线粒体供能诱导人造细胞内肌动蛋白单体
一、自供能技术在机器人领域的应用现状和发展趋势
自供能技术在机器人人工肌肉领域的应用通过将环境能量(如光、热、机械运动、化学能)直接转化为机械能,为机器人系统提供了更高的自主性和适应性。
(一)应用现状
1. 太阳能驱动技术
南开大学团队开发基于多孔聚丙烯/炭黑薄膜的“太阳能人工肌肉发动机”,利用光热效应引发溶剂蒸发,产生自振荡运动。该技术可在太阳光等散射光下持续工作,实现0.9%的能量转换效率,并负载自重4倍的物体。
2. 机械能收集技术
人体动能利用:自供气式人工肌肉装置通过鞋垫气囊收集行走时的重力势能,转化为气体压力驱动阵列式人工肌肉气囊,无需外部气泵,适用于下肢辅助外骨骼。
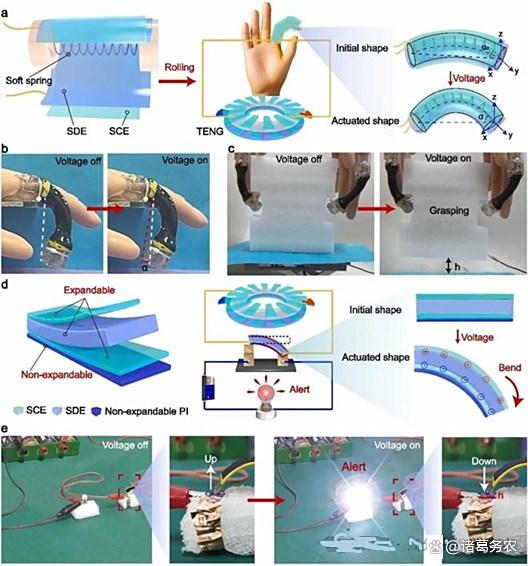
摩擦纳米发电机(TENG):北京化工大学团队将TENG与自修复介电弹性体致动器(ISDEA)集成,利用人体运动产生的微电流驱动人工肌肉,输出电流仅微安级,兼具安全性(如手指康复训练仪)。
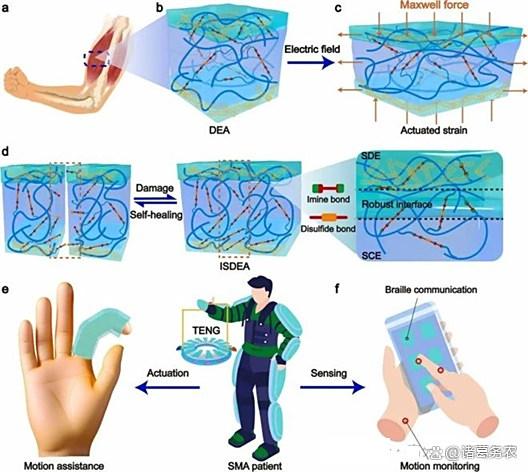
自供电手指康复训练仪和柔性电容传感器
3. 生化能转换技术
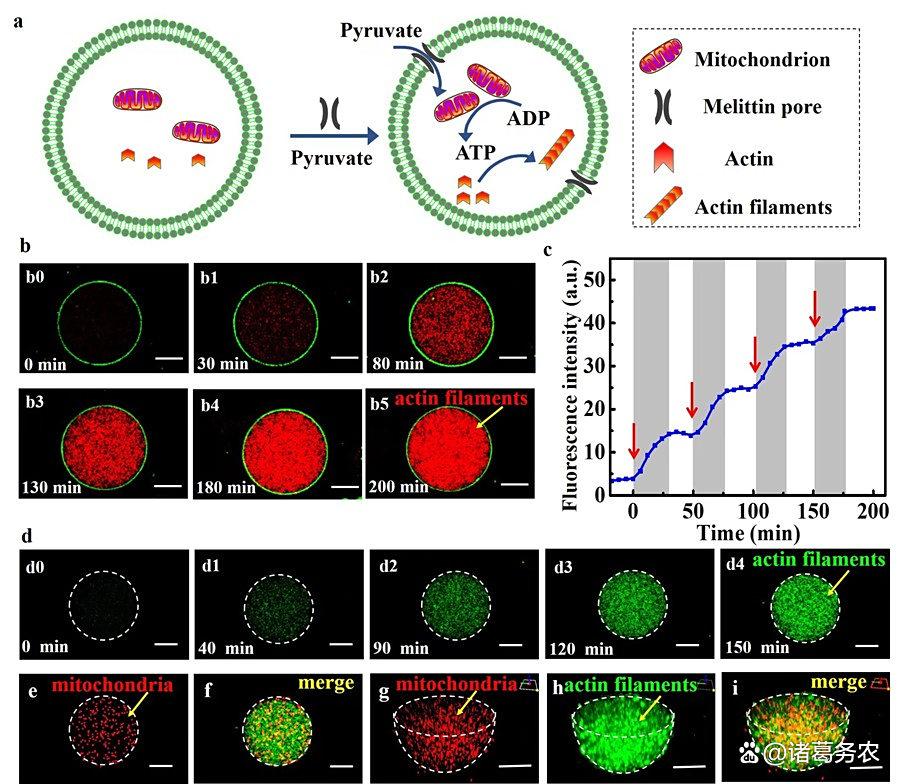
哈工大团队封装线粒体与肌动蛋白单体,制成自供能人造细胞。在丙酮酸刺激下,线粒体生成ATP触发肌动蛋白聚合,诱导细胞形变,模拟肌肉收缩行为,为组织工程提供新思路。
4. 多功能集成技术
汉阳大学开发碳纳米管人工肌肉,通过注入两性高分子(PEDOT:PSS)固定结构,兼具驱动与储能功能,循环稳定性达1000次以上5。
(二)优势与不足
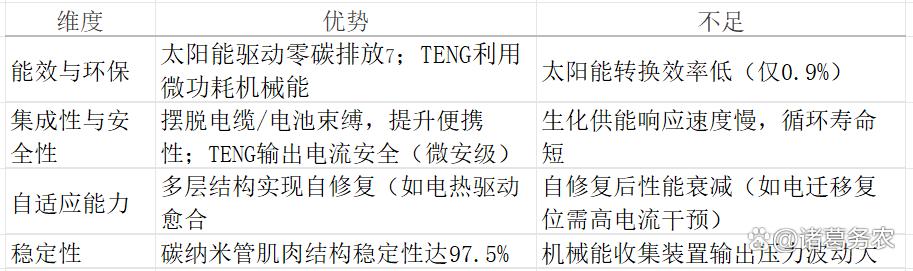
自供能驱动技术的优势与不足
(三)研发重点与难点
1. 能量转换效率提升
难点:太阳能驱动中光热-机械能转换链路过长导致损耗;机械能收集依赖步态周期性,能量输出不稳定。
进展:多孔薄膜设计加速溶剂扩散,提升太阳能做功密度至30.9×10⁻⁵ J/g;汉阳大学通过电加热除水,将驱动周期提升5倍。
2. 结构稳定性与多功能集成
难点:线圈结构人工肌肉易松脱;驱动层与电极层界面易剥离。
进展:碳纳米管束锚定技术抑制扭转;强界面结合力设计(如π-π作用键合碳纳米管与弹性体)使界面结合力达4.12 N。
3. 自修复与长效运行
难点:电损伤/机械损伤导致性能不可逆衰减;传统自愈材料依赖外部刺激。
进展:多层人工肌肉通过液态金属电路定位损伤,焦耳热熔融热塑性中间层实现自主修复;自愈离子导体材料断裂后24小时内自愈。
自供电手指康复训练等性能表征
(四)发展趋势
1. 多能源互补系统
融合光能、机械能、生化能(如线粒体供能),提升环境适应性。例如:太阳能-TENG混合驱动实现昼夜连续工作。
2. 结构-功能一体化设计
开发兼具驱动、传感、储能的人工肌肉(如碳纳米管肌肉的伪电容特性),并集成柔性电容传感器实现人机交互(如智能软键盘)。
3. 仿生智能化升级
类生物自愈机制:模拟皮肤损伤响应(如电信号触发局部修复)。
群体协同控制:人造细胞群实现同步收缩(声场调控半融合结构)。
4. 低功耗驱动与能量管理
优化介电弹性体材料(如自修复SDE)降低驱动电压;TENG微型化提升能量收集密度。
(五)结论
自供能人工肌肉正朝着高效化、智能化、仿生化方向演进。短期需突破能量转换效率与循环稳定性瓶颈;长期看,多能源协同、结构-功能一体化及生物融合系统将成为颠覆性突破的核心。在柔性机器人、康复医疗(如脊髓性肌萎缩治疗)、可穿戴设备等领域已展现应用潜力,未来或推动机器人向“能源自主”和“生命模拟”跃迁。
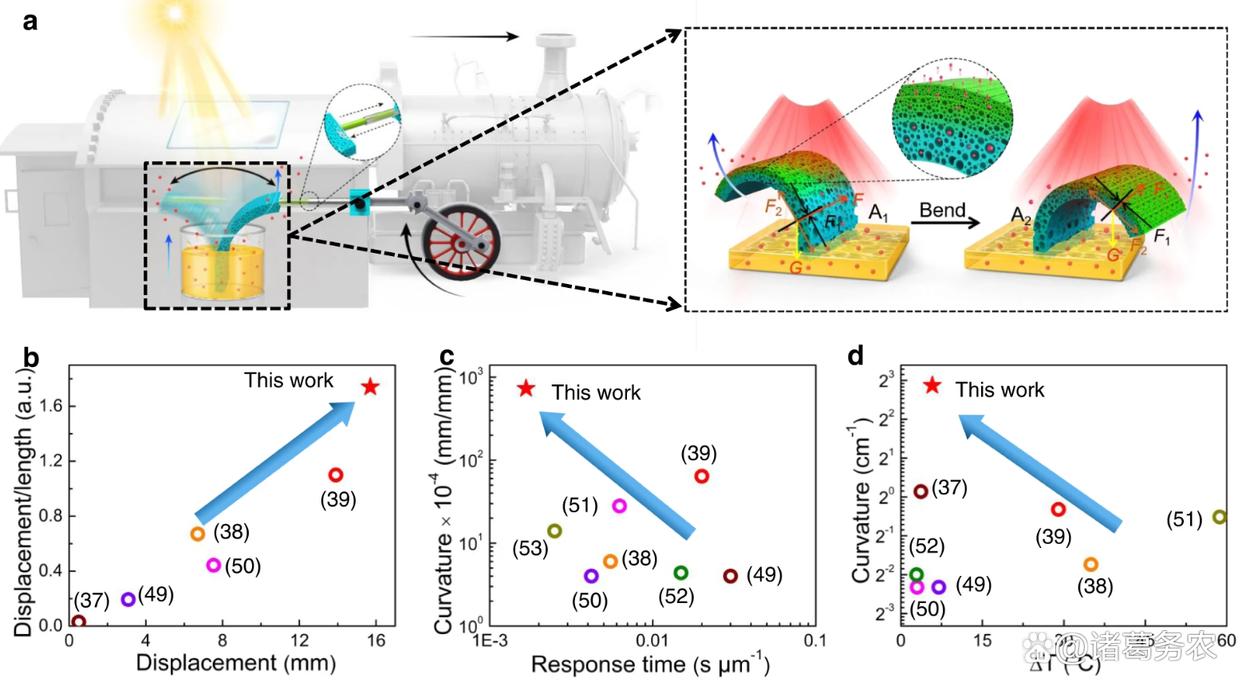
自振荡太阳能人工肌肉及其性能特征
二、自供能技术人工肌对材料性能的要求
自供能人工肌肉旨在将环境能量(如化学能、机械能、光能)直接转化为机械运动,减少对外部电源的依赖。
(一)核心材料与技术
1. 电化学驱动材料
碳纳米管纤维(CNT):通过电化学双电层吸附离子实现收缩,能量转化效率高。在CNT表面修饰葡萄糖氧化酶(GOx)和漆酶(Lac),构建生物燃料电池(阳极:CNT@GOx,阴极:CNT@Lac),利用葡萄糖氧化反应产生电流驱动收缩。
离子导体材料:如自修复导离子橡胶,通过离子迁移产生形变。利用离子偶极作用增强稳定性,实现低电压驱动(如24V)和自愈功能。
2. 形状记忆合金
镍钛诺(NiTi合金)通过热/电触发相变实现形状恢复,伸缩幅度大(>50%)。与燃料电池集成,将化学能(如柴油)转化为电能驱动相变。
3. 介电弹性体
硅基薄膜:纳米级多层硅薄膜堆叠(数千层),工作电压低至40V(纽扣电池即可驱动)。采用交流电喷工艺制备的超薄均匀硅膜,可提升界面结合力。
高介电弹性体:如氰丙基改性硅氧烷,介电常数高达18.1,电场响应灵敏(3.2 V/μm即可驱动)。加之热可逆交联网络设计,可支持自愈和回收。
4. 自修复材料
动态键合聚合物:如含金属配位键的弹性体(如Zn²⁺-配体网络),室温自愈(断裂后24小时恢复)。交联键设计模拟“渔网结构”,拉伸时键可逆断裂/重组。
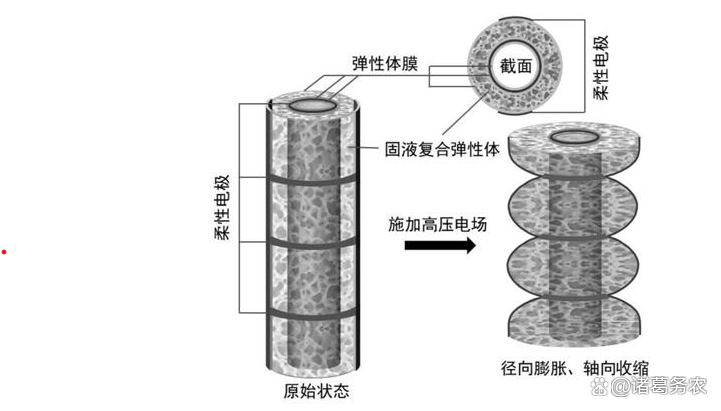
固-液复合纤维:多孔热塑性弹性体(如SBS)填充介电液(如变压器油),兼具电驱动与自修复能力。静电纺丝结合浸渍提拉法,实现多层同轴结构。
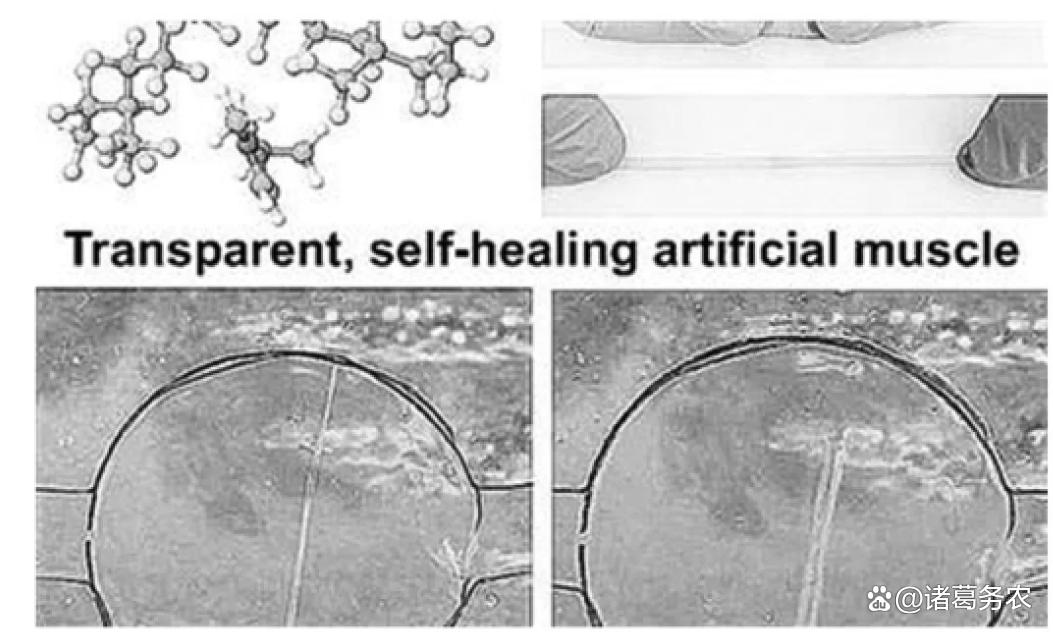
具有自愈功能的透明人造肌肉
(二)材料技术要求
1. 能量转换效率
化学能驱动需高催化活性(如酶修饰CNT的电流密度≥1 mA/cm²);介电材料需高介电常数(>15)和低弹性模量(<1 MPa),以降低驱动电场强度。
2. 结构稳定性与耐久性
多层界面结合力需强(如π-π键合CNT/弹性体,结合力≥4.12 N);循环寿命>1000次(如碳纳米管肌肉经1000次收缩后性能衰减<5%)。
3. 环境适应性
自愈能力:室温自愈(≤24小时)且修复后延展性>初始值90%;
生物相容性:植入式材料需无毒(如硅薄膜用于尿失禁治疗装置)。
4. 驱动性能

自供能驱动对材料性能的要求
(三)关键集成技术
1. 多能源兼容设计
如葡萄糖/氧气生物燃料电池与CNT肌肉集成,实现“燃料驱动-收缩”一体化。
2. 微纳制造工艺
交流电喷技术制备纳米硅膜(厚度<100 nm),支持大规模生产;静电纺丝+模板法构建同轴纤维肌肉(直径精度±5 μm)。
3. 智能响应结构
三层堆叠人造肌肉(导电层/绝缘层/导电层),电信号触发类肌肉收缩。
(四)挑战
自供能人工肌肉依赖多功能材料融合(如催化、导电、弹性)和精密制造技术。当前难点在于:
能量密度提升:生化驱动响应慢(分钟级),需开发高效催化剂;
长效稳定性:自愈后介电性能衰减(如弹性体A4循环后应变降至3%);
集成复杂度:固-液复合纤维的介电液封装难度大。
未来突破方向包括仿生能量管理(如线粒体供能模拟)和智能材料迭代(如可回收介电弹性体)。
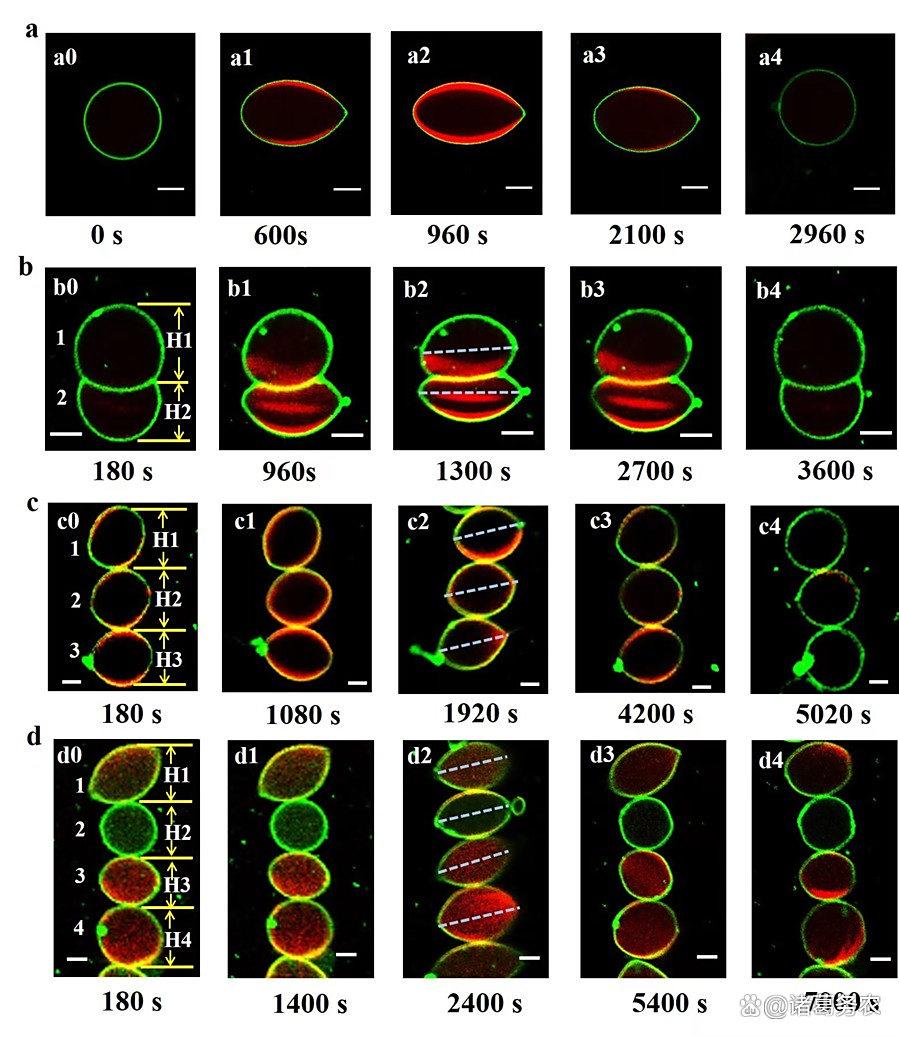
人造细胞群可逆形变模拟肌肉组织
三、自供能技术人工肌肉理想的材料应具备的性能特征
自供能人工肌肉作为融合能量转换与驱动功能的前沿技术,其发展受限于材料体系的瓶颈,同时也对理想材料提出了更高要求。
(一)当前材料与技术的核心限制
1. 能量转换效率低
光能驱动:如聚丙烯/炭黑多孔薄膜太阳能人工肌肉,光-机械能转换效率仅0.9%,难以支撑高功率需求。
机械能收集:摩擦纳米发电机(TENG)输出电流仅微安级,需复杂电路升压,能量损失显著。
生化能响应慢:线粒体-肌动蛋白系统需分钟级响应,催化效率不足。
2. 结构稳定性与耐久性不足
固-液界面失效:准固态弹性体(如SBS填充变压器油)中,介电液易泄漏,导致驱动失效。
动态键断裂:含配位键的自修复材料(如Zn²⁺-配体网络),机械训练后动态键断裂不可逆,循环寿命<1000次。
电极分层:多层纤维人工肌肉中,电极层与弹性硅胶界面结合力不足(需>4.12N),反复形变后剥离。
3. 驱动性能瓶颈

自供能驱动对材料技术瓶颈
4. 环境适应性缺陷
自修复能力有限:室温自愈需24小时,且修复后电导率衰减>30%(如液态金属电极)。
温湿度敏感:介电弹性体在低温下自愈失效(如-20℃自愈速度骤降)。
5. 制造工艺复杂度高
纳米级精度需求:多层硅薄膜堆叠需数千层,厚度控制<100nm,电喷工艺良率低。
纤维封装难题:同轴静电纺丝中,直径精度需±5μm,介电液灌注易产生气泡。
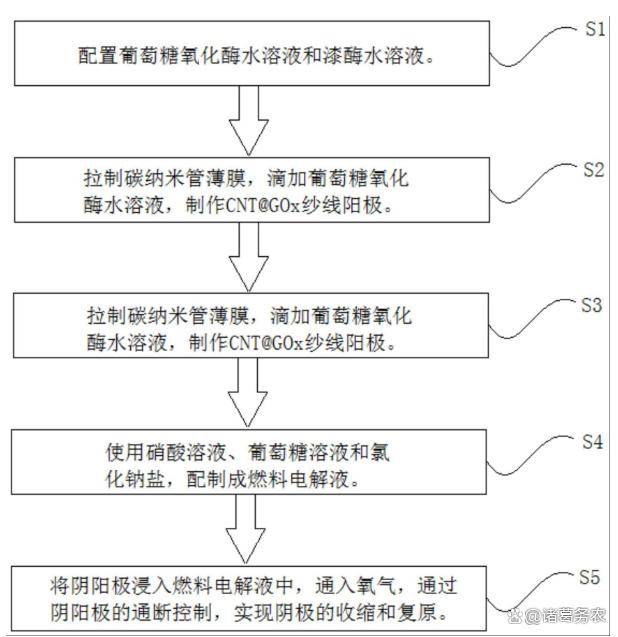
自供电碳纳米管纤维的制作方法与流程
(二)理想材料与技术的性能特征
1. 核心性能需求
1)高效能量转换
光驱动:宽光谱吸收(紫外-红外)且光热转化率>20%
机械能收集:TENG输出功率密度>10 W/m²,阻抗匹配优化
生化催化:酶修饰电极电流密度≥1 mA/cm²(如葡萄糖氧化酶/CNT系统)
2)稳定耐久结构
界面强化:π-π键合/氢键网络增强层间结合力(>5N)
自修复智能化:室温自愈时间≤1小时(如动态二硫键设计);损伤定位+焦耳热触发修复(液态金属电路集成)
3)仿生环境适应
宽温域工作:-30℃~90℃保持90%性能(如EPDM/木质素复合材料)
生物相容性:植入式材料通过ISO 10993毒性认证(如纳米硅薄膜尿道括约肌)
4)优异驱动性能

自供能驱动理想材料性能特征
5)可扩展制造
工艺兼容性:交流电喷技术实现纳米膜连续生产(厚度偏差<5%)
结构设计:增材制造+模板法构建多级孔道(毛细力锁定介电液)
(三)理想材料体系
1. 多功能复合材料
核壳纤维:热塑性弹性体(SBS/SEBS)多孔骨架 + 介电液(变压器油) → 支撑性与防泄漏兼顾
动态网络聚合物:金属配位键(Fe³⁺/羧基) + 可逆共价键(Diels-Alder) → 自适应应变强化
2. 仿生能量管理材料
线粒体仿生系统:ATP酶修饰碳管纤维,生化能-机械能直接转换
光合人工肌肉:叶绿素嵌入水凝胶,光驱动CO₂固定同步产功
(四)总结
1. 现状与理想性能对比表

自供能驱动材料性能现状与理想值差距
2. 突破方向
当前限制自供能人工肌肉的核心矛盾在于:能量转换效率、结构稳定性、驱动性能三者难以协同。理想材料需融合:
仿生能量管理:如线粒体-ATP供能机制,实现生化能直接驱动;
智能动态网络:牺牲键(配位键/氢键)耗散应力 + 自修复网络重构;
异质集成工艺:交流电喷纳米膜(降电压)+ 静电纺丝纤维(提精度)。
未来突破将依赖材料基因工程(高通量筛选催化剂/聚合物)与跨尺度制造(纳米膜-宏观器件一体化),最终实现“感知-供能-驱动”闭环的类生命系统。
电学自修复人工肌肉纤维
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。