大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。本篇文章宣传一下本人的最新工作Onion-LO,代码已开源,欢迎大家使用评价。博主创建了一个科研互助群Q:951026257,欢迎大家加入讨论。
Onion-LO: Why Does LiDAR Odometry Fail Across Different LiDAR Types and Scenarios?
论文地址:Onion-LO: Why Does LiDAR Odometry Fail Across Different LiDAR Types and Scenarios? | IEEE Journals & Magazine | IEEE Xplore
代码:GitHub - huashu996/Onion-LO
摘要
激光雷达里程计是自动导航中的一项基础技术。然而,现有的基于激光雷达的里程计方法通常需要大量人工参数调试,并且在不同类型的激光雷达和环境中部署时仍容易出现不稳定。本文聚焦于点云的本质,提出了一种快速、高度自适应且鲁棒的激光雷达里程计框架——Onion-LO。Onion-LO 展现出对多种激光雷达类型的强兼容性,并能在多样化场景中稳定运行。这得益于一种类似洋葱结构的点云处理机制——Onion Ball。Onion Ball 支持多线程实现,能够高效地执行点云分布分析、分割与降采样。此外,我们设计了一种自适应优化策略用于局部地图管理与迭代优化,有效提升了系统的鲁棒性与精度。基于五个数据集的大量实验表明,Onion-LO 在定位精度和鲁棒性方面优于现有的最新方法。进一步在 11 种激光雷达和 8 种不同场景下的评估也验证了其强大的泛化能力。我们的方法面向实际部署,支持车载处理器上的实时运行。
一、动机
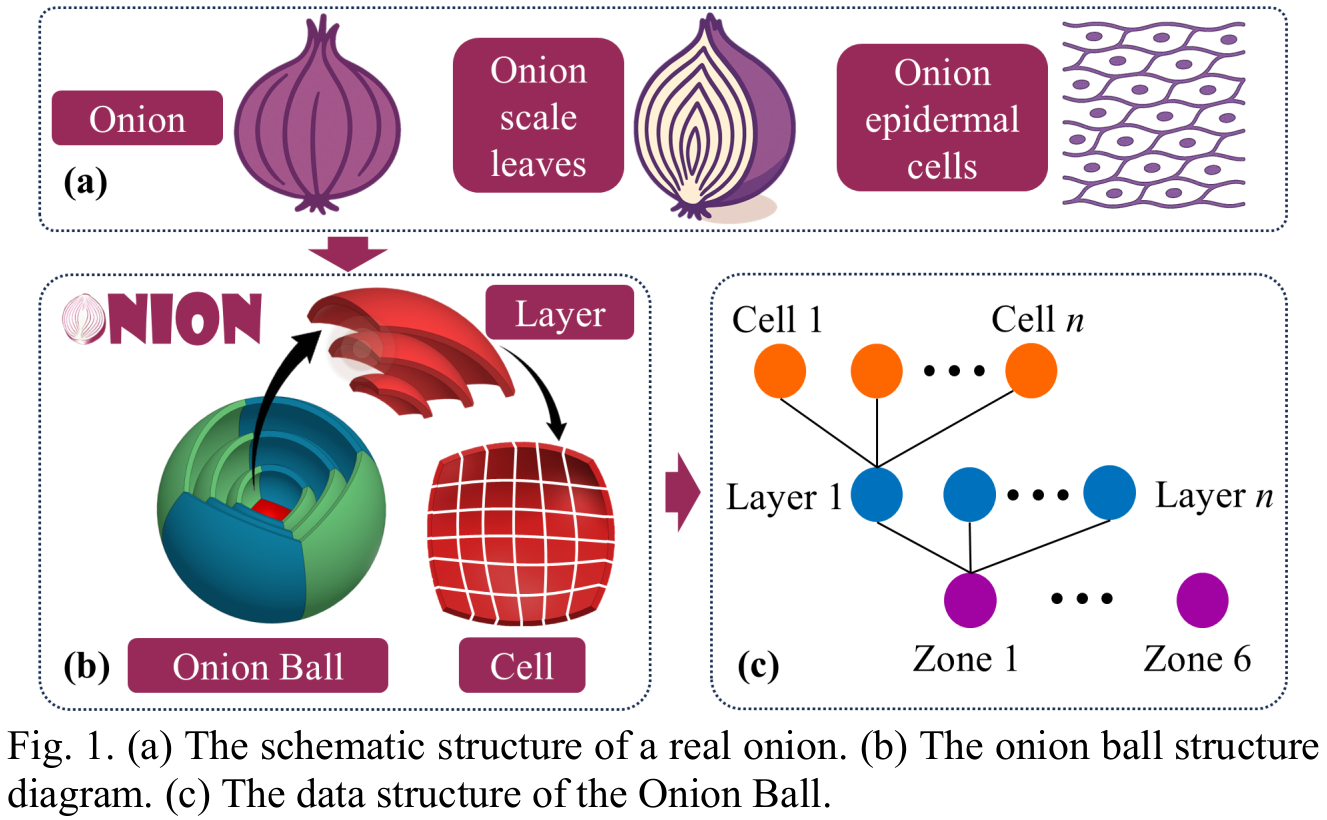
相信大家在使用很多算法时候,往往很难跑出较好的效果,同时需要调整复杂的系统参数。一旦更换场景和激光雷达类型,都需要重新适配调整参数,这样的体验很不好。能不能有一个通用的激光里程计框架,能够支持市面上大多数激光雷达,同时在场景尺度变化的环境依然能够稳定运行。本文受到洋葱结构的灵感,提出了一个具有高适配性的框架——Onion-LO
二、方法
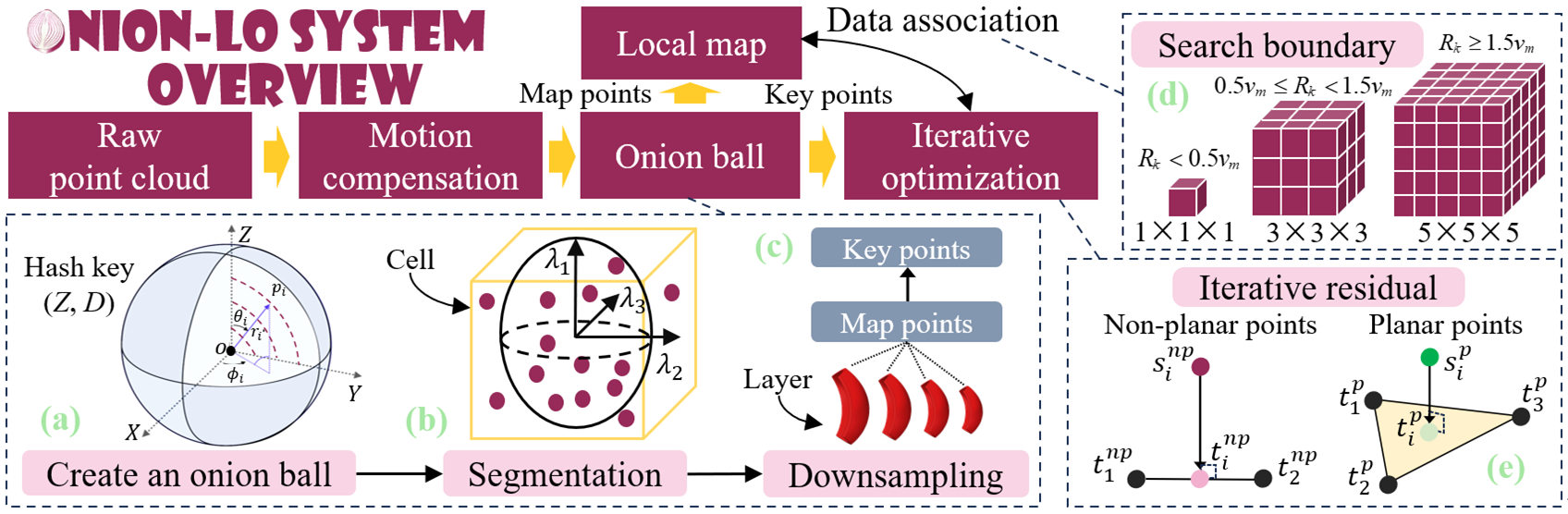
系统流程如图所示。原始点云首先经过去畸变处理,并输入 Onion Ball。Onion Ball 将每个单元分割为平面点和非平面点,并计算当前帧的 onion 因子。随后,对各层进行多线程降采样,以获得地图点和关键点。地图点被存储在局部地图中,用于与关键点进行匹配。最后,通过自适应点到点迭代优化获得鲁棒的位姿。
三、实验
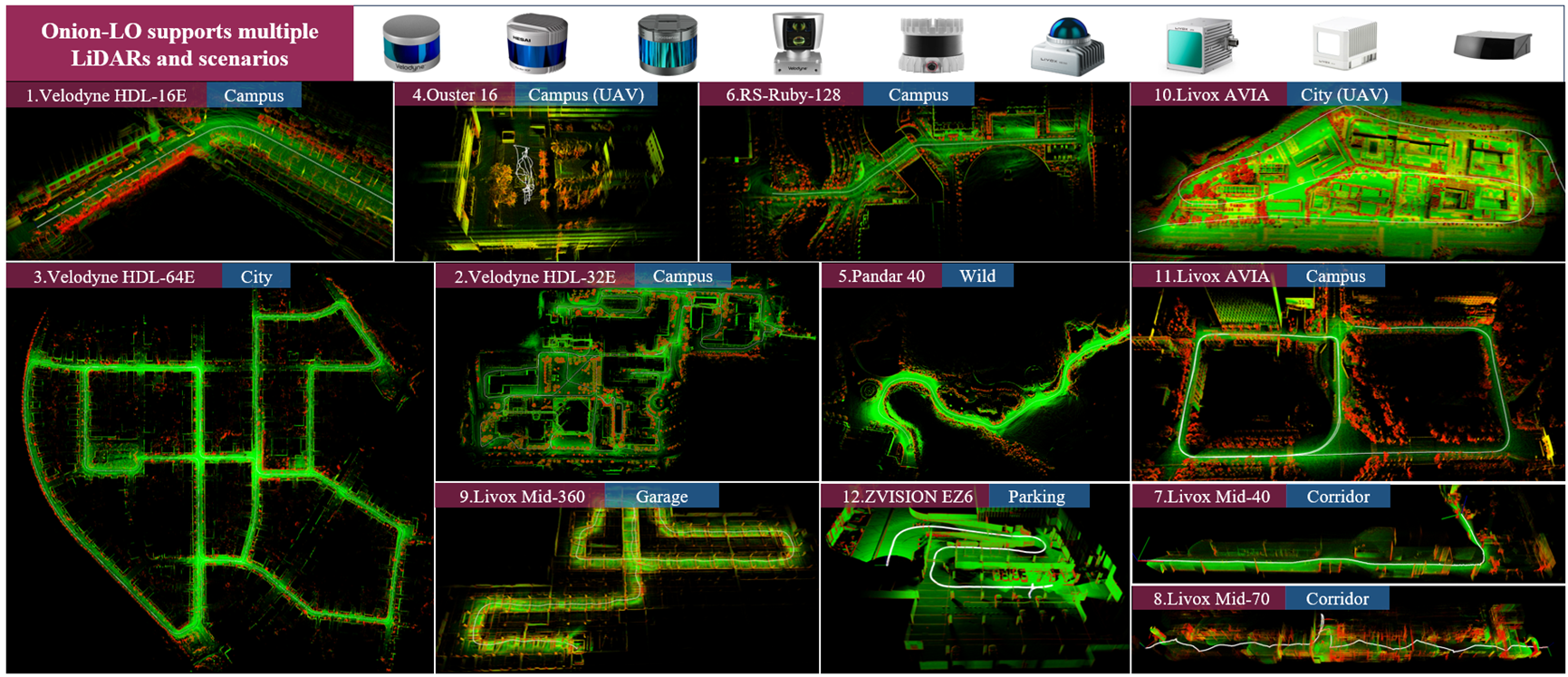
支持市面上常见的激光雷达,同时能够在无人机、手持、狭小空间、无人驾驶场景中稳健运行。
在没有刻意调参的情况下,在KITTI数据集的表现