第一次接触数字电位器,有错还请指正。。。。。。
免费阅览
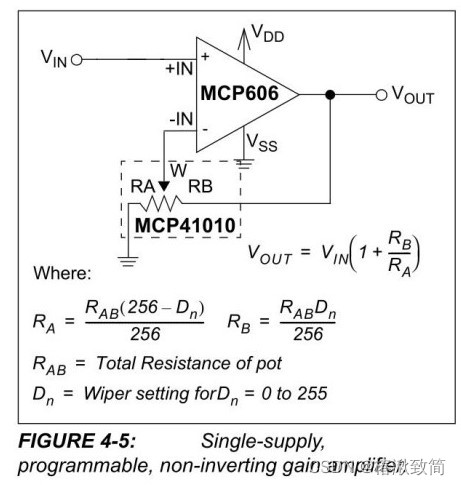
F103RCT6,通过SPI2控制MCP41010,以手册中的单相可编程正相增益放大器为例
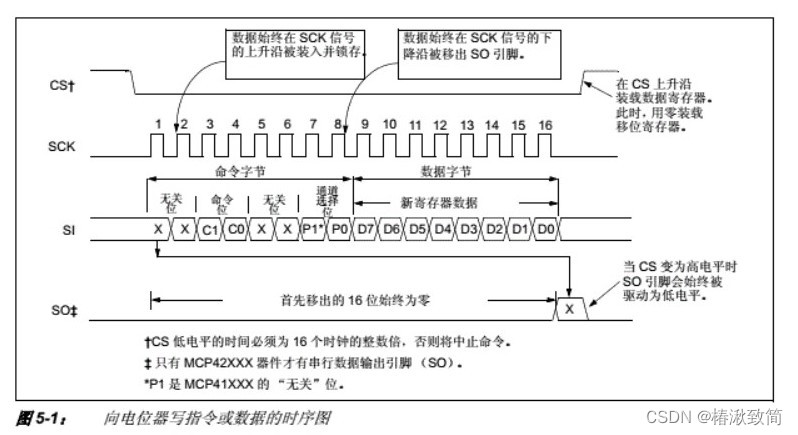
单片机需要通过SPI接口一次性向MCP41010写入16位数据,下图标的很清楚
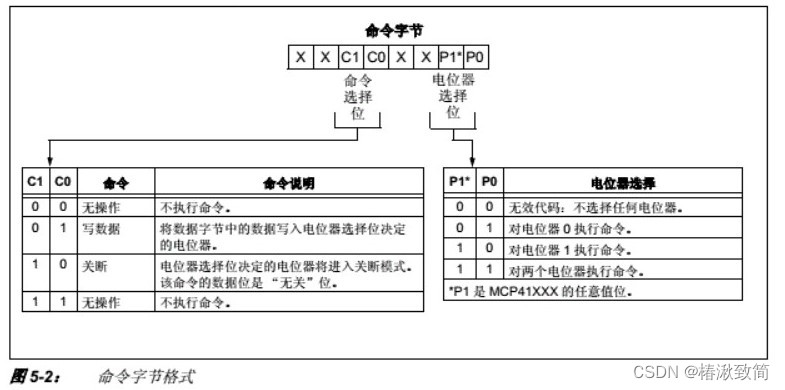
由下图可以看出410的CMOMAND BYTE是如何规定的,多数情况下为写数据操作,C1C0位为“01”,P1P0两位决定对哪一个电位器执行操作
即“0001 0001”为对电位器0执行写操作,这是命令字节
再看数据字节,和需要调节的放大倍数有关
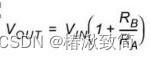
手册中的示例如下图
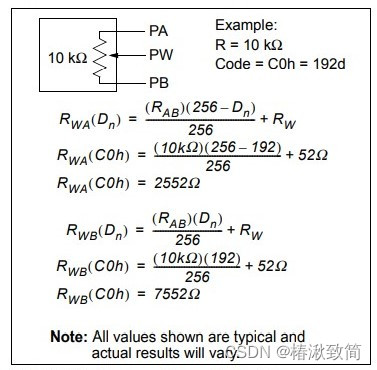
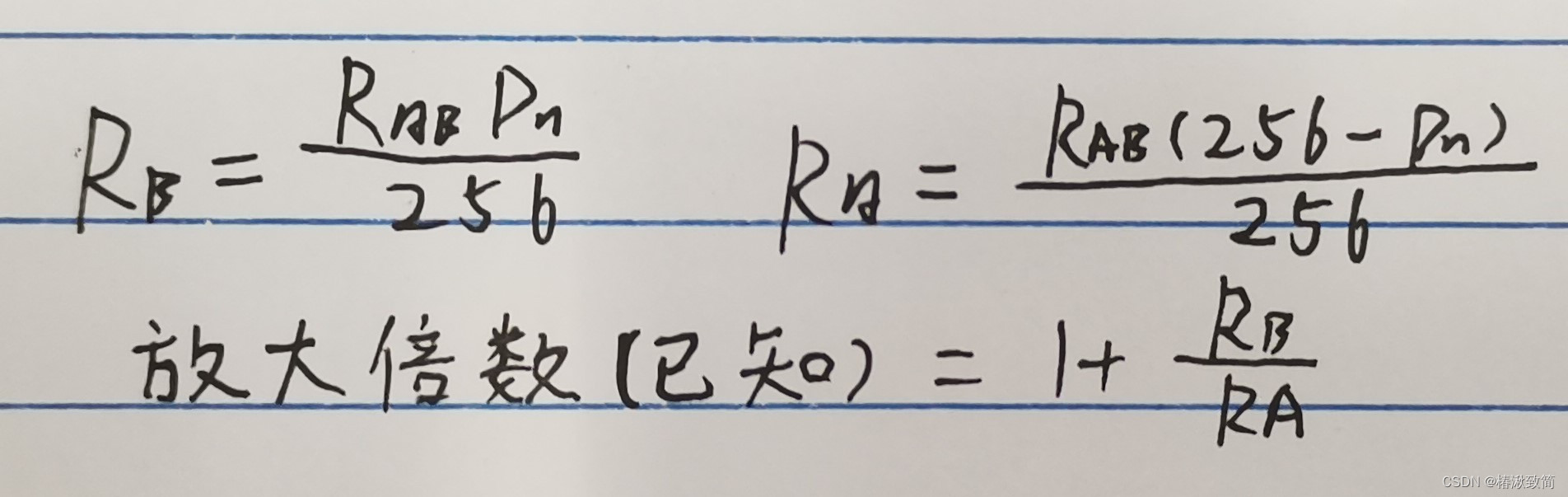
我们要输入的数据字节实际上是式中的“Dn” (0~255)以第一张图中的电路为例,放大倍数为
放大倍数通常已知,所以
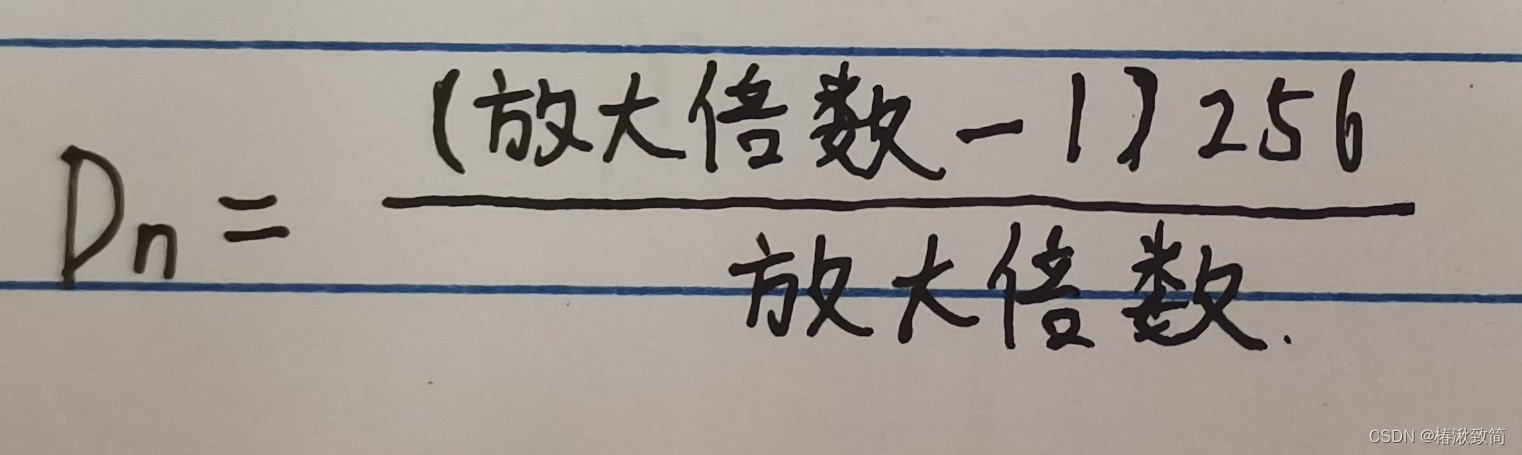
得到Dn后把前面的命令字节和Dn放在一个u16的变量中,然后等着SPI发给410,注意前后顺序!!!
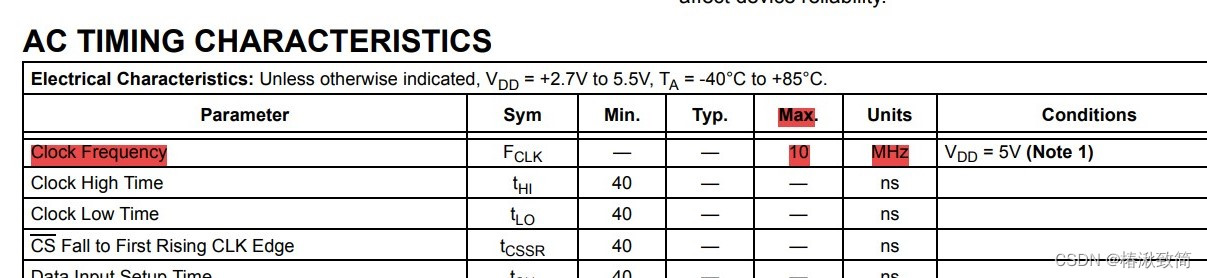
初始化SPI接口时,注意410的最大时钟频率为10M
下面是SPI2初始化的源码,我设置的SPI是16位的,一次写完
PB10和PB11是用来片选的
#include "spi.h"
SPI_InitTypeDef SPI_InitStructure;
void spi_init(void){
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //时钟使能
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //电压检测有效,高有效
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; //电流检测有效,高有效
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_16b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //选择了串行时钟的稳态:时钟悬空高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //数据捕获于第二个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI2, ENABLE); //使能SPI外设
SPI2_ReadWriteByte(0xffff);//启动传输
}
//SPI 速度设置函数
//SpeedSet:
//SPI_BaudRatePrescaler_2 2分频 (SPI 36M@sys 72M)
//SPI_BaudRatePrescaler_8 8分频 (SPI 9M@sys 72M)
//SPI_BaudRatePrescaler_16 16分频 (SPI 4.5M@sys 72M)
//SPI_BaudRatePrescaler_256 256分频 (SPI 281.25K@sys 72M)
void SPI2_SetSpeed(u8 SpeedSet)
{
SPI_InitStructure.SPI_BaudRatePrescaler = SpeedSet ;
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Cmd(SPI2,ENABLE);
}
//SPIx 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u16 SPI2_ReadWriteByte(u16 TxData)
{
u8 retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
{
retry++;
if(retry>200)return 0;
}
SPI_I2S_SendData(SPI2, TxData); //通过外设SPIx发送一个数据
retry=0;
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)//检查指定的SPI标志位设置与否:接受缓存非空标志位
{
retry++;
if(retry>200)return 0;
}
return SPI_I2S_ReceiveData(SPI2); //返回通过SPIx最近接收的数据
}
本文含有隐藏内容,请 开通VIP 后查看