率
count 需要加速次数
*/
void CurveS_init_1(uint32_t *pbuff,uint32_t fre_max, uint32_t fre_min,int16_t count)
{
int16_t i;
uint16_t flexible =4;//曲线区间4-6
float del_fre = fre_max-fre_min;
float deno;
float melo;
float fre;
for(i = 0;i<count;i++)
{
melo = flexible* (i-count/2.0f) / (count/2.0f);
deno = 1.0f / (1 + expf(-melo));
fre = del_fre * deno + fre_min;
pbuff[i] = (uint32_t)ceil((float)TIM1_CLOCK_FREQ/fre);
}
}
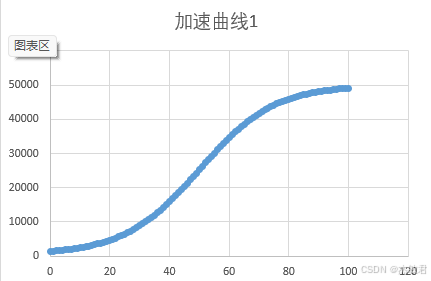
仿真效果
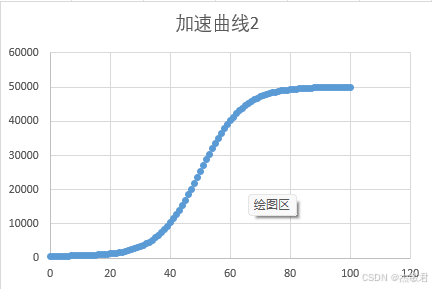
拉伸变换后:
void CurveS_init_2(uint32_t *pbuff,uint32_t fre_max, uint32_t fre_min,int16_t count)
{
int16_t i;
float del_fre = fre_max-fre_min;
float deno;//分母部分
float melo;//指数函数自变量
float fre;
for(i = 0;i<count;i++)
{
melo = ((-i*14.0f) /count)+7.0f;
deno = 1.0f / (1.0f + expf(melo));
fre = del_fre * deno + fre_min;
pbuff[i] = (uint32_t)ceil((float)TIM1_CLOCK_FREQ/fre);
}
}
仿真效果
状态机控制:
主从定时器参考我之前这篇文章:传送门
加减速控制
void SpeedAdjust(uint16_t count)
{
TIM_SetAutoreload(TIM1,CurveS_Para[count]);//设定自动重装值
TIM_SetCompare2(TIM1,CurveS_Para[count]>>1); //匹配值2等于重装值一半,是以占空比为50%
TIM_CtrlPWMOutputs(TIM1,ENABLE); //MOE 主输出使能
if(Motor.Status == SPEED_INCREASE) //加速
{
Motor.CountTemp++;
}
else if(Motor.Status == SPEED_DECREASE) //减速
{
Motor.CountTemp--;
}
//Motor.Count = Motor.CountTemp*(50/Motor.CountPropor); //加速次数
Motor.Count = Motor.CountTemp;
}
状态机放在TIM4中断中
void SpeedAdjustMachine(void)
{
switch(Motor.Status)
{
/*加速*/
case SPEED_INCREASE:
if(Motor.Count >= Motor.COUNT_MAX)
{
Motor.Status = SPEED_STABLE;
}
else
{
SpeedAdjust(Motor.Count);
}
break;
/*匀速*/
case SPEED_STABLE:
if(Motor.PWMcount >= (Motor.PWMneed-Motor.SpeedDecPWM))
{
Motor.Status = SPEED_DECREASE;
}
break;
/*减速*/
case SPEED_DECREASE:
if(Motor.Count >=1)
{
SpeedAdjust(Motor.Count);
}
if(Motor.PWMcount==Motor.PWMneed )
{
Motor.Status = Stop;
}
break;
/*停止*/
case Stop:
TIM_CtrlPWMOutputs(TIM1,DISABLE);
TIM_Cmd(TIM1,DISABLE);
TIM_Cmd(TIM4,DISABLE);
Motor.CountTemp = 0;
Motor.PWMcount = 0;
TIM_ITConfig( TIM4, TIM_IT_Update, DISABLE);
break;
/*无加减速*/
case UNIFM:
if(Motor.PWMcount==Motor.PWMneed )
{
Motor.Status = Stop;
}
break;
default :
break;
}
}
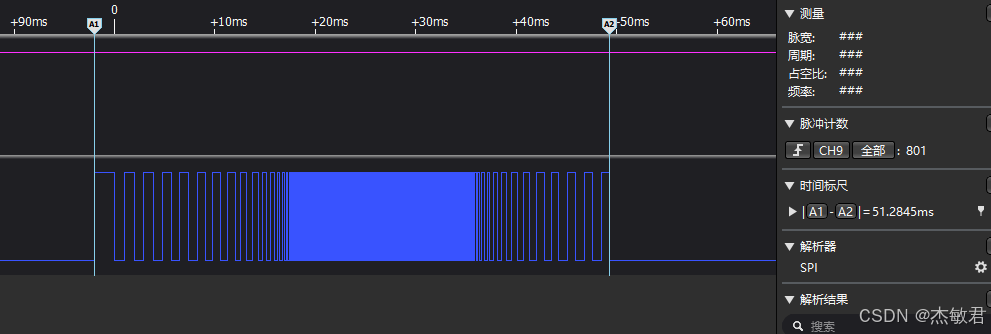
运行效果:
下班啦下班啦!!!!