系统介绍
易于部署,
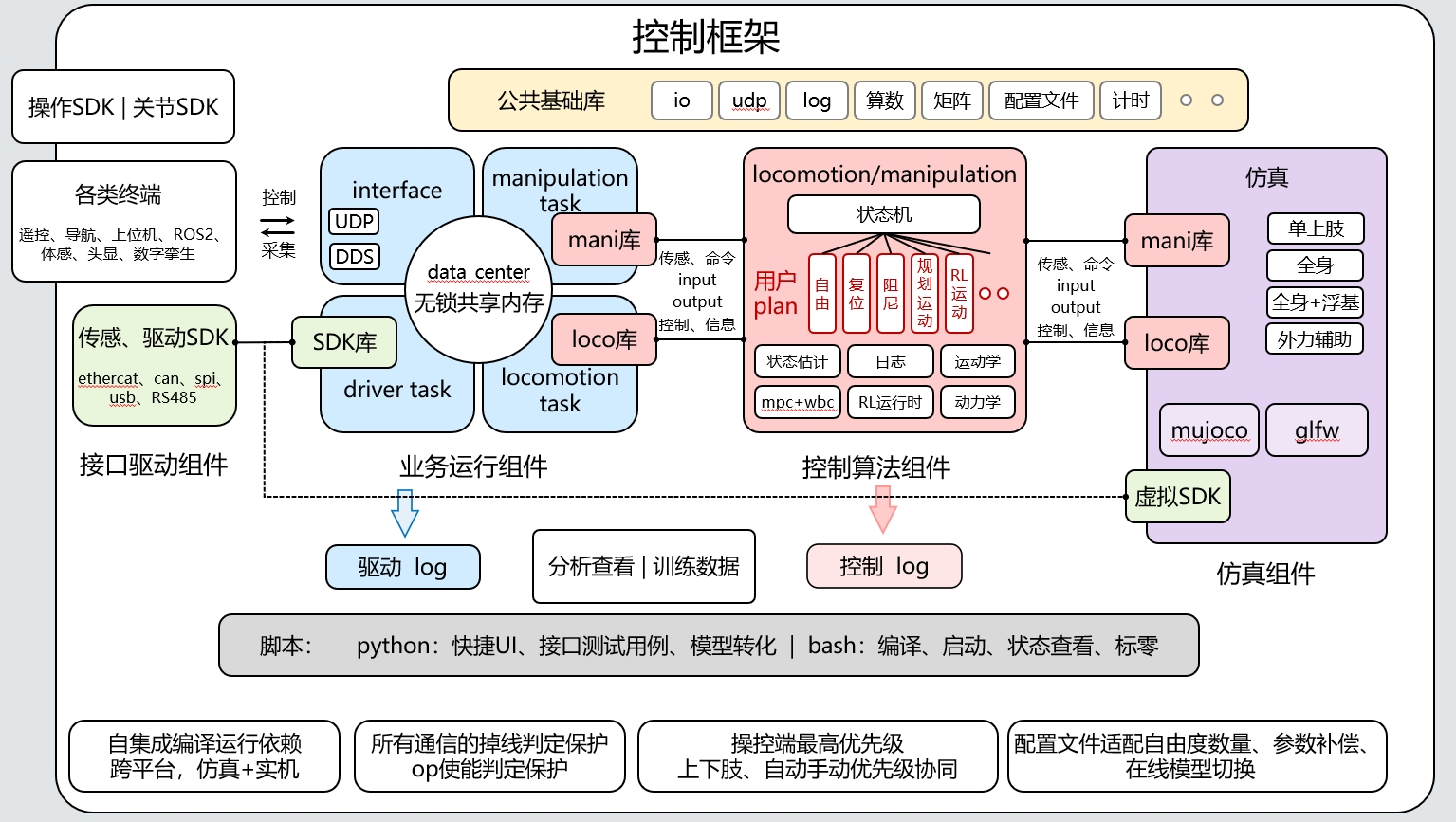
易于理解,人形控制框架结构采用分层模块化设计,提高了系统的可维护性和可扩展性。
易于分层结构,遵循功能模块封装的代码设计原则,采用总线进行模块之间的数据交互,减少封装冗余,有利于降低代码复杂度;算法实现采用“读-计算-写”的简单逻辑,提高了代码的可读性。
功能模块
模型预测+全身动力学控制
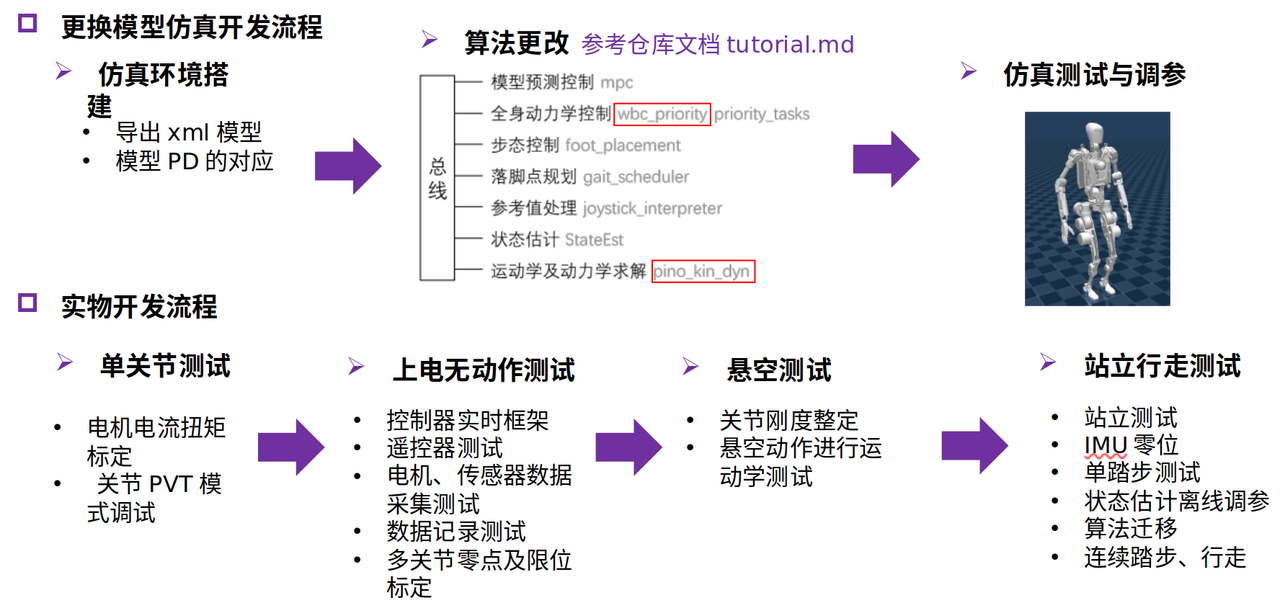
分层模块化的软件框架
软件框架结构采用分层模块化设计,系统各功能模块在逻辑和功能上具有明确的界限,提高系统的可维护性和可扩展性,为二次开发提供了更加友好的环境
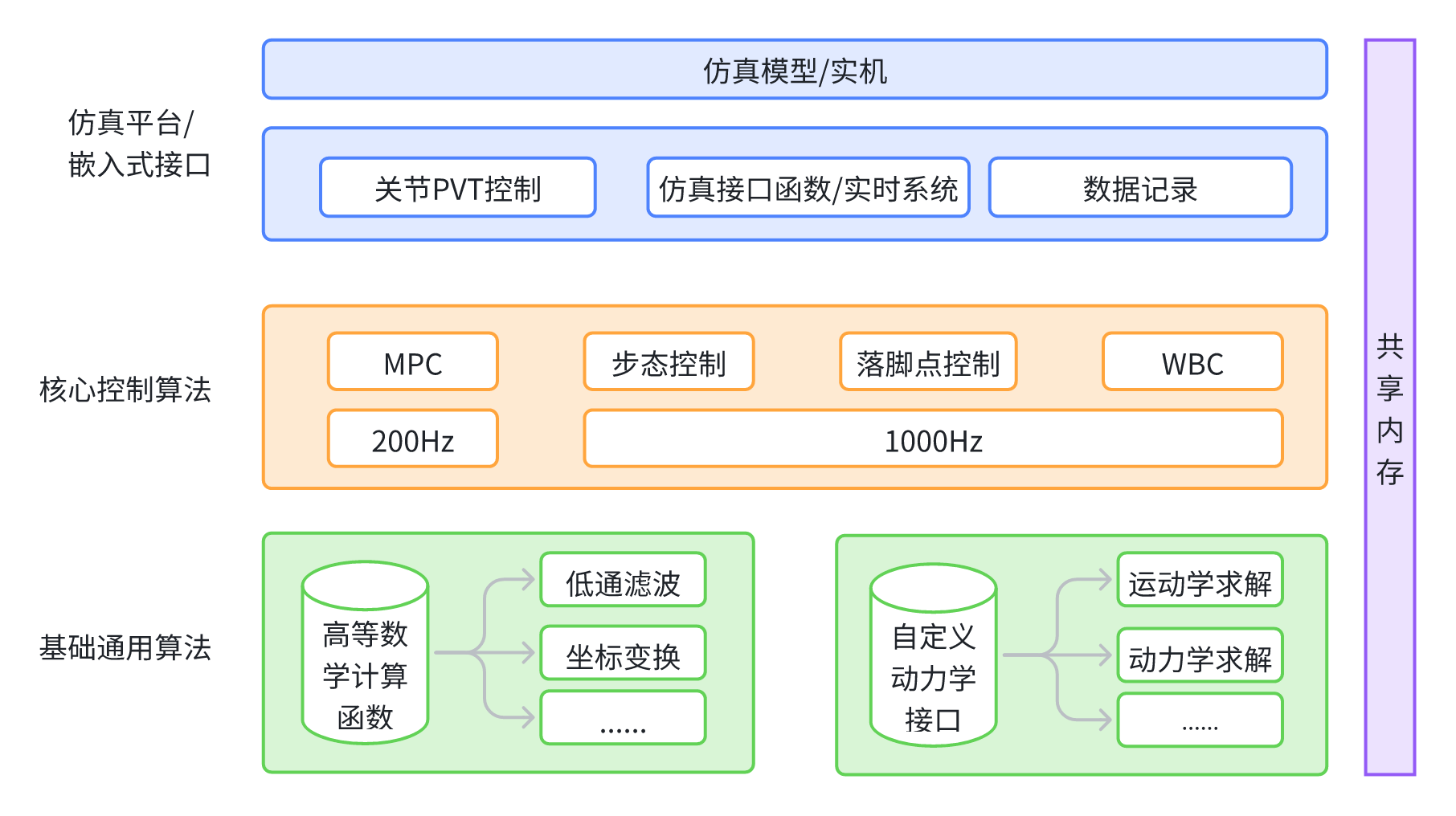
基于MPC+WBC的运动控制 (偏传统的,现在都RL)
高低层级结合的运动控制,高层级采用基于单刚体模型的MPC,低层级采用基于零空间映射的多任务优先级控制的WBC,提高机器人控制的稳定性,实现冗余自由度机器人的运动控制
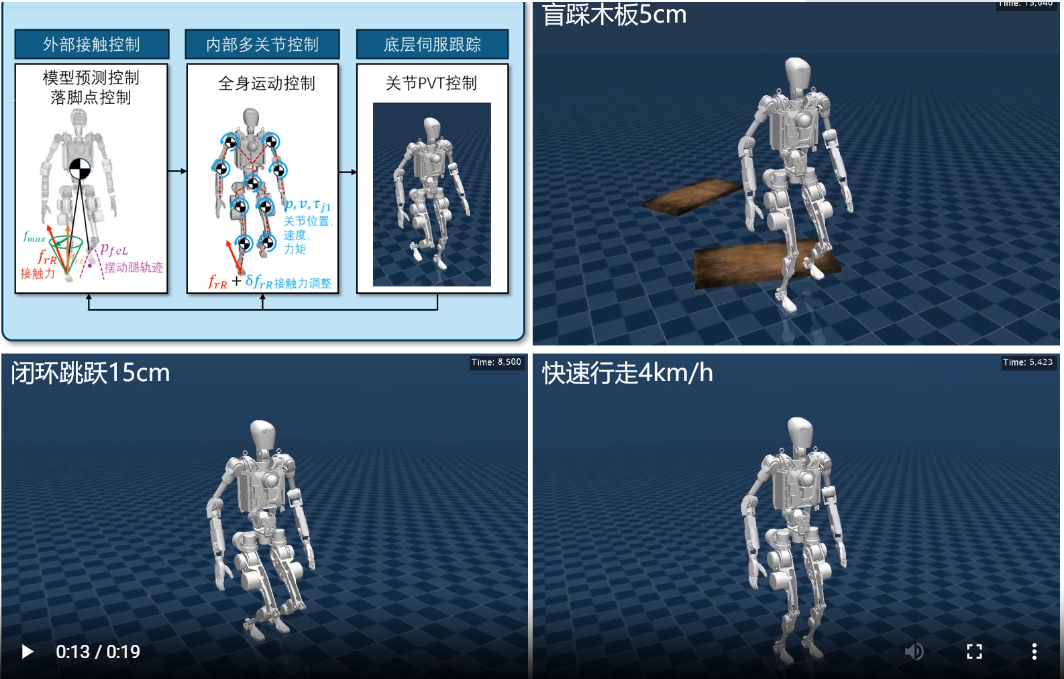
整个控制框架图,如下所示,算法分为:步态控制、外部接触控制、内部多关节协同控制、底层关节跟踪与感知模块。
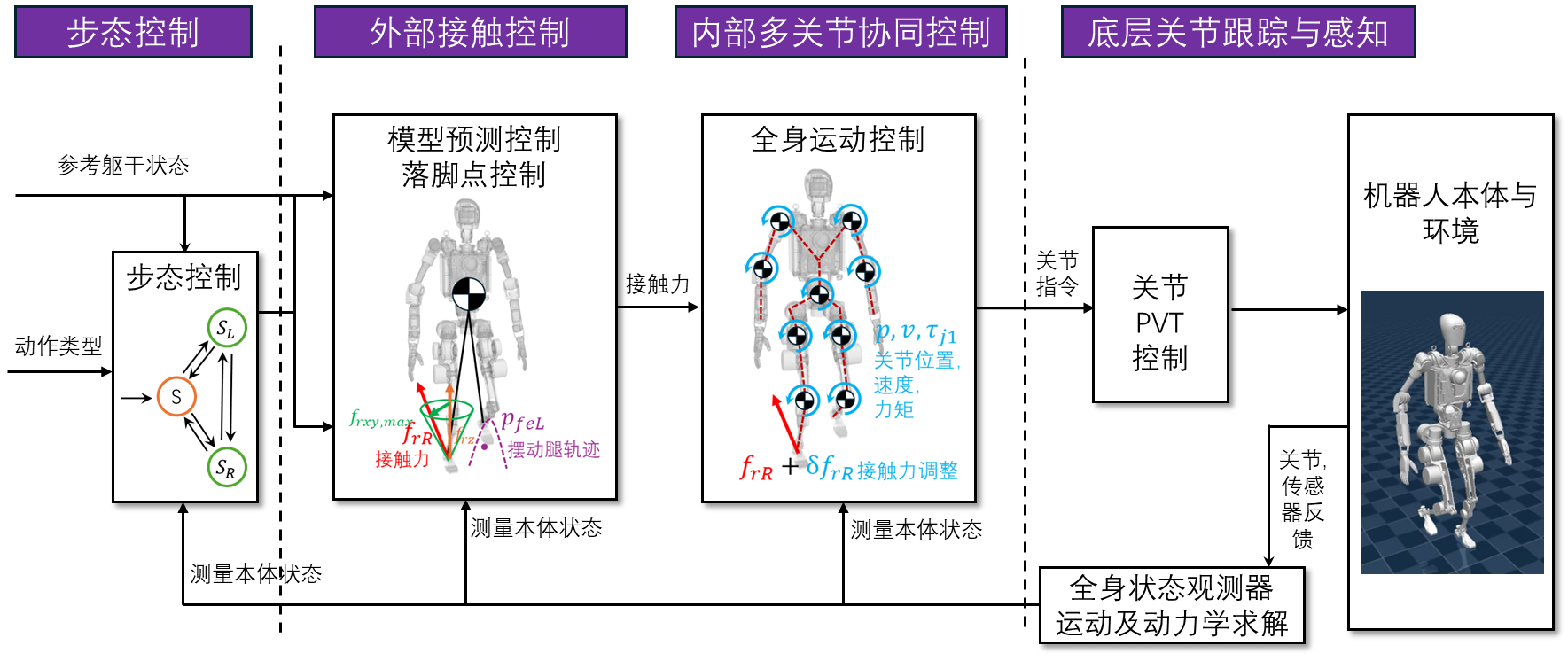
主要介绍下外部接触模块与内部多关节协同模块:
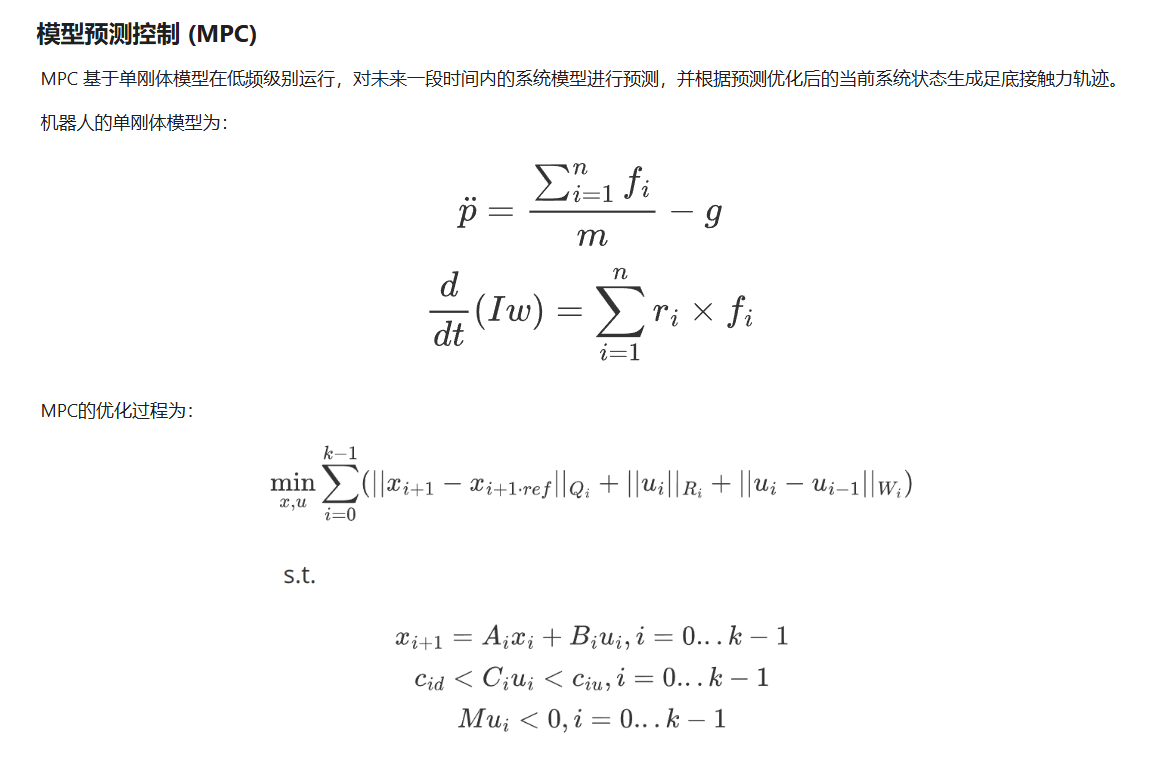
外部接触模块是基于单刚体模型,产生支撑腿的末端接触力及腾空腿的末端位置轨迹。其中:
(1)支撑腿采用模型预测控制即MPC,依靠QP,优化产生足底力,输入的系统状态为机身的姿态、位置、角速度与速度,优化目标有两个,一个是当前状态与期望的状态误差尽量小,一个是系统输入尽量小,即足底力与力矩尽量小,令系统能量输出较低,在该优化目标下设置了4组约束,
1组是z方向半封闭约束,即z方向力不能小于0的值,
2是摩擦力约束,利用摩擦锥约束,
3是防止足底反转与扭转的力矩约束,即防止足底力矩过大导致脚面反转或者扭转,采用的是QPOASES进行QP解算,在此优化目标与约束下,产生末端接触力。
(2)对于腾空腿,是应用的基于速度进行x,y方向落脚点计算的方法,具体的计算步骤在四足机器人控制中有详解,就不赘述了,z方向是由贝塞尔曲线组合成的相位可调的轨迹,曲线如下图所示,在相位末端z会延长一段,这是为了保证腾空腿触地。
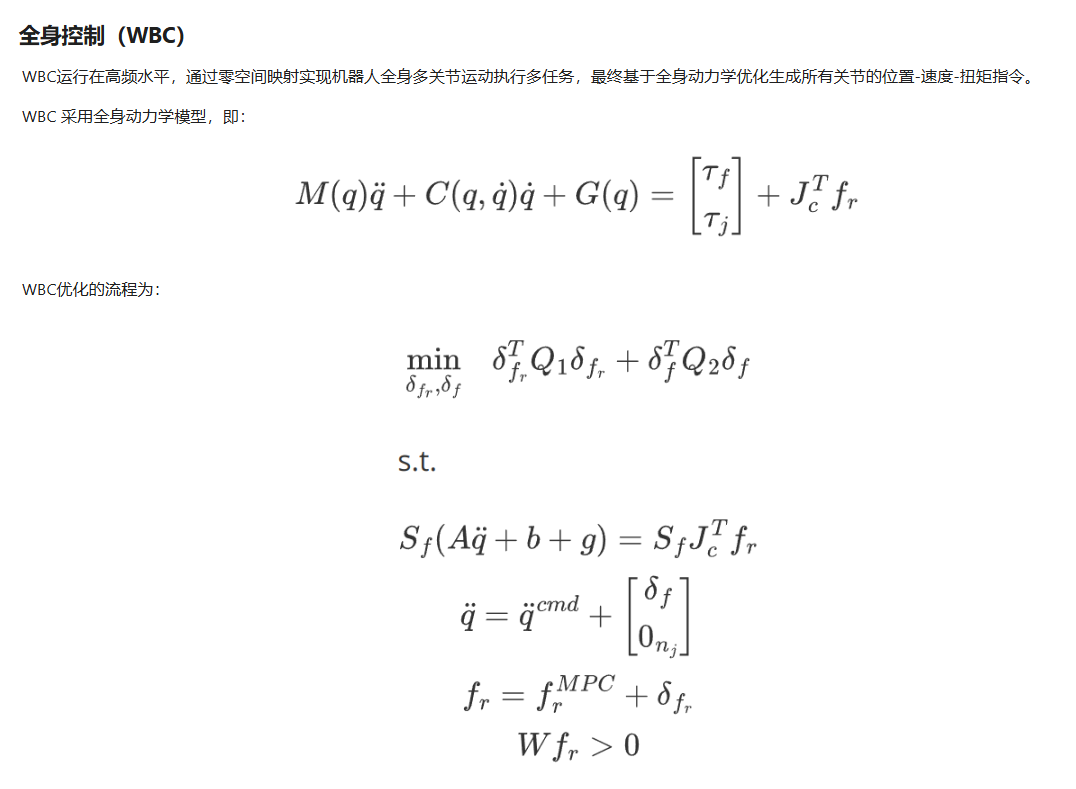
内部多关节协同控制,此部分主要是基于WBC,不同于前述的MPC,WBC是基于全身动力学模型的方法,将外部接触控制生成的末端力矩速度位置参考映射成为关节位置、速度、力矩参考。
他分为两个步骤:
第一,是运动学求解器(逆运动学),根据机身当前和期望状态,生成关节的位置、速度、加速度,这部分是应用基于零空间投影的多任务优先级控制方法,低优先级任务会在高优先级解的范围内寻找解,不会干扰到高优先级任务,实现冗余自由度机器人的控制,任务一般会分成以下几个,足底接触、机身位置、机身速度、摆动腿轨迹、手部关节控制、冗余关节,这些任务可以根据实际进行顺序的调节,经过几个任务的累加,生成关节的位置、速度、加速度;
第二,是动力学求解器,根据运动学求解器的输出还有期望的足底接触力,生成最终的关节参考,这里实际上是一个QP优化问题,对输入的期望足底接触力与关节的加速度的调节增量进行优化,设置动力学约束,来保证求解结果符合动力学模型,加入摩擦约束及接触力大小约束来保证求解结果在正常范围内,最终得到关节的位置、速度、力矩参考。
基于Pinocchio动力学库搭建的全身动力学框架
项目采用Pinocchio动力学库搭建了全部的模型预测控制与全身动力学模型,可以实现基于URDF模型的快速动力学参数调整
pinocchio仓库基于C++的开源动力学求解库,同时也提供了python的接口,可以根据输入的URDF模型进行机器人运动学及动力学的参数计算,相关安装步骤可参考官网,也可使用openloong-dyn-control中的third party
具体功能如下:
动力学方程参数的求解;
逆运动学解算;
正运动学求解;
雅可比矩阵求解。
Pinocchio在以上模块中的底层关节跟踪与感知模块中,其计算结果在控制算法中主要作用:
一个是正逆运动学的求解,其获取的末端位置在摆动腿轨迹计算、WBC的任务优先级计算等模块都有应用,
第二是任务优先级中的雅可比矩阵的获取,
第三是WBC的QP求解中需要动力学约束,这里应用了pinocchio库计算的动力学方程参数,
第四是状态估计中的足底力估计,也是应用到了动力学方程参数。
关于pinocchio应用的注意点如下所示:
1、由于人形机器人是个浮动基,q包含了质心位置、质心姿态、关节位置信息,其中前7个为浮动基的数据,浮动基的姿态采用四元数,因此q比dq多一维;
2、pinocchio中默认的关节顺序,是根据urdf中joint的名字及串联关系确定的,先根据串联关系,然后根据其首字母进行排列;
3、输入pinocchio的dq浮动基速度为本体坐标系下的速度;
4、urdf关节类型要选revolute而不是continuous,不然会q的个数会多一个;
5、获取雅可比的三种坐标形式,pinocchio中的雅可比有三种坐标形式,分别是WORLD、LOCAL、LOCAL_WORLD_ALIGNED,在获取雅可比时选取何种坐标决定了雅可比根据dq计算出的末端速度是在哪个坐标系下,
world坐标系是坐标轴朝向与世界坐标系平行,原点位于机身最初的base处,
local的坐标与雅可比求解的末端坐标重合,例如我们获取的是脚踝的雅可比,则local坐标系即与脚踝的坐标重合,
LOCAL_WORLD_ALIGNED的坐标系是指坐标轴朝向与世界一致,坐标轴原点与脚踝坐标系原点重合,openloong程序中雅可比应用的是LOCAL_WORLD_ALIGNED,因为程序中用的都是末端在世界坐标下的速度,而这个坐标系的坐标轴朝向与世界相同,因此速度符合算法中的要求。
6、逆运动学的求解,pinocchio官网中提供了一种闭环逆运动学的求解方法,迭代获得解,要注意为了避免奇异点问题,采用阻尼伪逆,这种方式能够减少求解时的震荡,官网中有逆运动学的范例程序,可以先用其中的默认值,如果出现求解问题,可以调节DT与参数,前面说DT类似于Kp,那就有类似于阻尼的作用,即Kd的作用,大家可以根据pd的作用机理去调节这两个参数。
Mujoco仿真环境
URDF文件
项目提供了青龙人形机器人包含上肢与下肢的全身URDF,同时面向mujoco仿真环境提供了XML模型文件
多样化的仿真场景
项目提供了多样化的仿真测试场景,双臂作业场景与模型
标准化的接口
项目面向运动捕捉操控构建了与实物样机一致的开发接口,可以实现在仿真环境下的示教与数据收集
可视化与调试工具
plot画图工具
可以完成对运动控制数据的绘制,提高调试开发效率
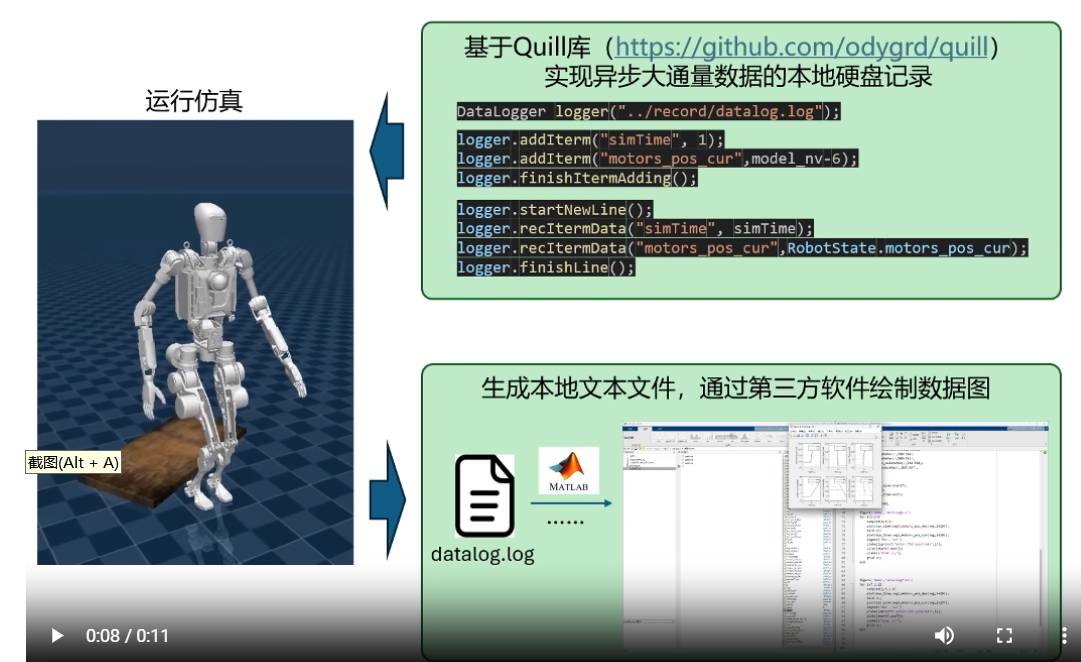
数据记录
提供了对仿真数据记录的工具,方便对数据进行后处理与分析
数据集
提供了面向模仿学习双臂作业数据存储的接口,方便在仿真中开发具身智能算法
开发基础知识
以下内容进行仔细分解
PVT 控制:PVT 控制的核心是 **“轨迹预先生成”**:
在运动开始前,根据目标位置、运动约束(如最大速度、加速度),计算出一条连续的轨迹,该轨迹上每个时刻的位置、速度均被明确定义。运动过程中,控制器只需按预设的时间点输出对应的位置指令,即可驱动执行机构(如电机)沿规划轨迹运动。
- 位置(P):某一时刻执行机构应到达的空间坐标(如笛卡尔坐标系中的 X/Y/Z 值,或旋转轴的角度)。
- 速度(V):对应时刻的运动速率(需与位置轨迹的斜率匹配,确保速度连续)。
- 时间(T):每个位置和速度对应的时间节点(形成时间序列,如 t₀、t₁、t₂...)。
关键控制参数
模型预测控制参数 (MPC parameters)
//MPC.h
void set_weight(double u_weight, Eigen::MatrixXd L_diag, Eigen::MatrixXd K_diag);
//_u_weight_ : the minimal weight of control input
//_L_diag_ : the weight of error compared to desired values, following the order (eul, pos, omega, vel)
//_K_diag_ : the weight of control input, following the order (fl, tl, fr, tr)
全身控制优先级 (WBC priority)
//WBC_QP.cpp
std::vector<std::string taskOrder;
taskOrder.emplace_back("RedundantJoints");
taskOrder.emplace_back("static_Contact");
taskOrder.emplace_back("Roll_Pitch_Yaw_Pz");
taskOrder.emplace_back("PxPy");
taskOrder.emplace_back("SwingLeg");
taskOrder.emplace_back("HandTrack");
全身控制重量 (WBC weight)
//PriorityTasks.h
Eigen::MatrixXd Kp; //weight of position error
Eigen::MatrixXd Kd; //weight of velocity eror
//WBC_QP.h
Eigen::MatrixXd Q1; //weight of the contact force error compared to desired, following the order (fl, tl, fr, tr)
Eigen::MatrixXd Q2; //weight of the acceleration tracking error
摆腿轨迹 (Swing leg trajectory)
//FootPlacement.h
double kp_vx; //x-direction footplacement parameter
double kp_vy; //y-direction footplacement parameter
double kp_wz; //z-direction posture parameter
double stepHeight; //the maximal step height
//FootPlacement.cpp
double FootPlacement::Trajectory(double phase, double des1, double des2); //z-direction posture trajectory
//phase:the phase when reaching the highest
//des1:the highest position along the trajectory
//des2:the final position of the trajectory
步态控制 (Gait control)
//GaitScheduler.h
double tSwing; //the time of one step
double FzThrehold; //the maximal force when touching the ground
//GaitScheduler.cpp
DataBus::LegState legState=DataBus::RSt; //the first step state
关节参数 (Joint parameter)
//JointCtrConfig.json
"Joint-ankle-l-pitch" : {
"PVT_LPF_Fc" : 20,
"kd" : 5.0,
"kp" : 50.0,
"maxPos" : 0.61087,
"maxSpeed" : 48.8,
"maxTorque" : 58.5,
"minPos" : -0.43644
}更换机器人模型说明
模型文件
1. XML文件准备
准备机器人的urdf(.urdf)文件和mesh文件(.stl),用于添加mujoco编译标签
<mujoco>
<compiler
meshdir="meshes/"
balanceinertia="true"
discardvisual="false" />
</mujoco>
将工作目录更改为mujoco-3.x.x/bin,运行命令:
./simulate
将urdf文件拖入仿真界面,模型显示正确后保存xml文件。您应该记下网格文件的路径。
您还可以参考 Mujoco官方文档来设置 compiler, option 或者 asset 等标签连来设置 body, actuator 和 sensor 等。
| 父标签 | 子标签 |
|---|---|
| worldbody | 定义灯光、相机、地板和机器人(惯性、关节、自由关节、几何、场地、相机、灯光等) |
| actuator | 定义执行器(电机、位置、速度等) |
| sensor | 定义传感器并调整传感器参数(例如噪声) |
2. 更换型号
以“青龙机器人”为例,base_link 下有4个并联的串联连接:头部 Link_head、腰部 Link_waist、左臂 Linkarm_l、右臂 Link_arm_r 分支。左臂和右臂分支各有 7 个自由度,头部分支有 2 个自由度。腰部分支有3个自由度包括 pitchLink_waist_pitch、rollLink_waist_roll、yawLink_waist_yaw等,左腿和右腿分支并联,每条腿依次连接3个髋关节 Link_hip、1个膝关节 Link_knee、2个踝关节 Link_ankle 总共有 6 个自由度。这样就完成了全部31个自由度的配置。
您可以参考此配置并尝试自定义您的配置。
<worldbody>
<body name="base_link" pos="x x x">
<freejoint name="float_base" />
<body name="body1" pos="x x x">
<inertial pos="x x x" quat="x x x" mass="x" diaginertia="x x x"/>
<joint name="joint1" pos="0 0 0" axis="1 0 0" limited="true" range="x x"/>
<geom type="mesh" contype="0" conaffinity="0" group="1" density="0" rgba="x x x 1" mesh="body1"/>
<geom type="mesh" rgba="x x x 1" mesh="body1"/>
<body name="body2" pos="x x x">
...
<joint name="joint2" .../>
...
</body>
</body>
<body name="body3" pos="x x x">
...
<joint name="joint3" .../>
...
</body>
</body>
</worldbody>
本例中,base_link下并联了两个分支,一个分支由body1和body2串联组成,另一个分支由body3组成。如果机器人有浮动底座,则在上面名为base_link的body下添加自由关节freejoint。如果机器人是固定底座,请拆下freejoint。或者,如果需要,可以在模型配置阶段屏蔽freejoint。
该项目为 31 个关节中的每一个关节设置执行器。
<actuator>
<motor name="motor1" joint="joint1" gear="x" ctrllimited="true" ctrlrange="x x"/>
...
</actuator>
用户可以根据机器人的自由度在活动关节处定义相应的执行器。
该项目配置了四元数framequat、测速仪velocimeter、角速度仪陀螺仪gyro、加速度计accelerometer等传感器,安装在body标签中已经定义的site,可以根据touch、force、torque、jointpos、jointvel、actuatorfrc、actuatorfrc的需要添加。可根据需要添加force、torque、jointpos、jointvel、actuatorfrc等传感器。
<sensor>
<framequat name="xx" objtype="site" objname="imu" />
<velocimeter name="xx" site="imu" />
<gyro name="xx" site="imu" />
<accelerometer name="xx" site="imu" />
</sensor>
除了自由度配置、执行器配置、传感器配置之外,其他更具体的参数修改可以参考Mojoco官方文档。
控制代码和Mujoco接口
使用函数 mj_loadXML、mj_makeData 获取 mjModel、mjData 结构体。您可以参考文档了解 mjModel、mjData、mjOption 的更多详细信息。
mjModel* mj_model = mj_loadXML("../Models/xxx.xml", 0, error, 1000);
mjData* mj_data = mj_makeData(mj_model);
mj_model->nv 是广义速度坐标的维数,即浮动底座的线速度、角速度、旋转型31个关节的速度。项目程序框架中与自由度相关的变量对应于mj_model->nv-6,动力学库会根据URDF自动获取机器人自由度的尺寸,其中定义了所有尺寸信息。这样用户就不用在程序中手动修改了。
由于本项目对body、joint、motor等部件地址的访问依赖于查询名称字符串并锁定地址,因此当修改某个部件时,不会影响其他body、joint的数据读写,相比直接索引编号为修改模型提供了便利。修改模型中某自由度控制参数时,只需修改MJ_Interface.h的JointName、Pin_KinDyn.h的motorName、PVT_Ctr.h的motorName以及JointCtrConfig.json文件中某自由度名称对应的变量即可。例如,要修改J_waist_pitch的刚度,需要修改JointCtrConfig.json中的J_waist_pitch和对应的PD参数,J_waist_pitch的名称对应xml文件中的joint名称、motor名称。
传感器数据地址也是通过查询名称字符串找到地址来访问的,添加或删除传感器可以通过修改MJ_Interface.h中相应的传感器名称来完成。
缩写表:
| 前缀/后缀 | 含义 |
|---|---|
| _L, _W | 局部框架、世界框架 |
| fe_ | 脚端 |
| _L, _l, _R, _r | 左,右 |
| swing, sw | 摆腿 |
| stance, st | 站立腿 |
| eul, rpy | 用欧拉角表示的角位置 |
| omega | 角速度 |
| pos | 线性位置 |
| vel | 线速度 |
| tor, tau | 接头处的扭矩 |
| base | 基础链接 |
| _des | 期望值 |
| _cur | 当前值 |
| _rot | 旋转矩阵 |
控制框架