RNN
RNN简介
我们来看一看百度百科给的解释
下面是循环神经网络的一部分
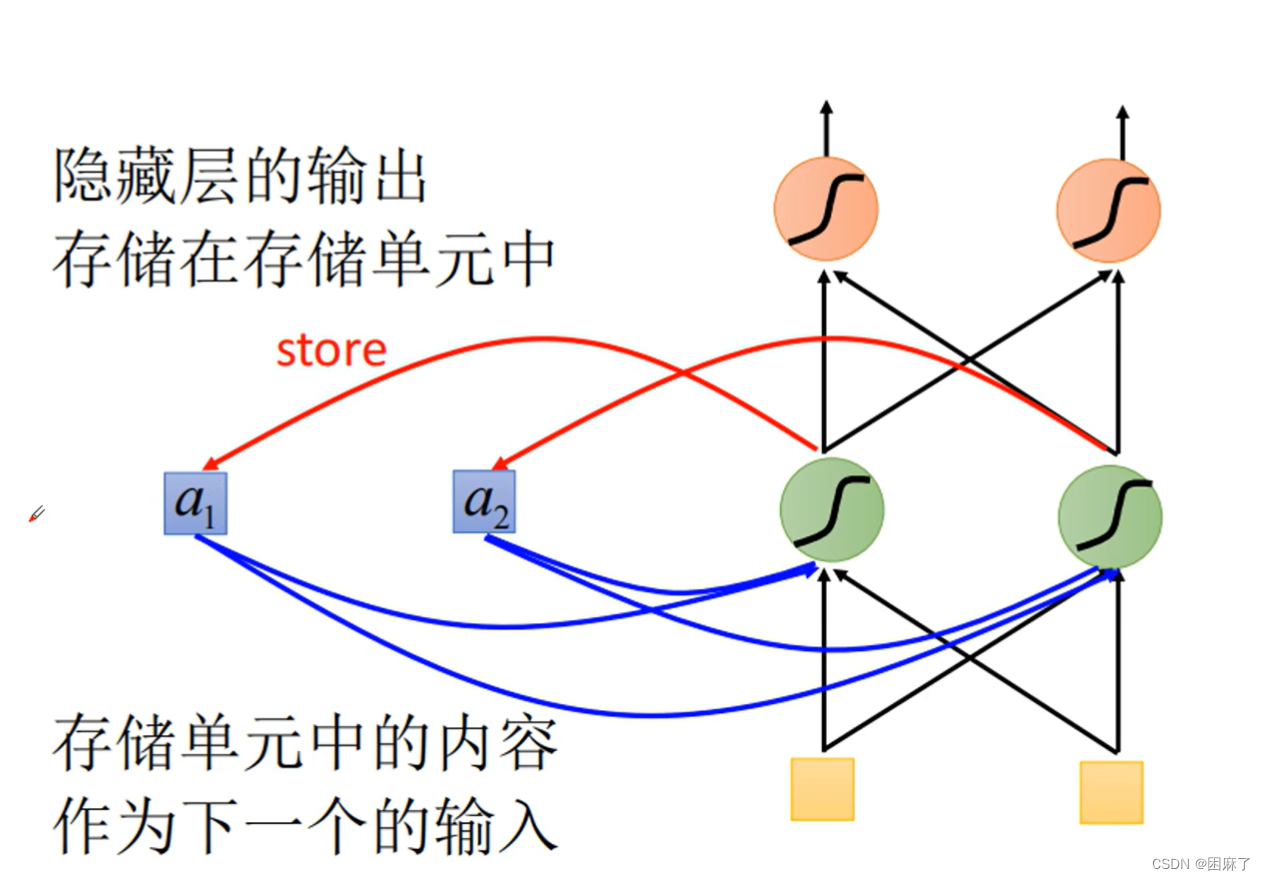
黑色直线代表权重,a1,a2代表存储单元,黄色框框代表输入,曲线是激活函数
RNN常用领域
- 语言建模(Language Modeling):RNN可以根据前文预测下一个单词或字符,用于自动文本生成、拼写纠错等任务。
- 机器翻译(Machine Translation):RNN可以将输入语言的序列转换为输出语言的序列,实现自动翻译。
- 文本分类(Text Classification):RNN可以对文本进行情感分析、垃圾邮件过滤等分类任务。
- 命名实体识别(Named Entity Recognition):RNN可以识别文本中的人名、地名、组织名等实体。
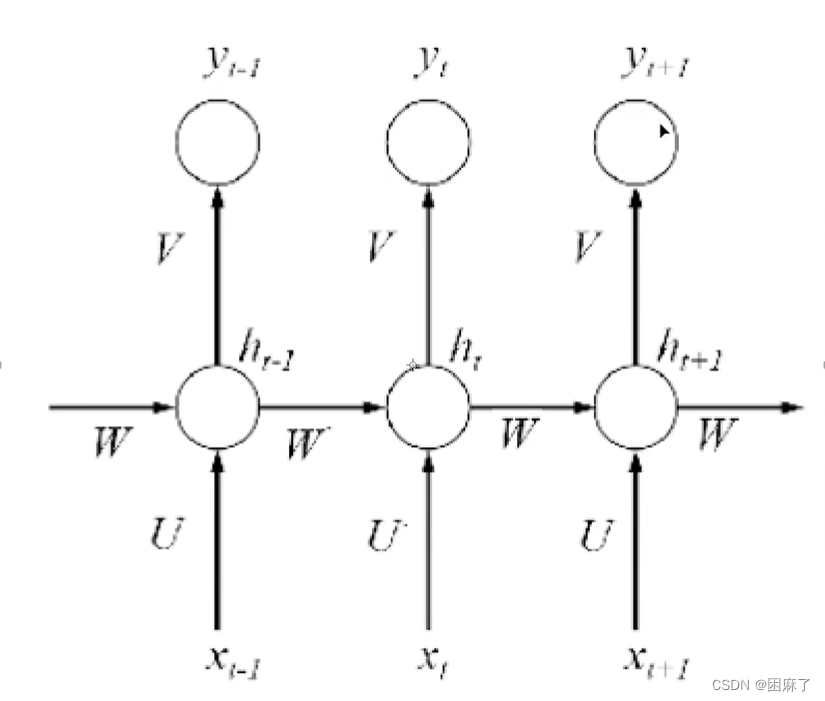
RNN结构
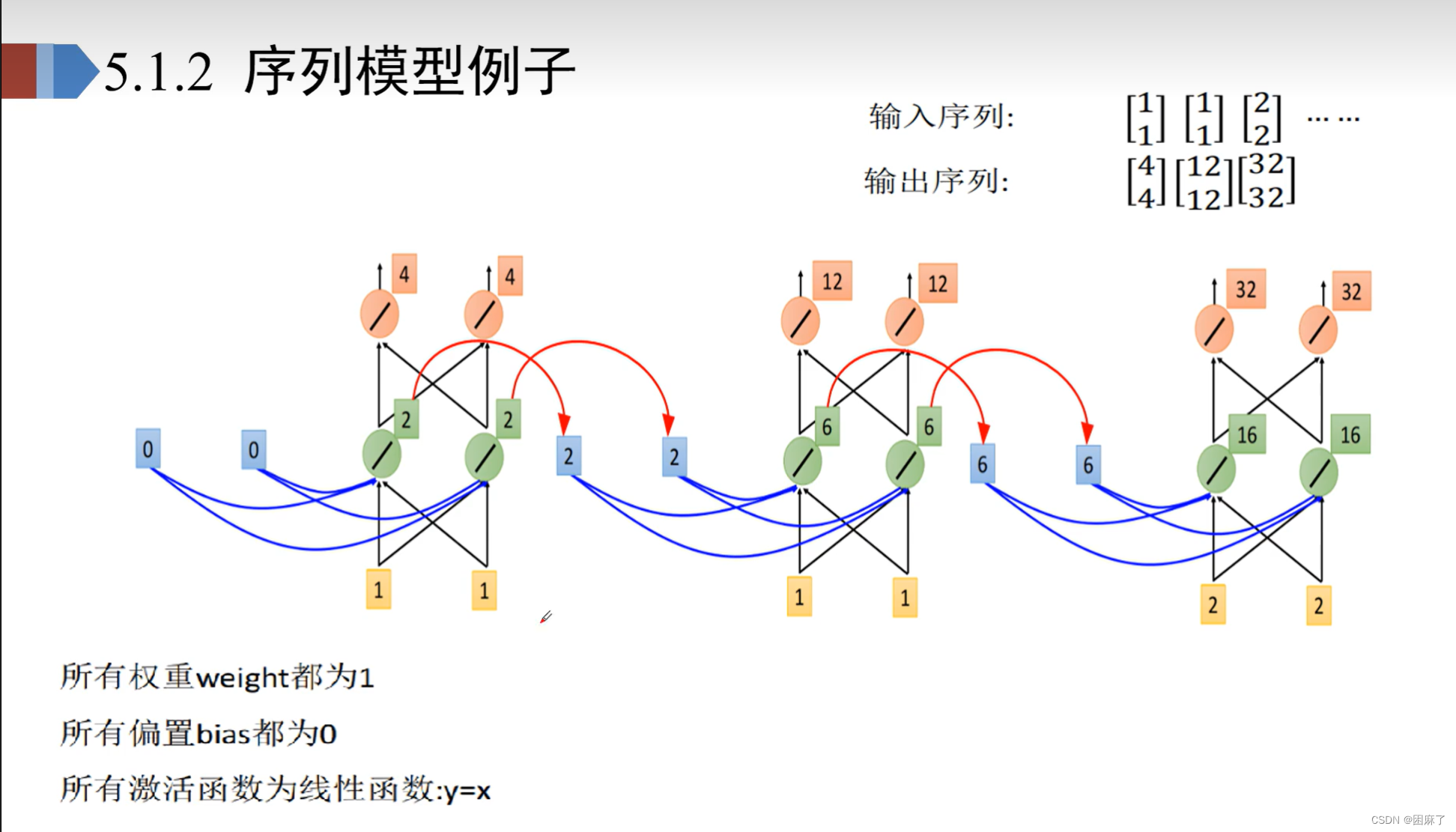
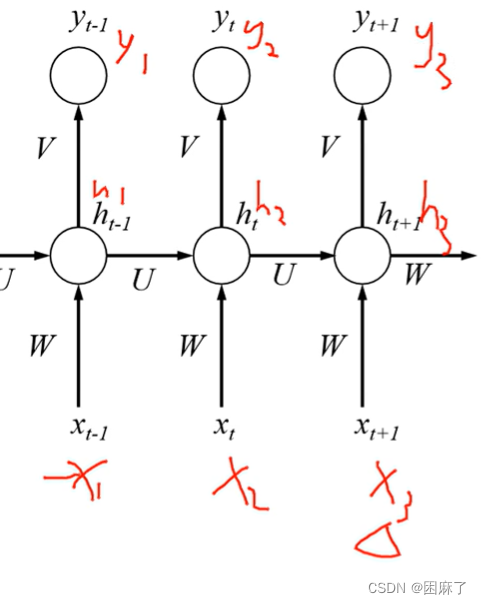
这是一个序列模型的例子。
我们可以看出, 这个是模型是由很多个相同的网络结构结成的,因此也称它为循环神经网络。
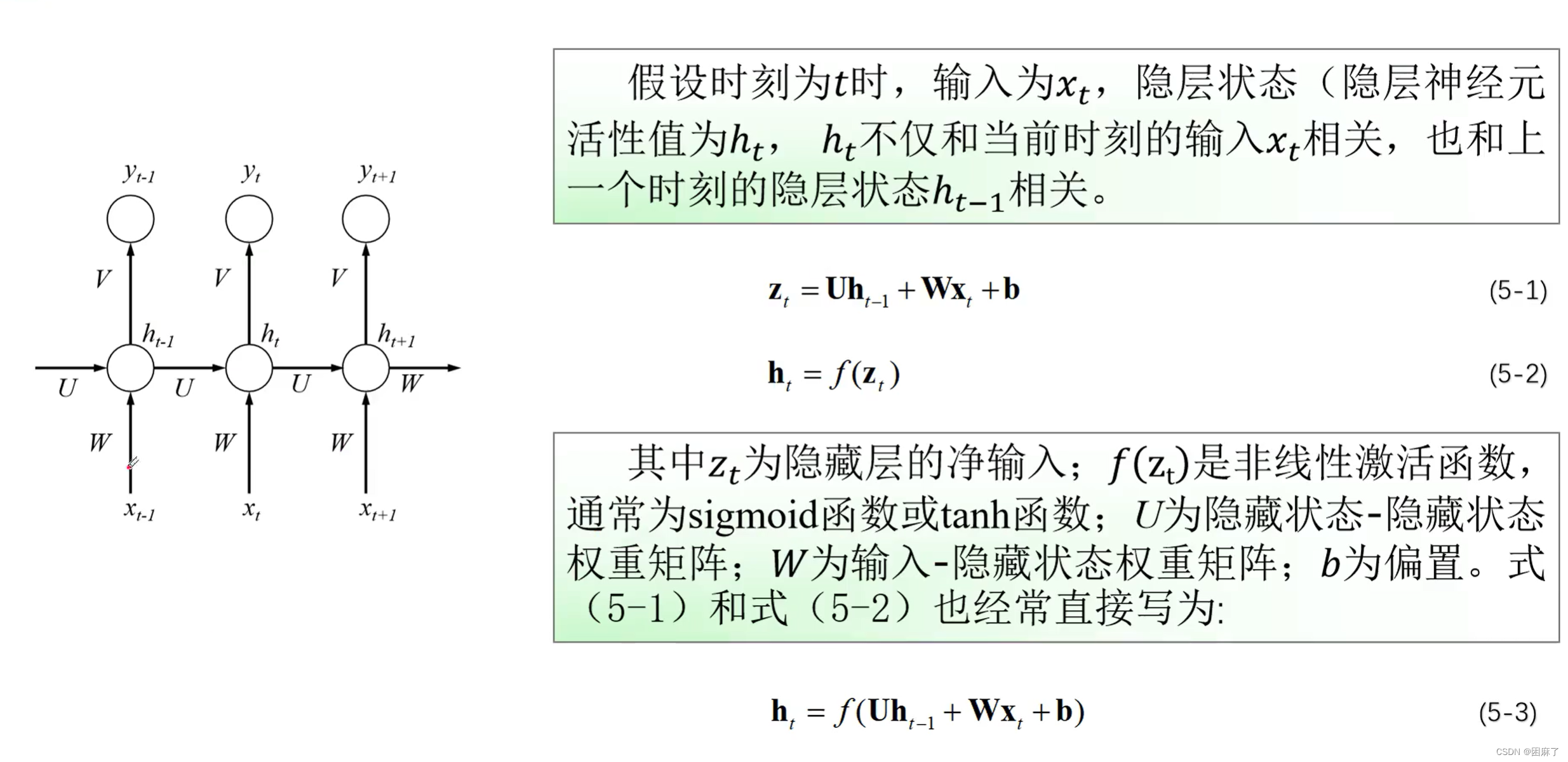
我们将这个网络的结构进行抽象,然后展开,就得到了以下内容:

RNN的工作原理
循环神经网络的工程原理其实就是它的训练算法,一种基于时间的反向传播算法BPTT.
BPTT算法是针对循环层设计的训练算法,它的工作原理和反向传播BP的工作原理是相同的,也包含同样的三个步骤:
1.前向计算每个神经元的输出值。
2.反向计算每个神经元的误差项值,它是误差函数对神经元的加权输入的偏导数。
3.计算每个权重的梯度,用随机梯度下降法更新权重。
以下是加权输入的含义:

现在,我们就对RNN有了大致的了解,下面就让我们来具体学习它的各个部分的内容。
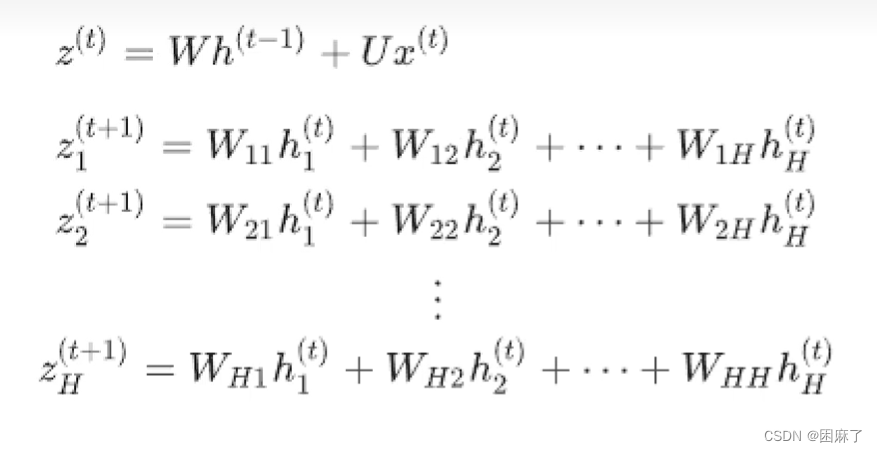
RNN的前向传播
我们主要观察中间那层,b我们设为0,可以忽略不计

中间结果z=前一层即隐藏层的值*隐藏层权重U+这一层的输入值*权重W
我们对z加上激活函数得到h,我们这在这里用到的是Tanh激活函数
这是隐藏层中间结果的表示方法。

输出层y的表示方法。
V在这里表示的也是权重。
g()是使用Softmax激活函数。
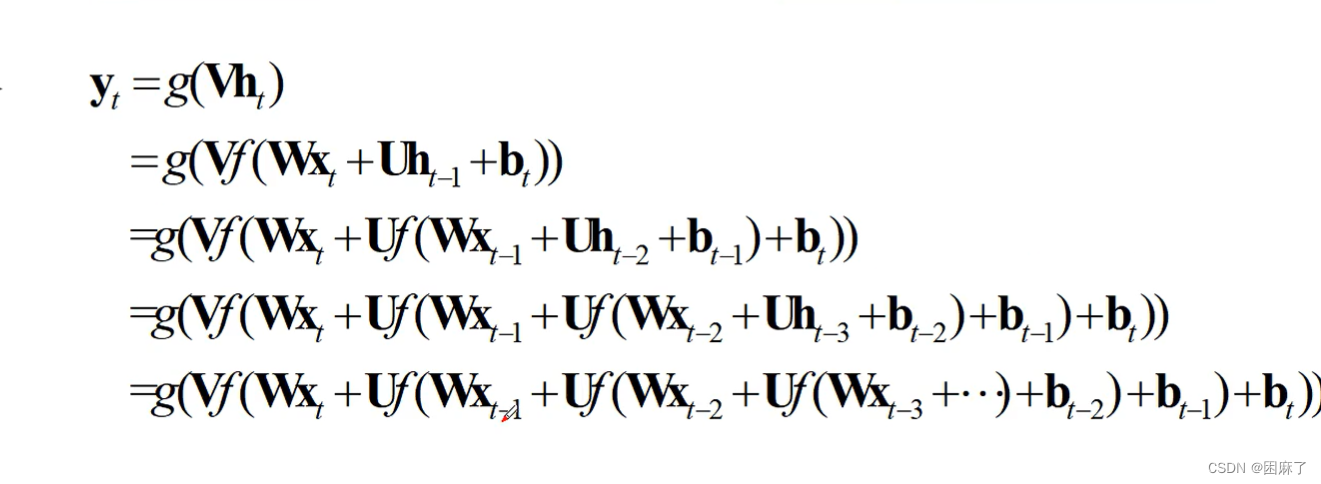
这是我们的输出值的最终函数,也就是一个嵌套的循环函数。
接下来,我们对应公式来书写代码
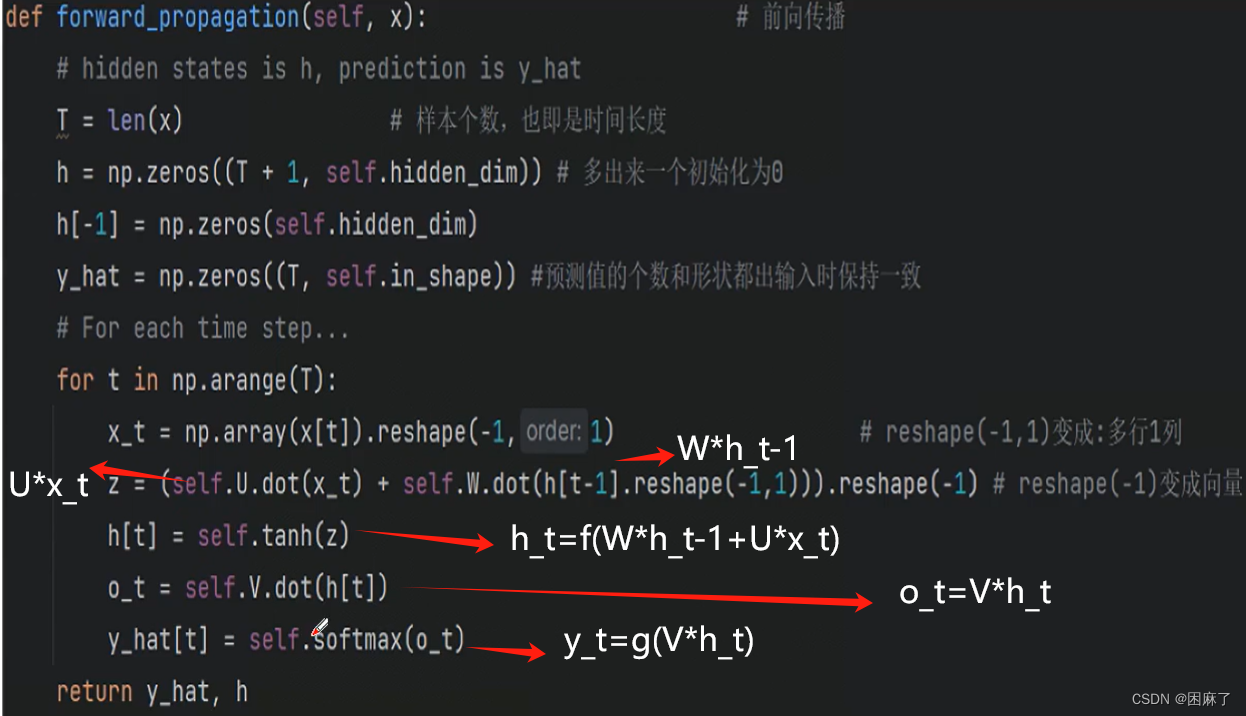
代码
import numpy as np
def forward_propagation(self,x):
T=len(x) # T为输入序列的长度
# 初始化
h=np.zeros((T+1,self.hidden_dim))
h[-1]=np.zeros(self.hidden_dim)
y_pre=np.zeros((T,self.in_shape))
for t in np.arange(T):
x_t=np.array(x[t]).reshape(-1,1)
z=(self.U.dot(x_t)+self.W.dot(h[t-1].reshape(-1,1))).reshape(-1)
h[t]=self.tanh(z)
o_t=self.V.dot(h[t])
y_pre[t]=self.softmax(o_t)
return y_pre,hRNN的后向传播
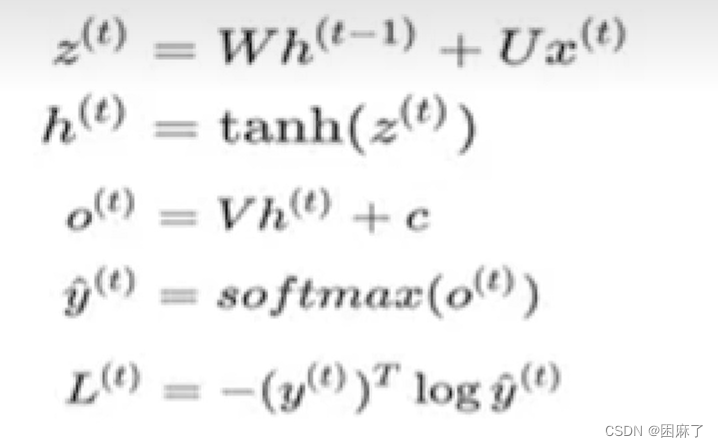
这是我们的公式。
最后的L_t是对预测值求交叉熵损失函数,是一个标量。
c为偏置,不存在的话可以不写。
我们先要了解两部分知识:
必备知识
标量对多个矩阵的链式求导法则

要注意的是,这里要进行转置。
标量对多个向量的链式求导法则

z为标量,x为向量
对权重的求导
对V求导

对W求导

我们可以对照公式进行理解。
第一部分
 这一部分如下
这一部分如下
因为
所以就有了
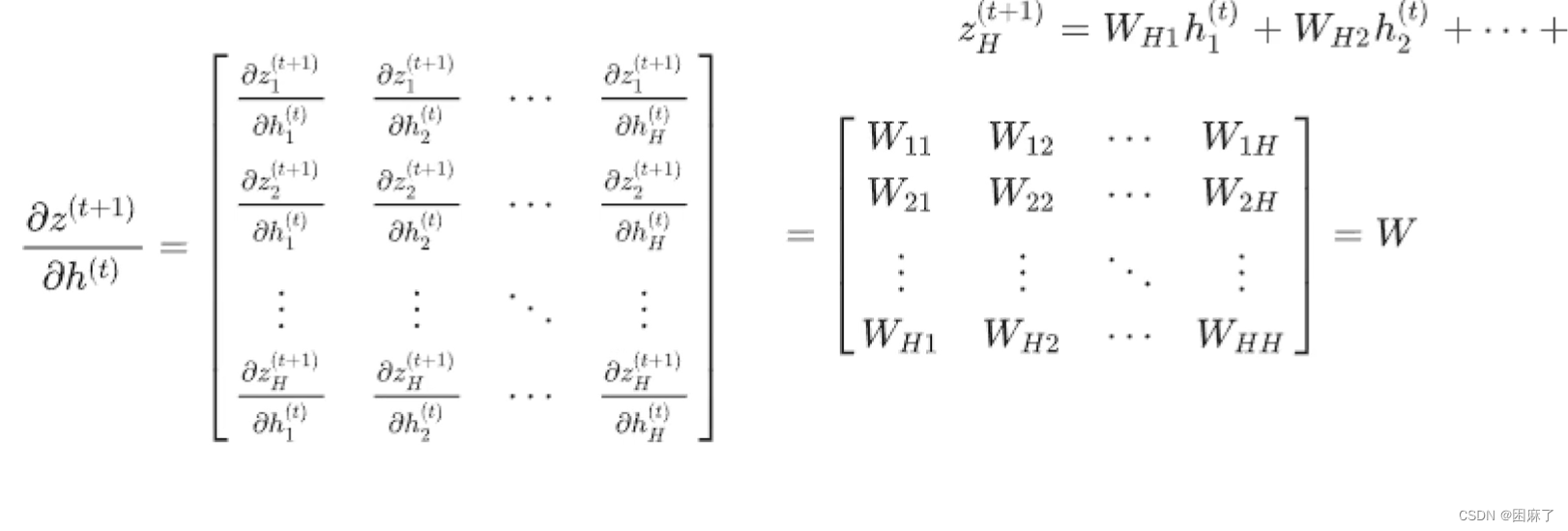
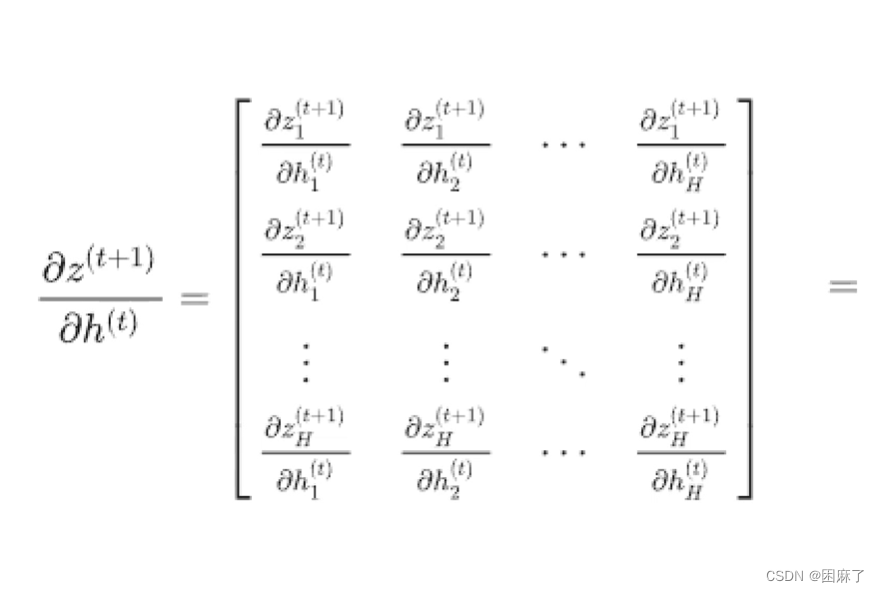
第二部分
然后是下一个部分
 它是怎么求的呢?
它是怎么求的呢?
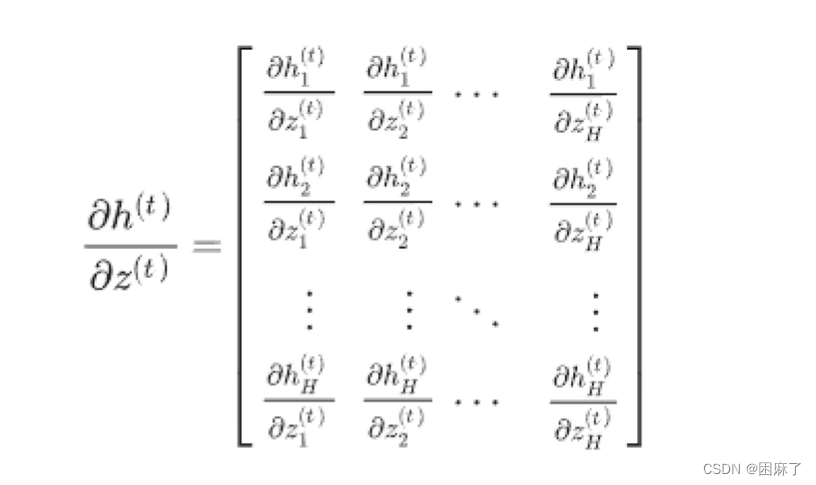
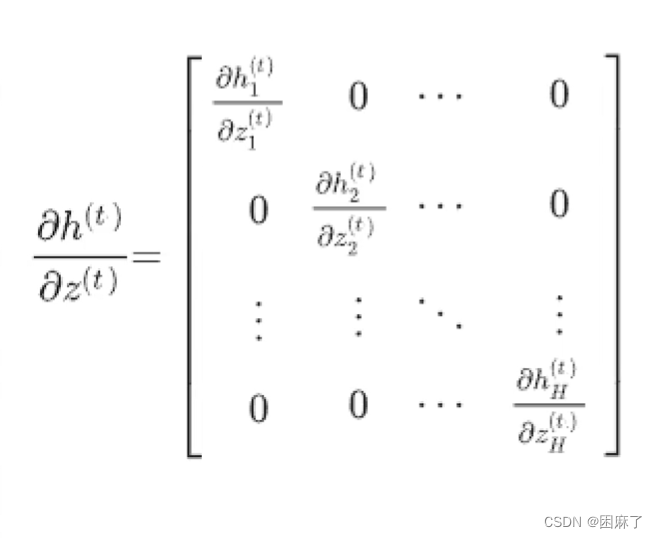
因为h1只和z1有关,h2只和z2有关,所以上面变为了对角矩阵:
第三部分
 这一部分:
这一部分:
我们先要知道tanh的求导公式:
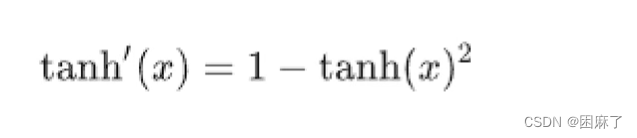
然后我们就得到了以下结果
 对U求导
对U求导
与对W求导是一样的

RNN的梯度更新
通过后向传播,我们可以得到以下公式:

既然我们得到了公式,我们就可以写出相对应的代码了:
这里是用纯python写的
import torch
import numpy as np
class RNN(torch.nn.Module):
def __init__(self,input_size,output_size,hidden_dim,n_layers):
super(RNN,self).__init__()
self.hidden_dim = hidden_dim
self.n_layers = n_layers
self.rnn = torch.nn.RNN(input_size,hidden_dim,n_layers,batch_first=True)
self.linear=torch.nn.Linear(hidden_dim,output_size)
def forward(self,x):
batch_size = x.size(0)
hidden= torch.zeros(self.n_layers,batch_size,self.hidden_dim)
out,hidden=self.rnn(x,hidden)
out = self.linear(out)
return out,hidden我们在这里简单了解一下就好了,。
RNN的pythorch框架代码实现
在这里,我们需要先了解一些函数
torch.nn.RNN
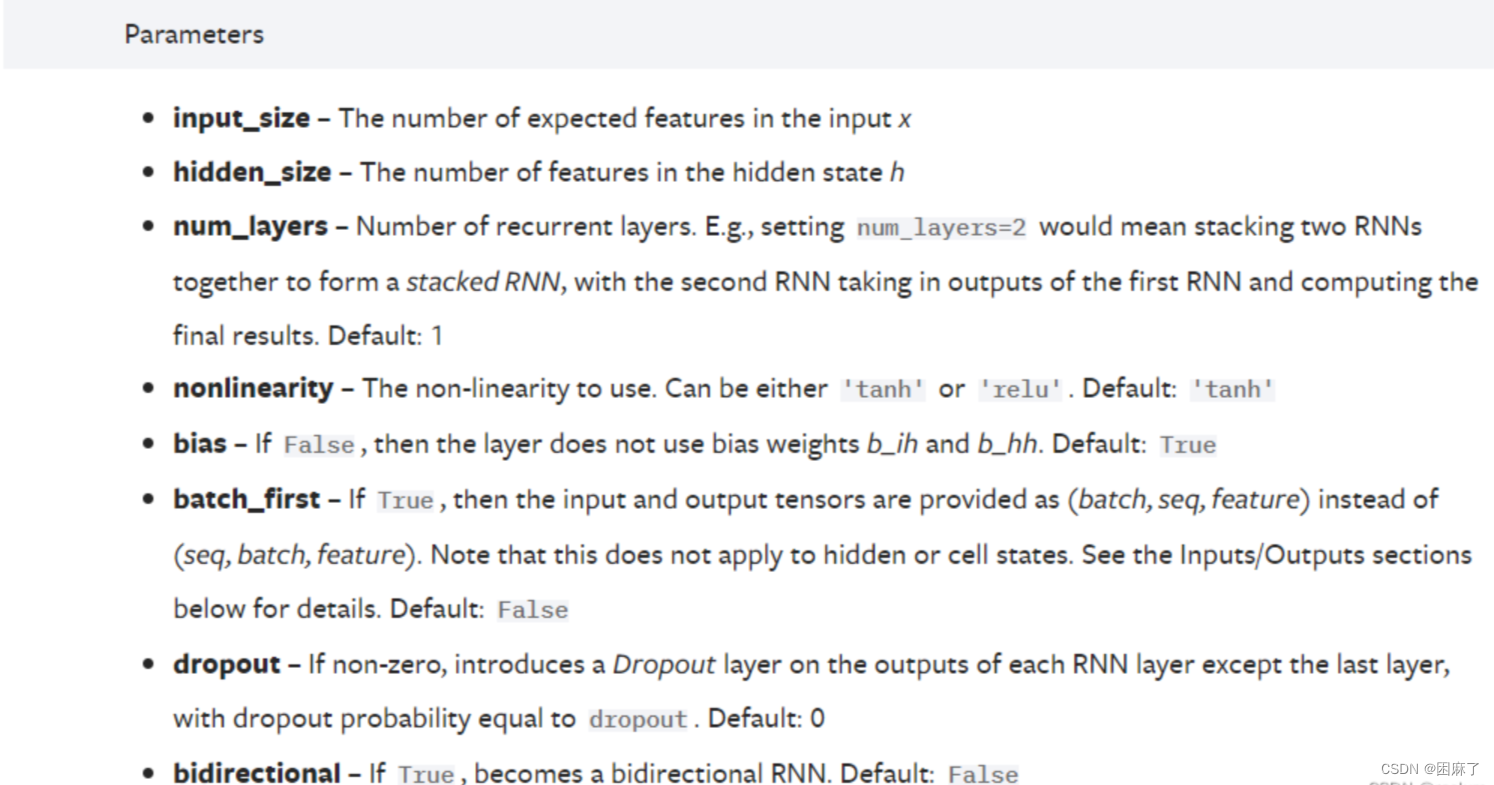
参数说明
input_size:即 d ;
hidden_size:即 h ;
num_layers:即RNN的层数。默认是 1 层。该参数大于 1 时,会形成 Stacked RNN,又称多层RNN或深度RNN;
nonlinearity:即非线性激活函数。可以选择 tanh 或 relu,默认是 tanh;
bias:即偏置。默认启用,可以选择关闭;
batch_first:即是否选择让 batch_size 作为输入的形状中的第一个参数。当 batch_first=True 时,输入应具有 N × L × d这样的形状,否则应具有 L × N × d 这样的形状。默认是 False;
dropout:即是否启用 dropout。如要启用,则应设置 dropout 的概率,此时除最后一层外,RNN的每一层后面都会加上一个dropout层。默认是 0 ,即不启用;
bidirectional:即是否启用双向RNN,默认关闭。
torch.nn.Linear
torch.nn.Linear(in_features, # 输入的神经元个数
out_features, # 输出神经元个数
bias=True # 是否包含偏置
)
实际上,他进行的是y_pre=w*x+b的线性变换,从而得到预测值y_pre。
torch.zeros
torch.zeros(
*sizes, out=None, dtype=None, layout=torch.strided, device=None, requires_grad=False
)
参数说明
*sizes:一个或多个整数,用于指定张量的形状(shape)。可以传递多个参数来创建一个多维张量。
out:可选参数,用于指定输出张量的位置。
dtype:可选参数,用于指定输出张量的数据类型。默认为 None,表示使用默认数据类型。
layout:可选参数,用于指定张量的布局。默认为 torch.strided。
device:可选参数,用于指定张量的设备(CPU 或 GPU)。
requires_grad:可选参数,指示是否为张量启用梯度计算。默认为 False。
代码
在这里,我们仍需对照图像进行理解
import torch
import numpy as np
class RNN(torch.nn.Module):
def __init__(self,input_size,output_size,hidden_dim,n_layers):
super(RNN,self).__init__()
self.hidden_dim = hidden_dim
self.n_layers = n_layers
self.rnn = torch.nn.RNN(input_size,hidden_dim,n_layers,batch_first=True)
self.linear=torch.nn.Linear(hidden_dim,output_size)
def forward(self,x):
batch_size = x.size(0)
hidden= torch.zeros(self.n_layers,batch_size,self.hidden_dim)
out,hidden=self.rnn(x,hidden)
out = self.linear(out)
return out,hidden在前向传播中,
batch_size=x.size(0) 这行代码获取输入张量x的第一个维度的大小;
在这里,hidden是形状为(
self.n_layers,batch_size,self.hidden_dim
)的全零张量
RNN的缺点:梯度爆炸和梯度消失
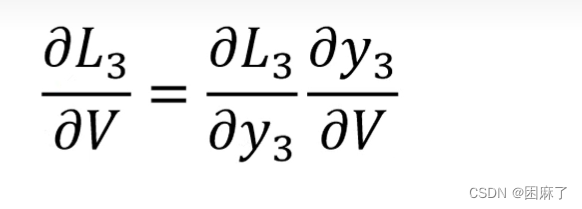
L3是第三个时间点的交叉熵损失函数
在这里我们是L3对V求偏导,通过图像我们可以得到上面的结果,然后再通过结果可以看出,对V求偏导并没有长期依赖。
我们再来看下面的对U和W求偏导
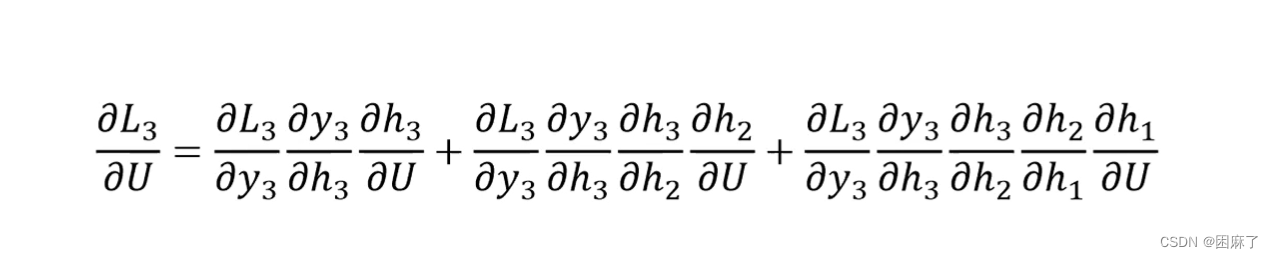

推导过程上面已经提到了,这里就不多说了。
我们可以看出,对U和W求偏导的式子都特别长,对它们求偏导会随着时间序列产生长期依赖
我们可以把上面的式子写成下面的形式:

然后再加上激活函数
 最终得到
最终得到

下面是f(x)=tanh部分的图像
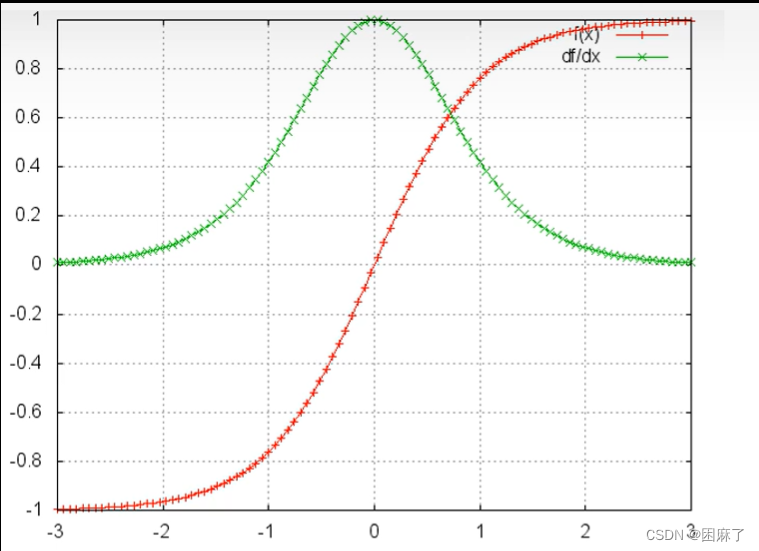
通过上面这张图片,我们可以得到 f(x)的导数的值域是在0到1之间的。
训练过程中,大部分情况tanh的导数都是小于1的,那么如果U也是一个大于0小于1的值,当t很大即时间序列很大时,梯度值就会趋近于0,造成梯度消失 ;
同理,当U很大时,梯度时就会趋近于无穷,造成梯度爆炸。
那么RNN怎么解决梯度爆炸和梯度消失呢,就是用到了LSTM
LSTM
前向传播

这里的![]() 指的是进行了Sigmoid激活函数
指的是进行了Sigmoid激活函数
我们可以把图和公式对应起来,进行理解

反向传播

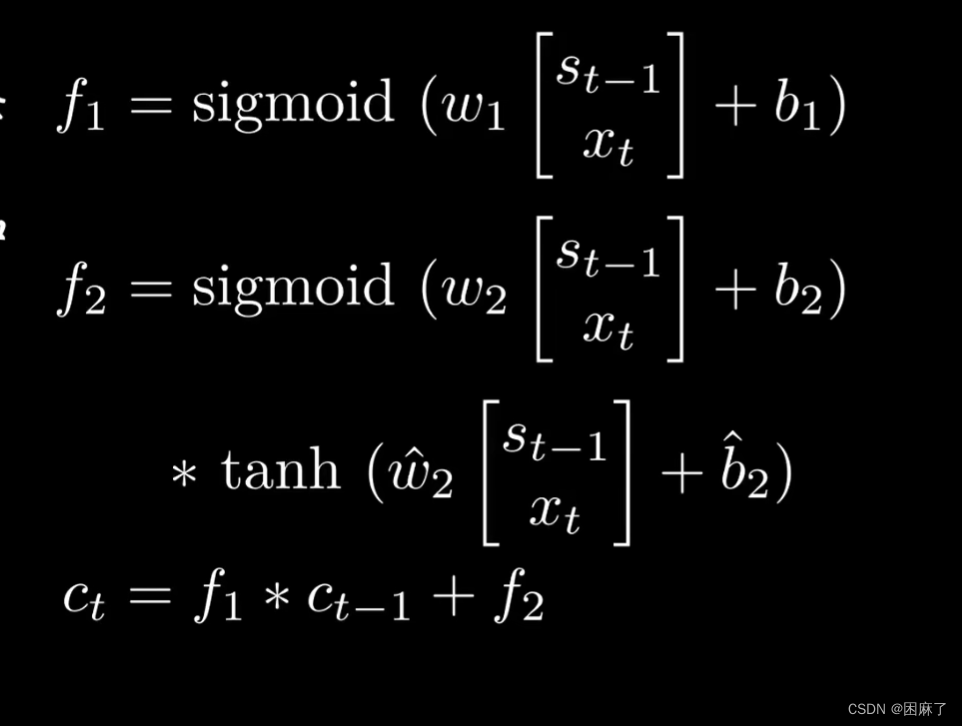 在这里,f1是指遗忘门的内容,f2是指输入门,ct表示新的记录,而ct-1就表示上一条记录。
在这里,f1是指遗忘门的内容,f2是指输入门,ct表示新的记录,而ct-1就表示上一条记录。
f1,遗忘门,我们这里可以理解为橡皮,对f1进行sigmoid,相当于把不重要的信息删除掉,保留重要的信息。
f2,输入门,我们可以理解为铅笔,同样进行sigmoid后,再*tanh,相当于对所有信息进行一个梳理
pytorch代码
import torch
import numpy as np
class LSTM(torch.nn.Module):
def __init__(self, input_size, hidden_dim, output_size,n_layers):
super(LSTM, self).__init__()
self.input_size = input_size
self.hidden_size = hidden_dim
self.output_size = output_size
self.n_layers = n_layers
self.lstm = torch.nn.LSTM(input_size, hidden_dim, n_layers, batch_first=True)
self.fc = torch.nn.Linear(hidden_dim, output_size)
def forward(self,x):
h0=torch.zeros(self.x.size(0), self.n_layers,self.hidden_size).to(x.device)
c0 = torch.zeros(self.x.size(0), self.n_layers, self.hidden_size).to(x.device)
out,hidden=self.lstm(x,(h0,c0))
out = self.fc(out[:,-1,:])
return out,hidden在LSTM模型中,最核心的部分也就是前向传播的部分了。
核心代码解析
h0=torch.zeros(self.x.size(0), self.n_layers,self.hidden_size).to(x.device) c0 = torch.zeros(self.x.size(0), self.n_layers, self.hidden_size).to(x.device)
需要注意的是,在上面的__init__中,由于我们将batch_first设为Ture,输入和输出的张量的形状就是(batch, seq_len, input_size),
其中batch是批处理大小,seq_len是序列长度,我们在这里用的是n_layers,input_size是特征维度。
如果batch_first=False(默认值),则输入张量的形状为(seq_len, batch, input_size)。
所以,在zeros中,传入的参数依次为 self.x.size(1), self.n_layers,self.hidden_size
由于 batch_first=True,batch 的大小就是张量的第一个维度 ,也就是 x.size(0)
最后面的 to(x.device)用来确保这些张量位于与输入张量x相同的设备上(例如,CPU或GPU)
out = self.fc(out[:,-1,:])
在这里我们用到了一个截取的操作
我们可以通过这个文章来复习一下。
这是指在最后的结果中,我们截取每个样本(第一个维度)中的最后一个时间步(-1)的所有特征(第三个维度)。