过去的5个月,香港大学 MaRS 实验室陆续开源了四套面向无人机的在线 SLAM 框架:**FAST-LIVO2 、Point-LIO(grid-map 分支) 、Voxel-SLAM 、Swarm-LIO2 **。这四套框架覆盖了单机三传感器融合、高带宽高速机动、长时间多级地图优化以及去中心化集群协同等核心应用场景,几乎囊括当下无人机自主导航的主要需求。
本文将介绍每套 SLAM 算法的核心内容与技术亮点,帮助您选择适配的方案并快速上手。文末还附有论文与代码链接,方便您一键直达。
01 FAST-LIVO2
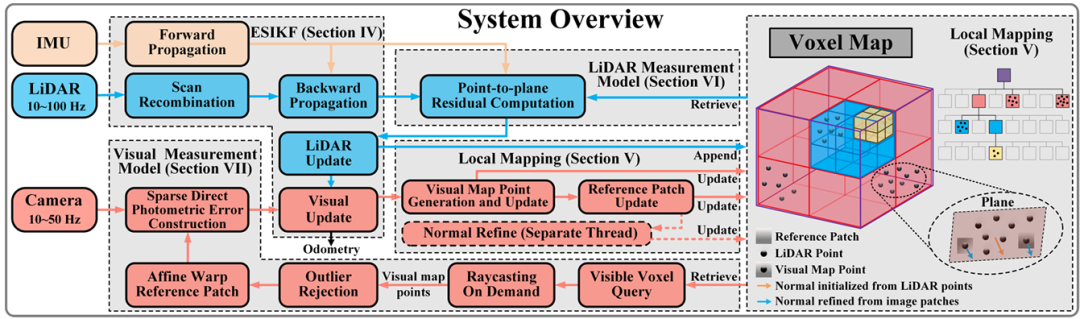
FAST-LIVO2 是一种融合激光雷达(LiDAR)、惯性测量单元IMU和视觉信息的高效定位与建图系统,核心采用误差状态迭代卡尔曼滤波器(ESIKF)与顺序更新策略,实现精确状态估计。不同于传统方法,FAST-LIVO2 避免特征提取,直接处理原始 LiDAR 和图像数据,提升了计算效率与系统鲁棒性。
图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
技术亮点
直接法融合策略,抛弃繁琐特征提取LiDAR模块直接对原始点云进行配准,无需提取边缘或平面特征。视觉模块通过最小化光度误差进行图像对齐,避免了传统的特征点提取过程。
统一体素地图,几何与纹理深度协同
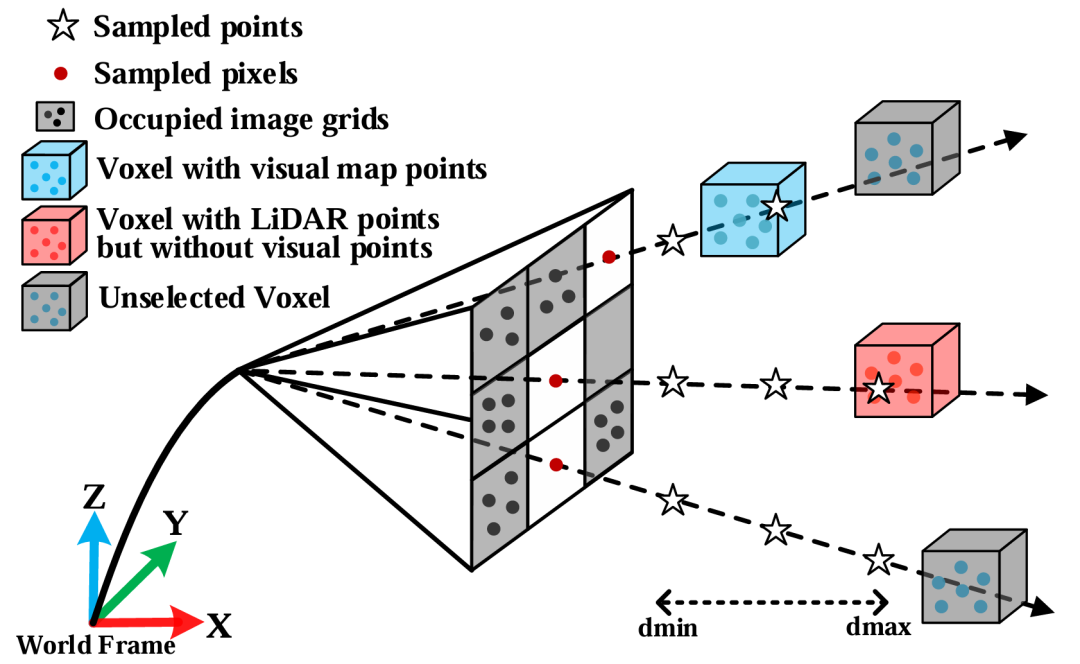
系统采用统一的体素地图结构,LiDAR构建几何结构,图像patch附着于LiDAR平面形成“视觉地图点”,实现稠密彩色地图构建。该策略不仅优化了数据结构,也保障了多源信息的一致性融合。图像对齐与鲁棒性增强通过最小化光度误差进行稀疏图像对齐,动态更新参考图像patch;在LiDAR盲区或FoV不足时,按需射线投影补齐盲区;实时估算曝光时间,适应剧烈光照变化;FAST-LIVO2 同时提升了图像对齐精度与在光照骤变或点云缺失场景下的鲁棒性。

图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
- ESIKF惯序更新,系统收敛更快更稳采用误差状态迭代卡尔曼滤波器(ESIKF),对 LiDAR 与图像依次更新状态,解决了多源观测维度不一致的问题,极大提高融合精度与实时性。

图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
- 优化资源利用
为了适配资源受限的嵌入式平台,FAST-LIVO2 对系统架构与算法流程进行了深度优化。实测表明,FAST-LIVO2 能够在 RK3588、Jetson Orin NX、RB5 等低功耗 ARM 平台上稳定运行,单帧处理时延控制在 78 ms 以内,满足实时导航与建图的需求。
02 Swarm-LIO2
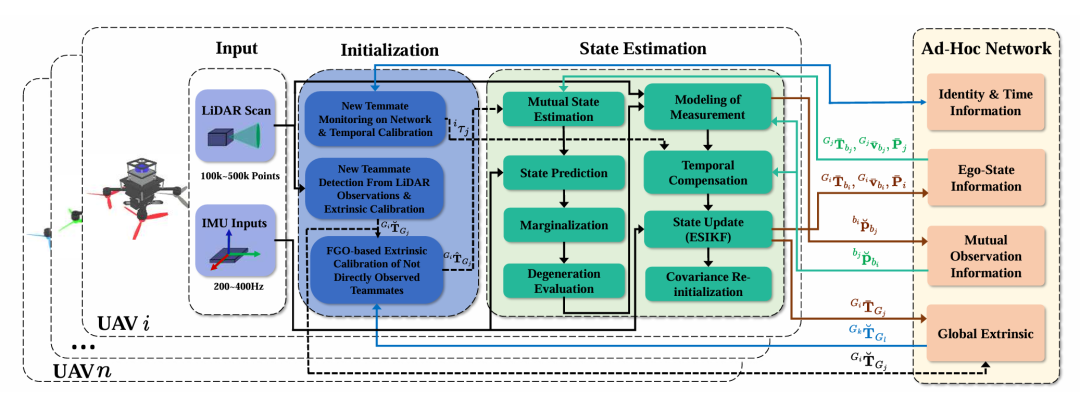
Swarm-LIO2 是港大 MaRS 实验室4月最新开源的无人机集群 LiDAR-IMU 状态估计框架,它通过去中心化 + 即插即用 + 超低带宽 + 边缘化加速,在 GPS 拒止、视野遮挡甚至 LiDAR 退化场景中,依旧为 40 架 UAV 提供厘米级本机与互相位姿,堪称“无人机集群的 RTK”。
图片来源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
技术亮点
全分布式,去中心化设计基于 Ad-Hoc 网络搭建分布式通信框架,每架无人机自主广播身份与状态,无需中心节点协调,避免单点故障。
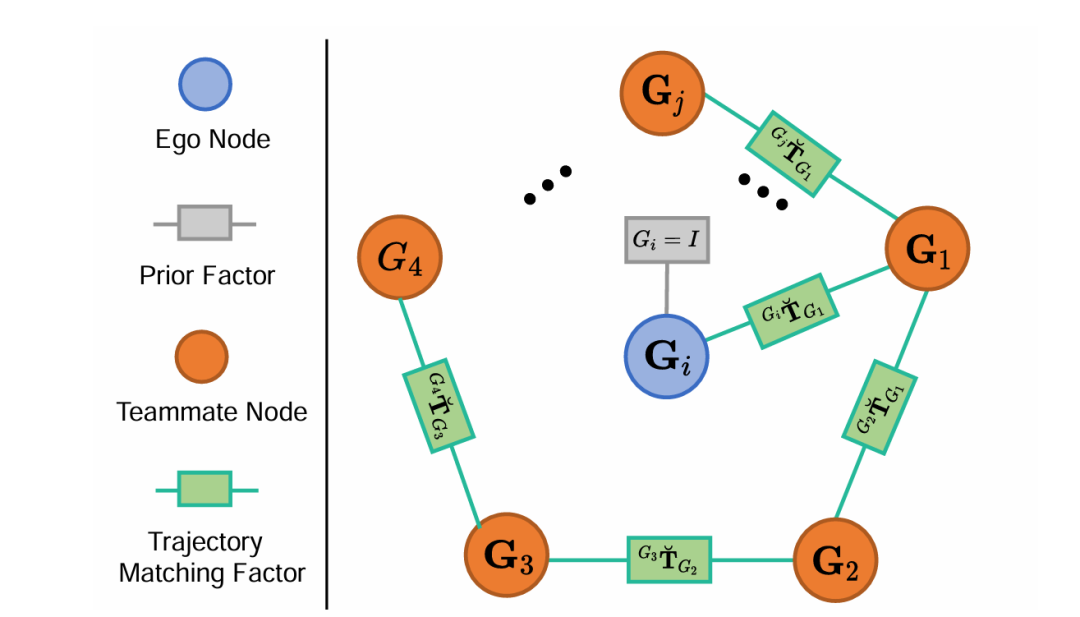
反光特征 + 因子图快速初始化通过在机体贴反光条,每架无人机可在飞行中自动检测新队友,并通过轨迹匹配+因子图优化完成时间延迟与全局外参的自动校准,支持大规模集群快速初始化。
图片来源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
高效估计器:ESIKF + 边缘化机制基于ESIKF融合 LiDAR、IMU 及互观测量,提供高精度位姿估计。引入边缘化策略,仅对当前可观测的队友外参进行估计,避免计算量随集群规模增长,显著提高扩展性。
时间补偿机制针对不同无人机之间的传感器异步问题,设计了精细的互观测量时间补偿模型,显著提升互定位精度。
充分验证
- 在仿真和真实环境中,Swarm-LIO2 实现了包括:室外避障编队飞行、穿越密林任务、目标跟踪与动态入队/退队、多UAV协同运输、展示了在通信中断、LiDAR退化等极端条件下仍能维持高鲁棒性。
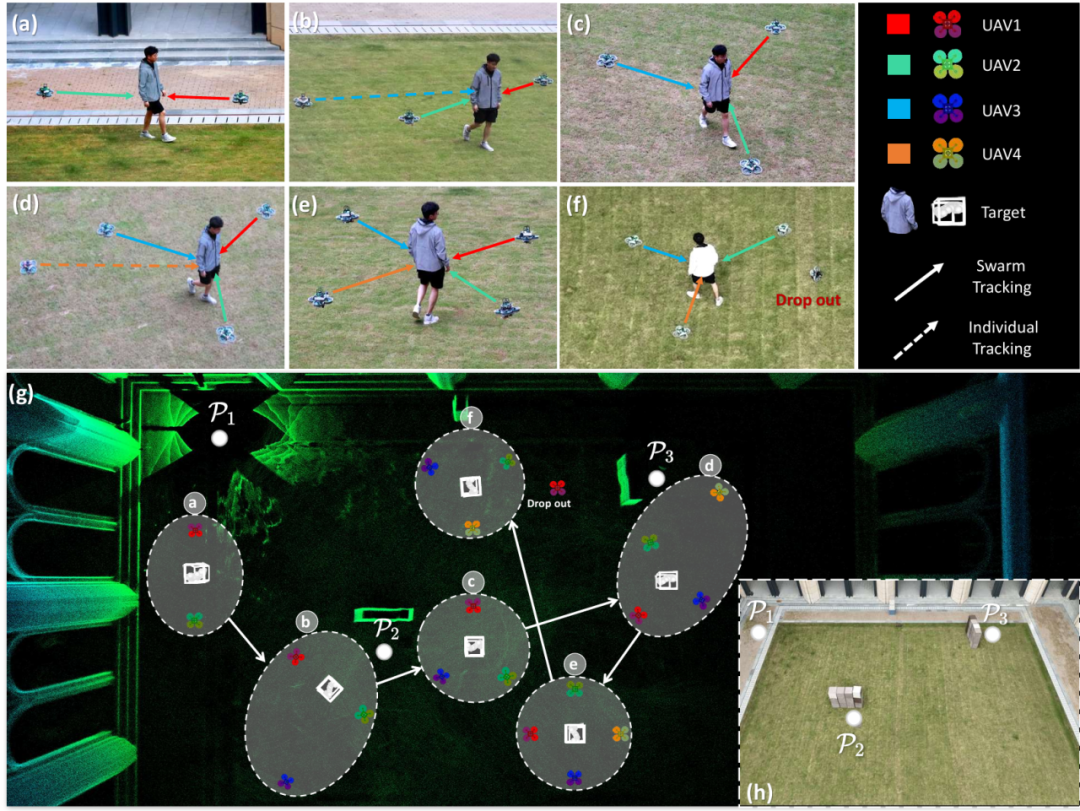
图片来源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
03 Voxel-SLAM
Voxel-SLAM 是一个完整、准确且通用的 LiDAR-Inertial SLAM 系统,系统模块包括:初始化、里程计估计、局部建图、闭环检测、全局建图。其核心优势在于:五大模块统一使用自适应Voxel Map结构,并通过对短期、中期、长期、多图关联四类数据关联的统一建模,实现从动态初始化到多次会话闭环的端到端高精度建图。
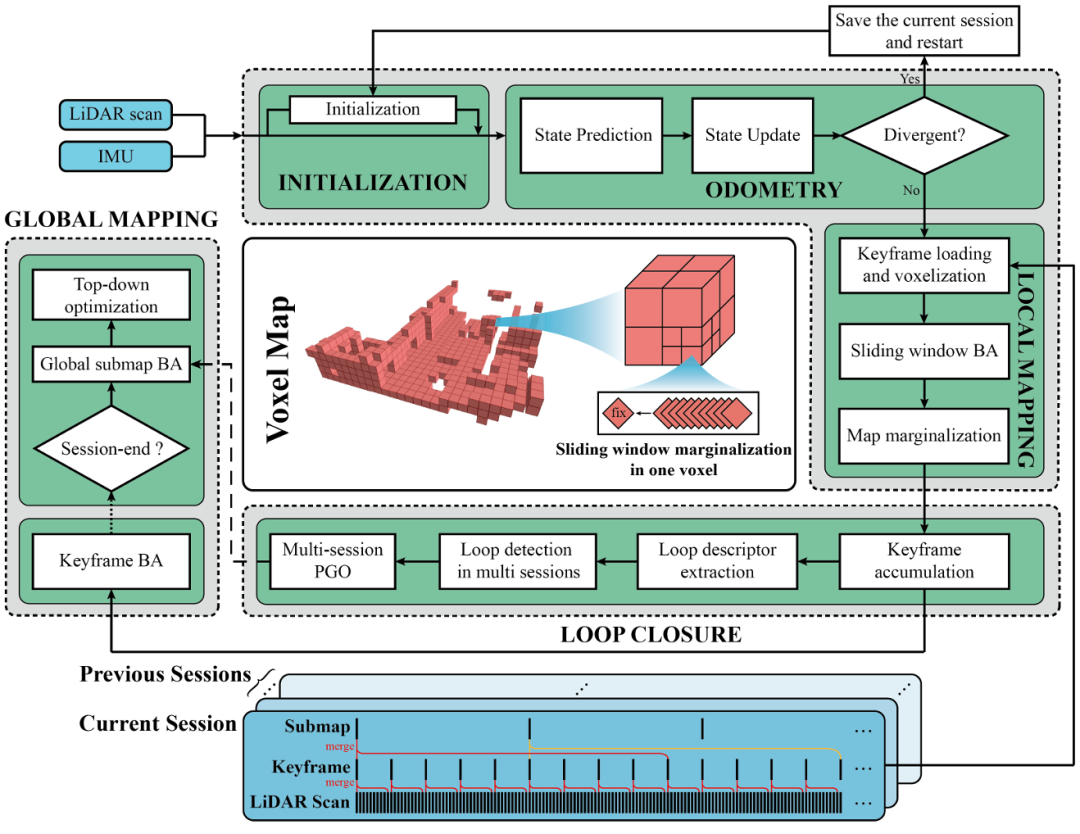
图片来源:《Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System》,arXiv:2410.08935,2024
技术亮点
统一的自适应体素地图结构所有模块均采用自适应体素地图进行数据表达,实现各模块的高效协同与快速数据关联。
高效鲁棒的初始化即使在非静止初始状态下,仅需约1秒数据即可完成系统的高精度初始化。
中期数据关联的实时局部优化通过创新的LiDAR-惯性BA技术,实现实时优化状态与地图,显著增强系统对快速运动和退化场景的适应能力。
多会话回环检测与重定位支持当前与历史会话之间的回环检测,极大提高长期运行时的系统稳定性。
高效的全局一致性地图优化引入层次化的全局优化方法,确保地图精度与一致性,同时保证了高效的计算性能。
出色的鲁棒性与泛化能力经测试表明,Voxel-SLAM在室内狭窄场景、城市大规模户外环境及无人机高空作业场景中均展现了卓越的定位与建图能力。
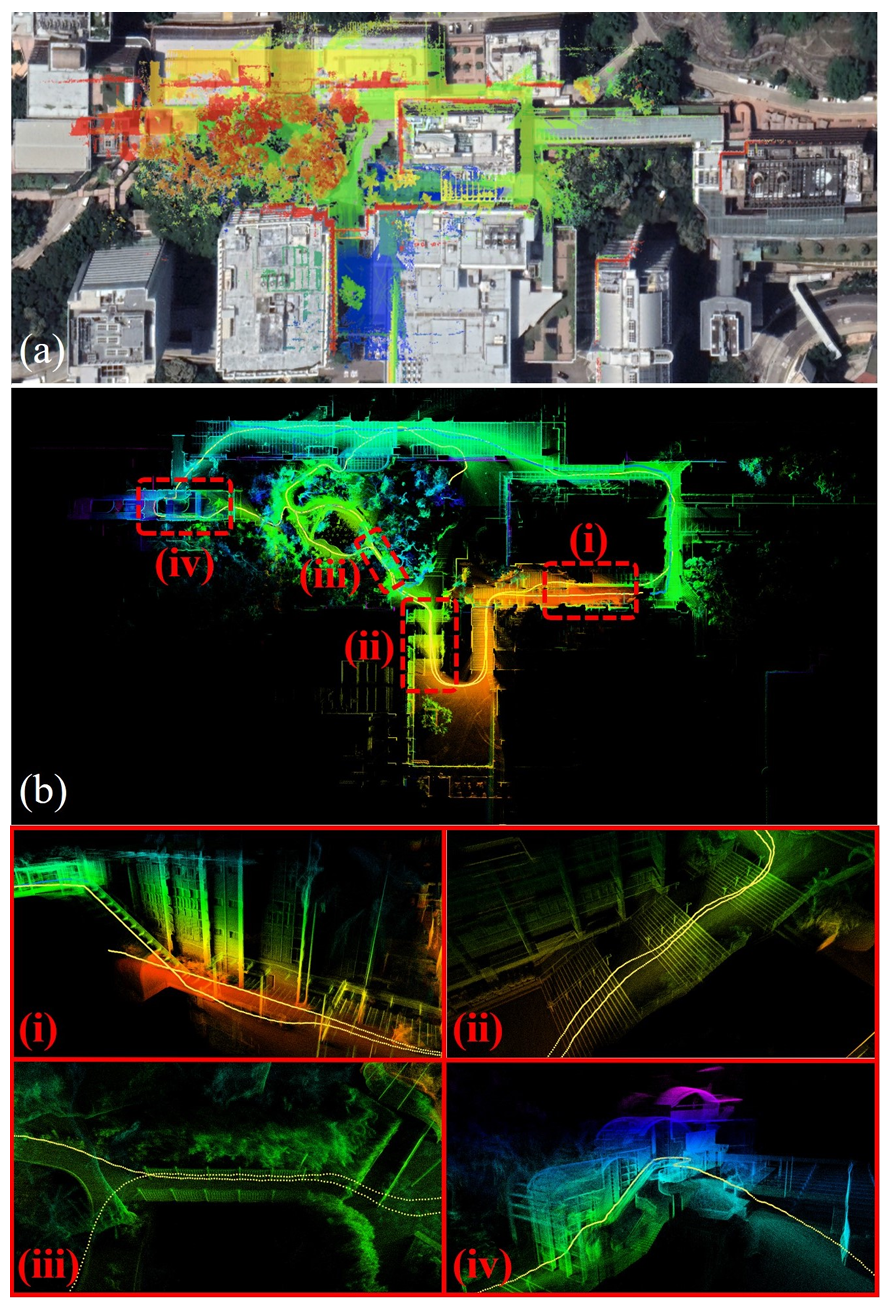
图片来源:《Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System》,arXiv:2410.08935,2024
04 Point-LIO(grid-map 分支)
2025年2月港大在原 Point-LIO 框架中新增 point-lio-with-grid-map 分支,引入占据栅格重建与退化检测,专为竞速 UAV 的极限机动与高带宽控制设计 。
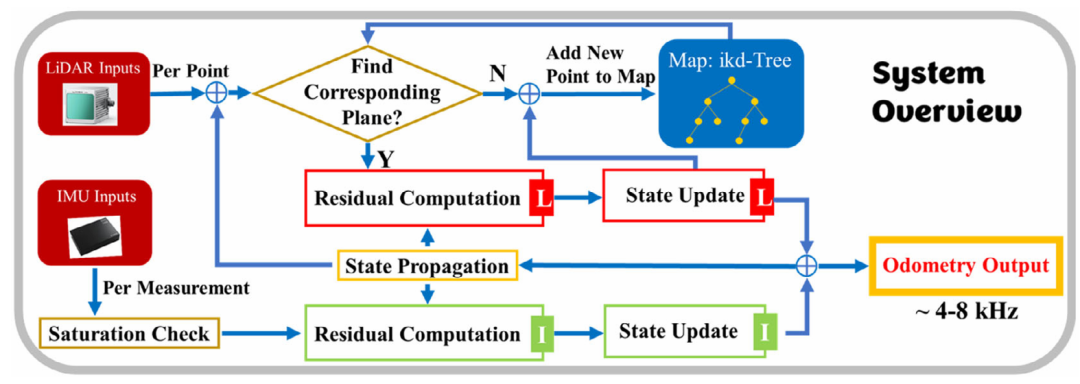
图片来源:《Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry》,Advanced Intelligent Systems 2023
升级内容
新增栅格地图构建与退化检测逻辑。
持续 4–8 kHz 的里程计输出,75 rad/s 角速度下仍无 IMU 饱和。
快速上手:与原 Point-LIO 完全兼容,建议搭配 200 Hz 以上 IMU 与硬同步 LiDAR,充分发挥高频优势。
05 如何选择+上手要点?
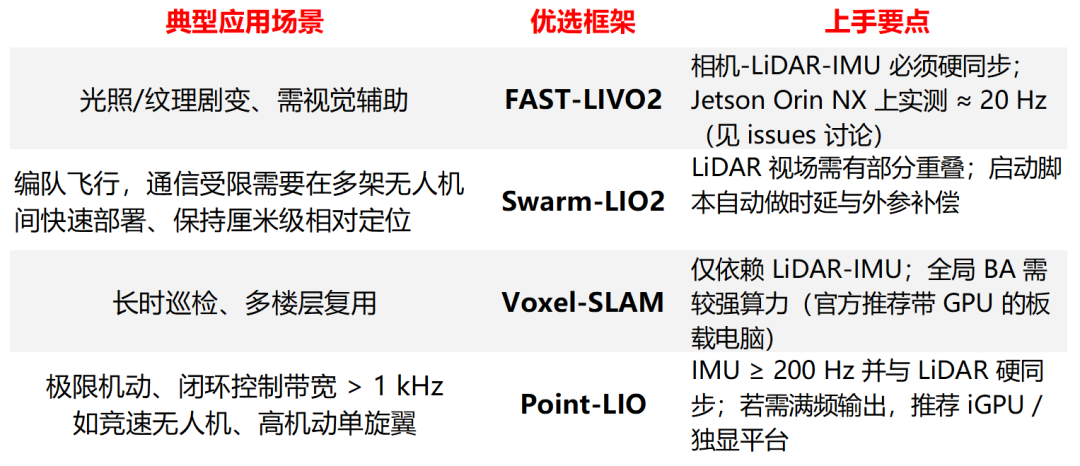
注意本文仅聚焦实时 SLAM / LIO / VIO;不含多会话地图融合(LAMM)或稠密重建(GS-SDF、M2Mapping)等后端组件。
资源速递
FAST-LIVO2:快速直接的激光-惯导-视觉里程计
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry
论文链接:https://arxiv.org/pdf/2408.14035
FAST-LIVO2代码开源:
https://github.com/hku-mars/FAST-LIVO2
硬同步设备开源:
https://github.com/xuankuzcr/LIV_handhold
相机和激光雷达标定开源:
https://github.com/hku-mars/FAST-Calib*
Swarm-LIO2:去中心化无人机集群激光-惯导里程计
Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms
论文链接:https://arxiv.org/abs/2409.17798
开源代码:https://github.com/hku-mars/Swarm-LIO2
Voxel-SLAM:完备、精确且多功能的激光-惯导 SLAM 系统
Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System
论文链接:https://arxiv.org/abs/2410.08935
开源代码:https://github.com/hku-mars/Voxel-SLAM
Point-LIO(grid-map 分支):高带宽激光-惯导里程计
Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry
论文链接:https://advanced.onlinelibrary.wiley.com/doi/full/10.1002/aisy.202200459
开源代码:https://github.com/hku-mars/Point-LIO/tree/point-lio-with-grid-map
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答10000+无人机开发者和你共同进步!