DETR 论文笔记
End-to-End Object Detection with Transformers(ECCV 2020)
摘要
- 动机:传统方法性能受到了NMS、anchor generator等步骤的影响
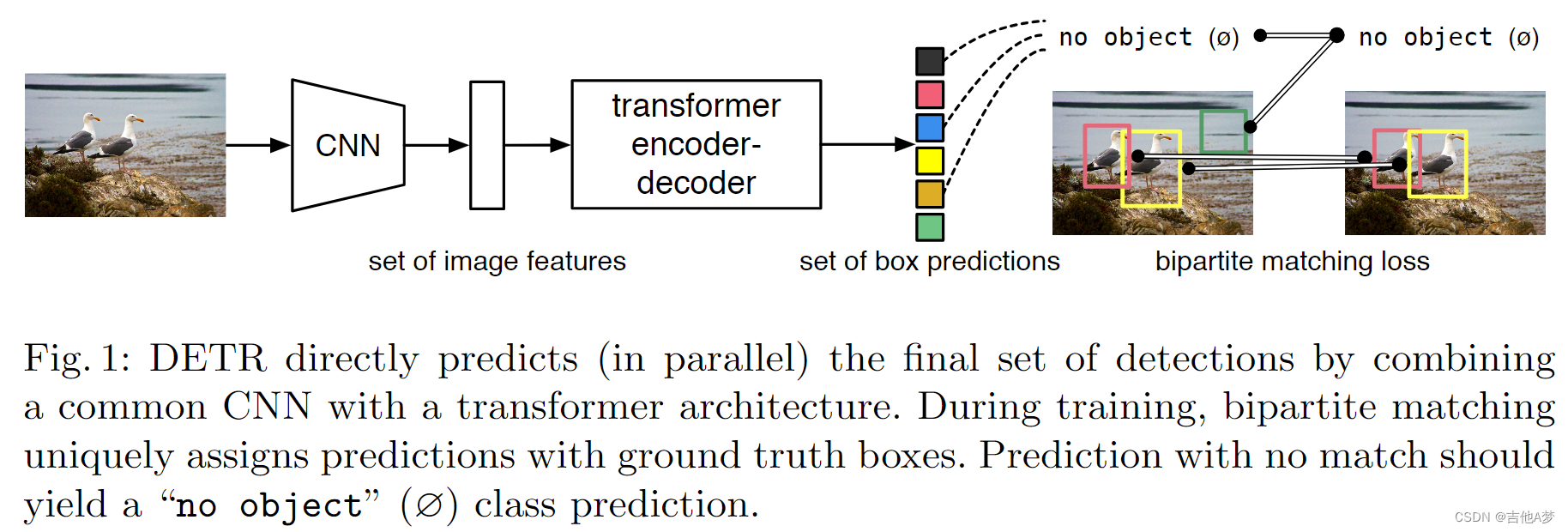
- 解决方案:DETR使用基于集合的全局损失,通过二分匹配以及transformer encoder-decoder架构进行预测:DETR 预测 目标和全局上下文 的关系以直接并行输出最终的预测集
引言
- 与传统检测器的对比:DETR 一次预测所有object,并使用一组损失函数进行end-to-end训练,该函数在预测对象和真实对象之间执行二分匹配
- 与集合预测工作相比:DETR的结合了二分匹配损失 和 基于并行解码(非自回归)的transformer。以前主要是用RNN进行自回归解码。匹配损失函数将预测结果唯一地分配给gt,并且对预测对象的排列组合是不变的,因此可以并行处理
相关工作
集合预测
- 最常见的集合预测任务是多标签分类,其存在的困难是避免重复(例如NMS干的事情),解决这个困难的办法是根据匈牙利算法设计一个损失,找到gt和预测之间的二分匹配(匈牙利算法可以参考链接)
DETR 模型
集合预测损失(Object detection set prediction loss)
- 二分匹配损失: y y y 是目标的 gt 集合, y ^ = { y ^ i } i = 1 N \hat y=\{\hat y_i\}_{i=1}^{N} y^={y^i}i=1N 是 N N N 个预测值, N N N 远大于图片中的 gt 个数,同时将 y y y 视为大小为 N 并用 ∅ 填充的集合(无对象)。为了找到这两个集合的二分匹配,搜索一个具有最低成本的排列(这一部分看不懂的话,看一下匈牙利算法就能理解了,其实就是找一种匹配方法使得匹配损失最小)
σ ^ = a r g m i n σ ∈ S N ∑ i N L m a t c h ( y i , y ^ σ ( i ) ) \hat\sigma={argmin}_{\sigma\in\mathfrak S_N}\sum_i^N \mathcal L_{match}(y_i,\hat y_{\sigma(i)}) σ^=argminσ∈SNi∑NLmatch(yi,y^σ(i))
其中 L m a t c h ( y i , y ^ σ ( i ) ) L_{match}(y_i,\hat y_{\sigma(i)}) Lmatch(yi,y^σ(i)) 是gt y i y_i yi 和预测索引为 σ ( i ) \sigma(i) σ(i) 的预测框之间的匹配损失 - L m a t c h L_{match} Lmatch:匹配损失考虑了类别预测和 预测框与gt框 的相似性。gt 集合每一个元素 i i i 可以看做是 y i = ( c i , b i ) y_i=(c_i,b_i) yi=(ci,bi) ,其中 c i c_i ci 是类标签(可能是 ∅ ∅ ∅), b i ∈ [ 0 , 1 ] 4 b_i\in[0,1]^4 bi∈[0,1]4 是定义 gt 框的中心坐标和其相对于图像尺寸的高度和宽度的向量。对于索引为 σ ( i ) \sigma(i) σ(i) 的预测,将 c i c_i ci 类的概率定义为 p ^ σ ( i ) ( c i ) \hat p_{\sigma(i)}(c_i) p^σ(i)(ci),并将预测框定义为 b ^ σ ( i ) \hat b_{\sigma(i)} b^σ(i),定义 L m a t c h ( y i , y ^ σ ( i ) ) L_{match}(y_i,\hat y_{\sigma(i)}) Lmatch(yi,y^σ(i))为 − L { c i ≠ ∅ } p ^ σ ( i ) ( c i ) + L { c i ≠ ∅ } L b o x ( b i , b ^ σ ( i ) ) -\mathbb L_{\{c_i\neq∅\}}\hat p_{\sigma(i)}(c_i)+\mathbb L_{\{c_i\neq∅\}}\mathcal L_{box}(b_i,\hat b_{\sigma(i)}) −L{ci=∅}p^σ(i)(ci)+L{ci=∅}Lbox(bi,b^σ(i))
- L H u n g a r i a n ( y , y ^ ) L_{Hungarian}(y,\hat y) LHungarian(y,y^):

- L b o x \mathcal L_{box} Lbox:

DETR 结构
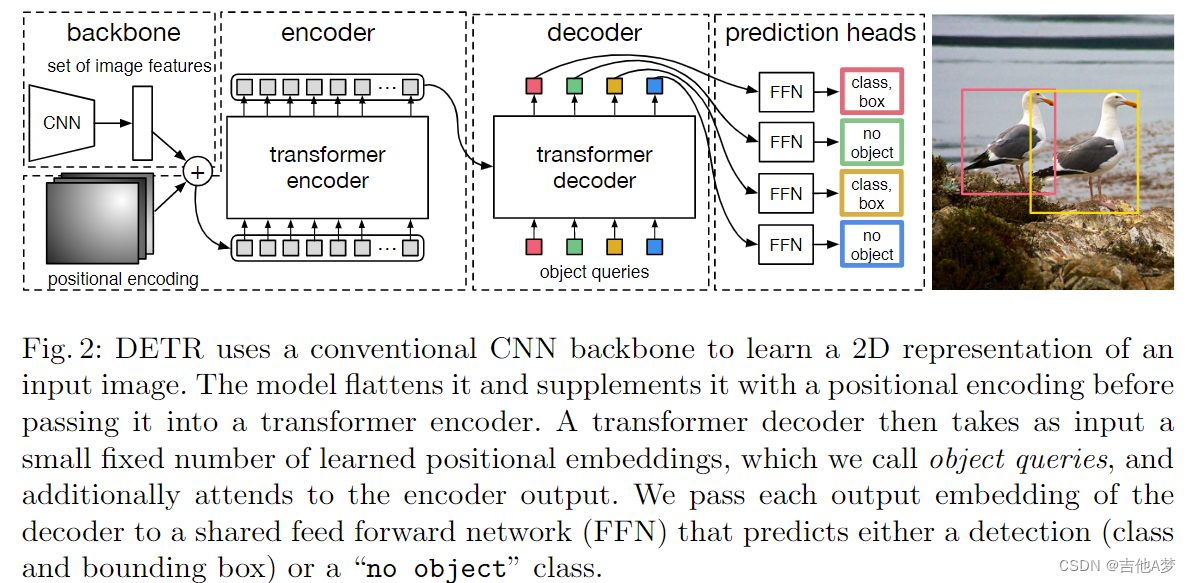
- Backbone:原始图片 x i m g ∈ R 3 × H 0 × R 0 x_{img}\in\mathbb R^{3×H_0×R_0} ximg∈R3×H0×R0,使用一个 CNN 生成特征图 f ∈ R C × H × W f\in\mathbb R^{C×H×W} f∈RC×H×W,典型值为 C = 2048 , H , W = H 0 32 , W 0 32 C=2048,H,W=\frac{H_0}{32},\frac{W_0}{32} C=2048,H,W=32H0,32W0
- Transformer encoder:
- 1 x 1 1x1 1x1 卷积将 f f f 的通道维度从 C C C 减少到更小的维度 d d d,得到新特征图 z 0 ∈ R d × H × W z_0 ∈\mathbb R^{d×H×W} z0∈Rd×H×W
- encoder需要一个序列作为输入,因此我们将 z 0 z_0 z0 的空间维度折叠为一个维度,从而得到一个 d × H W d×HW d×HW 特征图
- 每个 encoder 层都有一个标准架构,由一个多头自注意力模块和一个前馈网络(FFN)组成。由于 Transformer 架构是置换不变的,我们用固定的位置编码来补充它,这些编码被添加到每个注意力层的输入中
- Transformer decoder:
- 解码器使用多头自注意机制转换长度为 d d d 的 N N N 个嵌入序列。DETR模型在每个decoder层并行解码 N N N 个对象,而自回归模型一次只能处理一个对象。
- 往 N N N 个嵌入序列中加入 positional encoding,并被注意力机制处理。然后通过前馈网络将它们独立解码为框坐标和类标签,从而产生 N N N 个最终预测。
- Prediction feed-forward networks(FFNs):
- 最终预测由具有 ReLU 激活函数和隐藏维度 d d d 的 3 层感知器和线性投影层计算。
- FFN 预测 框的归一化中心坐标、高度和宽度。线性投影层使用 softmax 函数预测类标签。
- 由于我们预测了一组固定大小的 N N N 个边界框,其中 N N N 通常远大于图像中感兴趣对象的实际数量,因此使用了一个额外的特殊类标签 ∅ ∅ ∅ 来表示在一个范围内没有检测到任何对象。该类与标准对象检测方法中的“背景”类的作用相似
实验
- 对比 Faster R-CNN

- encoder 大小的影响

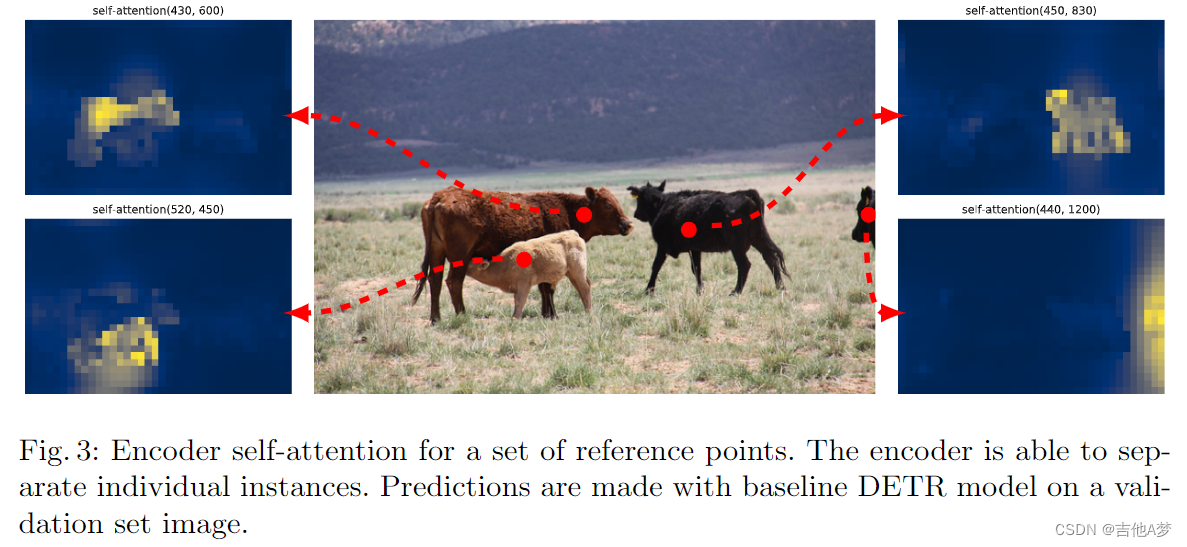
- 自注意力可视化图
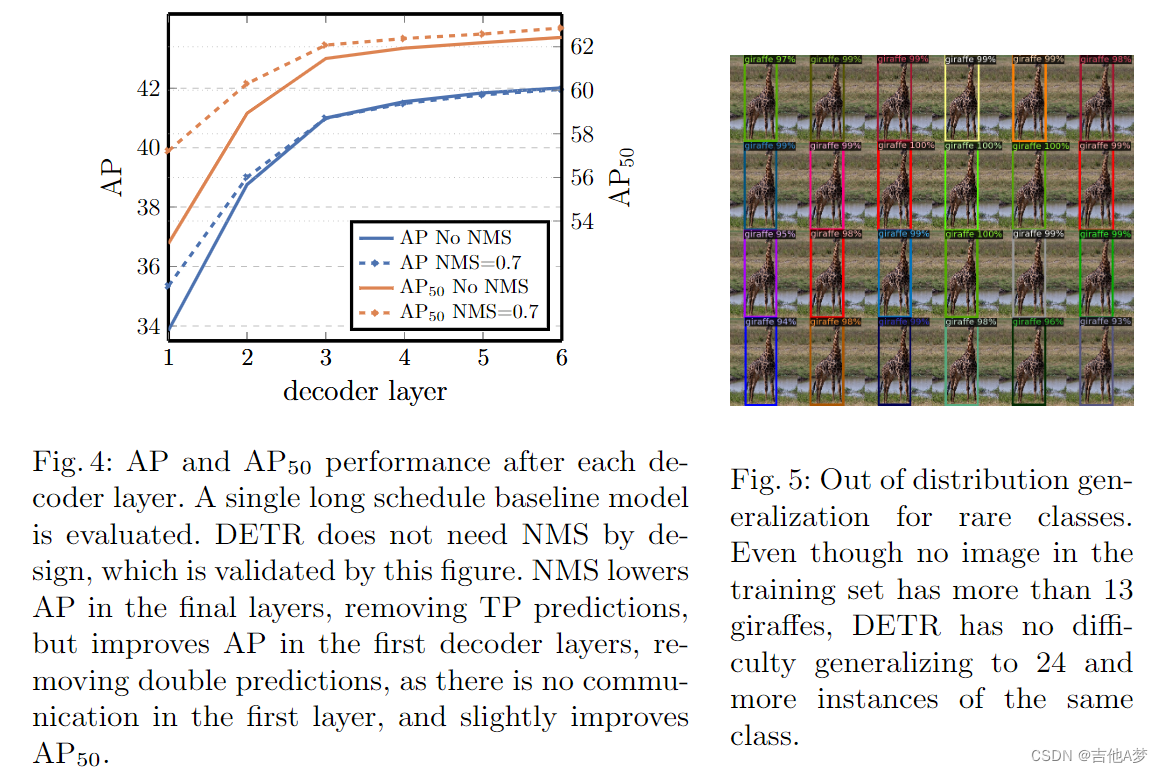
- 每个 decoder 层后的 AP & 稀有类的非分布泛化
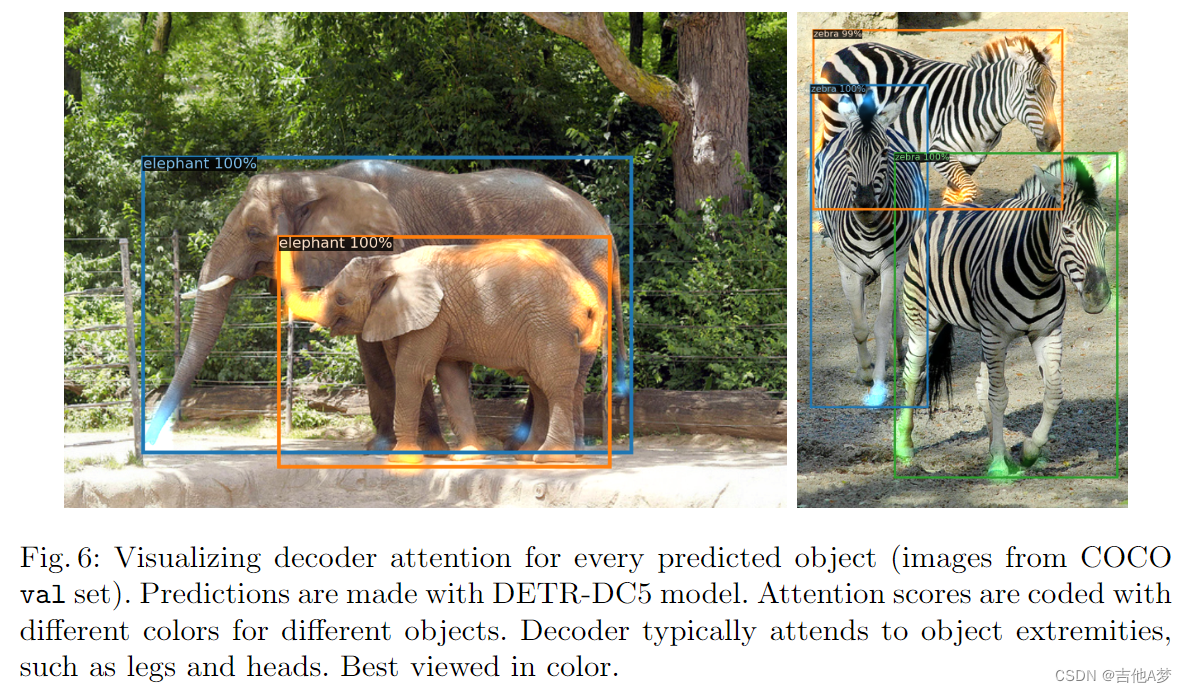
- decoder 注意力在预测对象上的可视化
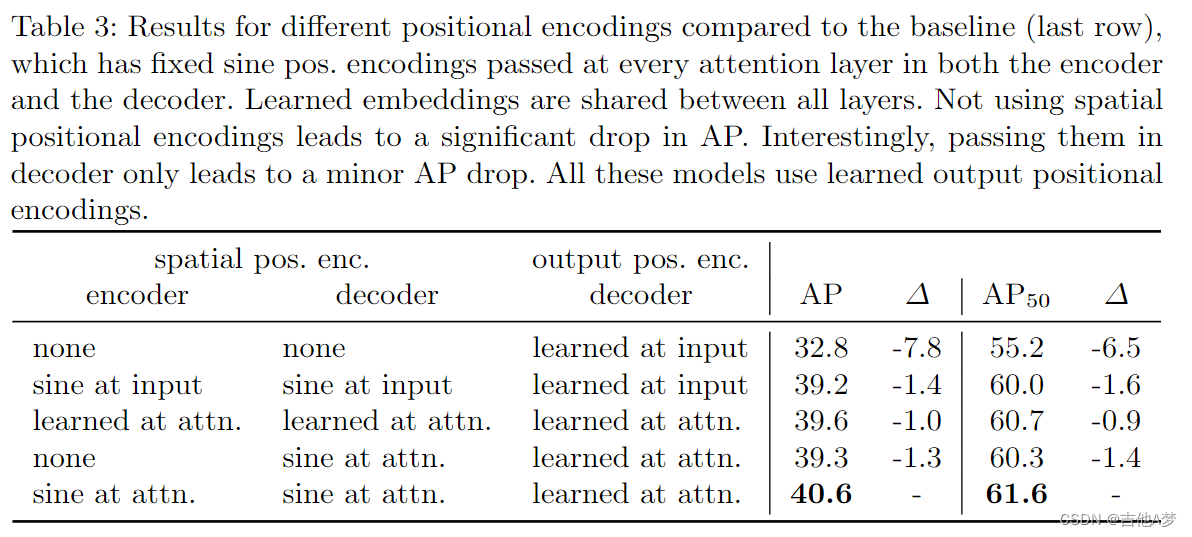
- 不同 positional encoding 的结果
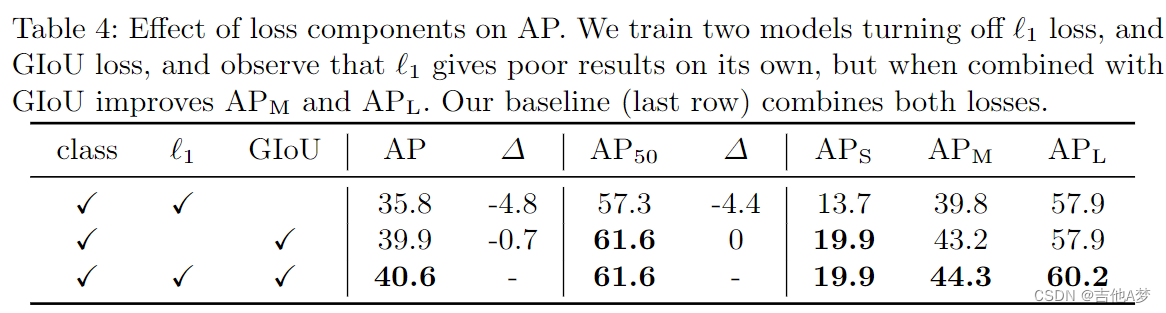
- 损失函数对 AP 的影响
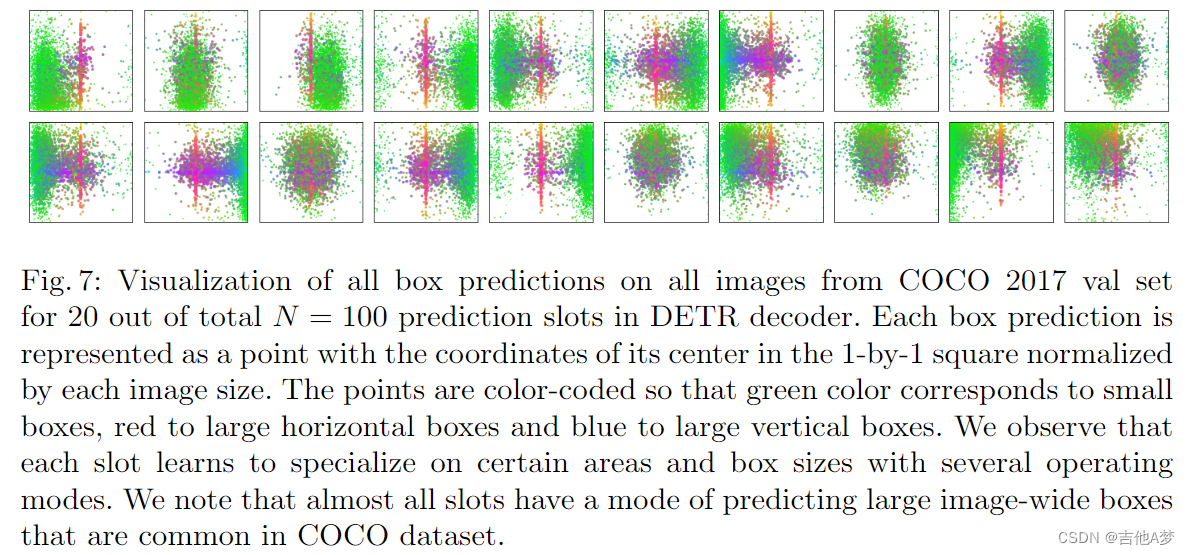
- 框预测的可视化
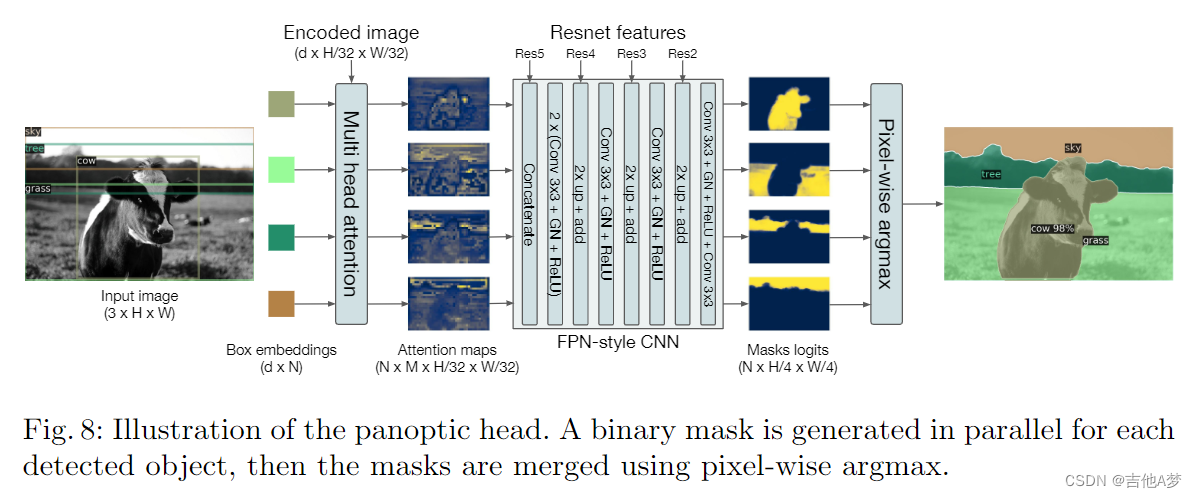
- 全景分割头
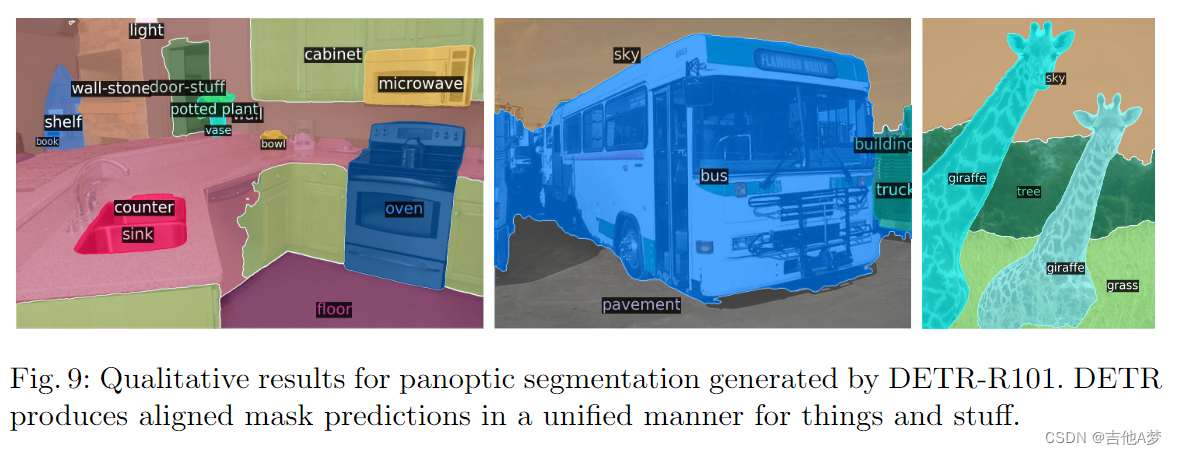
- 全景分割结果
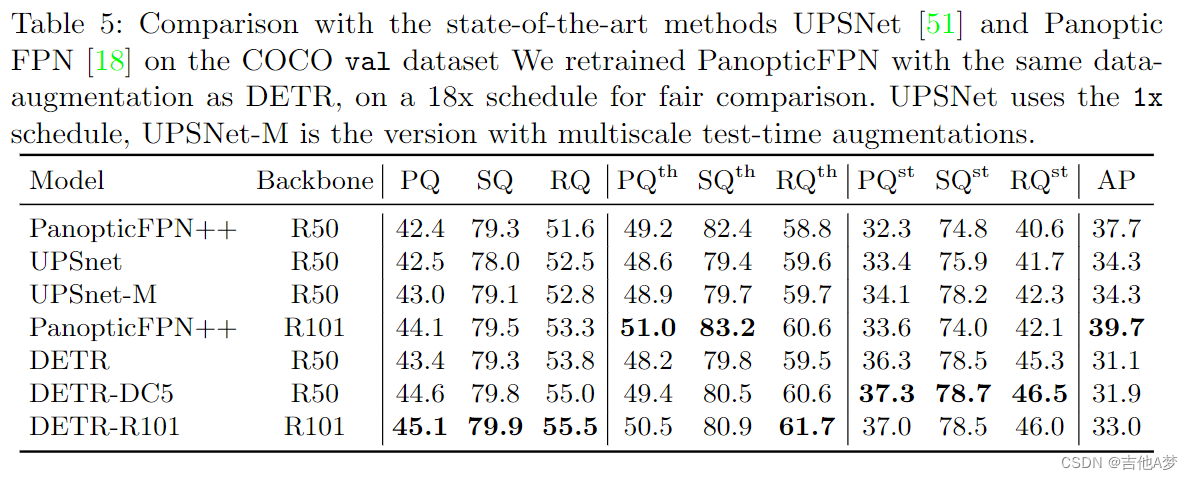
- 全景分割表现
问题
- 二分匹配是什么?
- “匹配损失函数将预测结果唯一地分配给gt,并且对对象的排列组合是不变的,因此可以并行处理”,这句话是什么意思?
本文含有隐藏内容,请 开通VIP 后查看