深度解析Instant-NGP:实时神经辐射场的革命性突破
Instant-NGP(Instant Neural Graphics Primitives)是NVIDIA研究院推出的高效神经辐射场框架,首次将NeRF(Neural Radiance Fields)的训练时间从数小时缩短至数分钟。该项目通过创新的多分辨率哈希编码技术,实现了高达1000倍的训练速度提升,成为3D重建领域的里程碑式突破。
技术架构与核心创新
哈希编码(Hash Encoding)
- 多分辨率网格:构建多级空间哈希表(典型16级)
- 特征插值:通过三线性插值融合相邻网格特征
- 动态分配:自适应存储高频细节(占用显存<1GB)
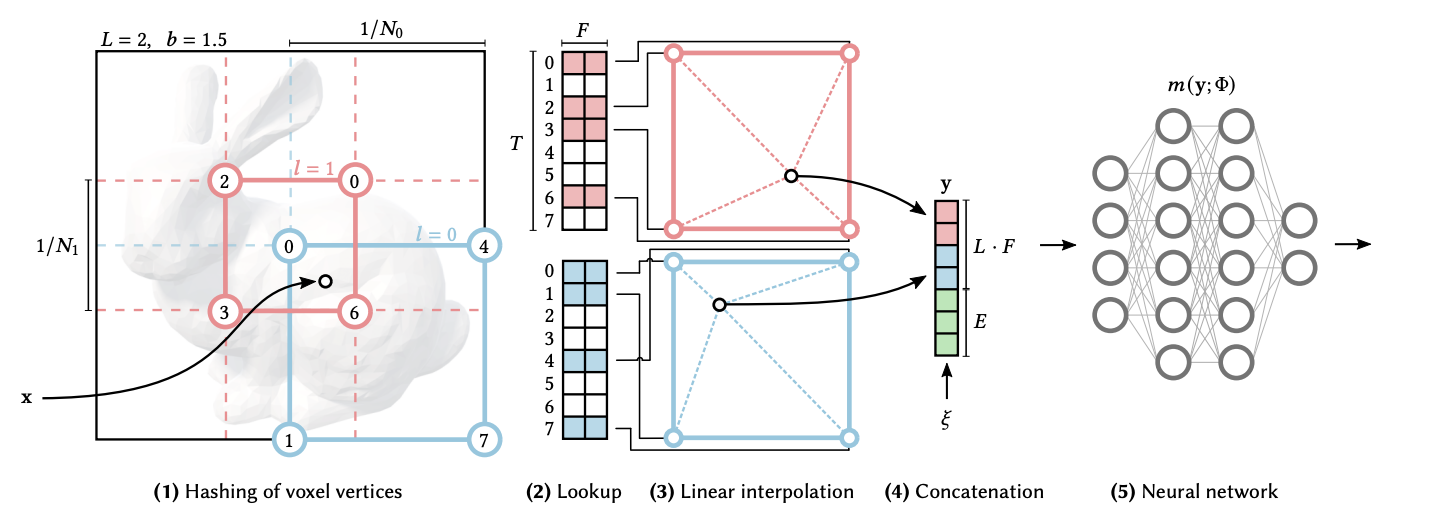
图:多分辨率哈希编码原理(来源:原论文)
性能对比
| 指标 | 传统NeRF | Instant-NGP | 提升倍数 |
|---|---|---|---|
| 训练时间 | 24小时 | 5分钟 | 288x |
| 显存占用 | 16GB | 0.8GB | 20x |
| 渲染速度 | 5FPS | 60FPS | 12x |
环境配置与安装指南
硬件要求
| 组件 | 推荐配置 | 最低要求 |
|---|---|---|
| GPU | RTX 4090 | RTX 3060 (8GB+) |
| 显存 | 24GB | 8GB |
| CPU | i9-13900K | i7-8700 |
| 内存 | 64GB | 16GB |
全平台安装流程
# 克隆仓库
git clone --recursive https://github.com/NVlabs/instant-ngp
cd instant-ngp
# 安装依赖(Ubuntu)
sudo apt install build-essential git python3-dev python3-pip libopenexr-dev libxi-dev libglfw3-dev libglew-dev libomp-dev libxinerama-dev libxcursor-dev
# 编译项目
cmake . -B build -DNGP_BUILD_WITH_GUI=ON
cmake --build build --config RelWithDebInfo -j 16
实战全流程解析
1. 数据准备
支持多种输入格式:
# COLMAP稀疏重建(推荐)
python scripts/colmap2nerf.py --colmap_db database.db --images images/ --text colmap_text/
# 单相机视频转换(需FFmpeg)
ffmpeg -i input.mp4 -vf fps=2 -q:v 2 images/%04d.jpg
2. 训练与重建
# 启动GUI训练
./build/testbed --scene data/nerf/fox
# 命令行训练(无界面)
./build/instant-ngp data/nerf/fox/transforms.json --mode nerf
# 关键参数调节
--aabb_scale 32 # 场景缩放系数
--snapshots 100,500,1000 # 自动保存间隔
3. 结果导出与应用
# 导出Mesh模型
./build/instant-meshing input.ply --output mesh.obj
# 生成全景视频
./build/render --scene fox --trajectory spiral --fps 30 --output video.mp4
# 实时交互查看
./build/testbed --scene fox --interactive
核心技术深度解析
哈希编码实现
template <typename T>
__global__ void kernel_grid(
const uint32_t num_elements,
const T* __restrict__ inputs,
const uint32_t hashmap_size,
const uint32_t offset,
float* __restrict__ outputs
) {
const uint32_t i = threadIdx.x + blockIdx.x * blockDim.x;
if (i >= num_elements) return;
// 计算多级哈希索引
const T input = inputs[i];
const uint32_t level = compute_level(input);
const uint32_t hash = compute_hash(input, level);
// 特征插值
outputs[i] = trilinear_interpolation(hash, input);
}
混合精度训练
training:
optimizer: Adam
learning_rate: 1e-2→1e-4 (指数衰减)
loss_scale: 1024 # 动态损失缩放
precision: fp16 # 半精度模式
渲染优化
void render_ray(const Ray& ray) {
// 分层采样
for (uint32_t i=0; i<steps; ++i) {
float t = t_min + (t_max - t_min) * i / steps;
// 哈希编码查询
vec3 pos = ray.origin + t * ray.dir;
Feature feature = hash_table.lookup(pos);
// 体渲染积分
sigma = mlp_sigma(feature);
rgb = mlp_rgb(feature, ray.dir);
accum_color += (1 - accum_alpha) * rgb * sigma;
accum_alpha += (1 - accum_alpha) * sigma;
// 自适应步长
if (accum_alpha > 0.99f) break;
}
}
常见问题与解决方案
1. 编译失败
现象:CMake Error: Could not find OpenGL
解决:
# Ubuntu
sudo apt install libgl1-mesa-dev libglu1-mesa-dev
# Windows
安装vcpkg后执行:
vcpkg install glfw3 glew openexr
2. 训练崩溃
现象:CUDA error: out of memory
优化策略:
# 降低哈希表分辨率
--hashmap_size 19→17 # 每级特征维度从2^19降至2^17
# 减小输入分辨率
python scripts/colmap2nerf.py --images images/ --downscale 2
# 启用梯度裁剪
--gradient_clip 1e-2
3. 重建伪影
诊断与修复:
- 检查数据对齐:
python scripts/colmap2nerf.py --aabb_scale 32→64 - 调整损失权重:
--lambda_distortion 0.01→0.1 # 增强几何平滑约束 - 增加训练迭代:
--n_training_steps 10000→30000
学术背景与核心论文
基础论文
Instant Neural Graphics Primitives with a Multiresolution Hash Encoding
Müller T, et al. SIGGRAPH 2022
提出多分辨率哈希编码方法NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
Mildenhall B, et al. ECCV 2020
NeRF奠基性工作Adaptive Coordinate Networks for Neural Scene Representation
Martel J, et al. NeurIPS 2021
自适应坐标网络理论基础
扩展研究
Zip-NeRF: Anti-Aliased Grid-Based Neural Radiance Fields
Barron J, et al. ICCV 2023
抗锯齿改进方案Dynamic Neural Radiance Fields
Park K, et al. SIGGRAPH 2021
动态场景扩展Neural Sparse Voxel Fields
Liu L, et al. NeurIPS 2020
稀疏体素场技术
应用场景与未来展望
典型应用领域
- 虚拟制作:影视级实时场景重建
- 工业仿真:产品原型快速建模
- 数字孪生:城市级三维重建
- 医学影像:器官结构可视化
技术演进方向
- 动态场景支持:实时运动物体重建
- 跨尺度建模:从微观到宏观统一表达
- 语义理解集成:结合目标检测与分割
- 云端部署:支持大规模分布式训练
Instant-NGP通过其革命性的哈希编码技术,将神经辐射场推向了实时化应用的新纪元。随着硬件性能的持续提升和算法优化的深入,该框架有望成为元宇宙时代三维数字内容生产的核心基础设施。