Reinforcement Learning
an agent performs actions in environment, and receives rewards
goal: Learn how to take actions that maximize reward
Stochasticity: Rewards and state transitions may be random
Credit assignment: Reward r t r_t rt may not directly depend on action a t a_t at
Nondifferentiable: Can’t backprop through the world
Nonstationary: What the agent experiences depends on how it acts
Markov Decision Process (MDP)
Mathematical formalization of the RL problem: A tuple ( S , A , R , P , γ ) (S,A,R,P,\gamma) (S,A,R,P,γ)
S S S: Set of possible states
A A A: Set of possible actions
R R R: Distribution of reward given (state, action) pair
P P P: Transition probability: distribution over next state given (state, action)
γ \gamma γ: Discount factor (trade-off between future and present rewards)
Markov Property: The current state completely characterizes the state of the world. Rewards and next states depend only on current state, not history.
Agent executes a policy π \pi π giving distribution of actions conditioned on states.
Goal: Find best policy that maximizes cumulative discounted reward ∑ t γ t r t \sum_t \gamma^tr_t ∑tγtrt
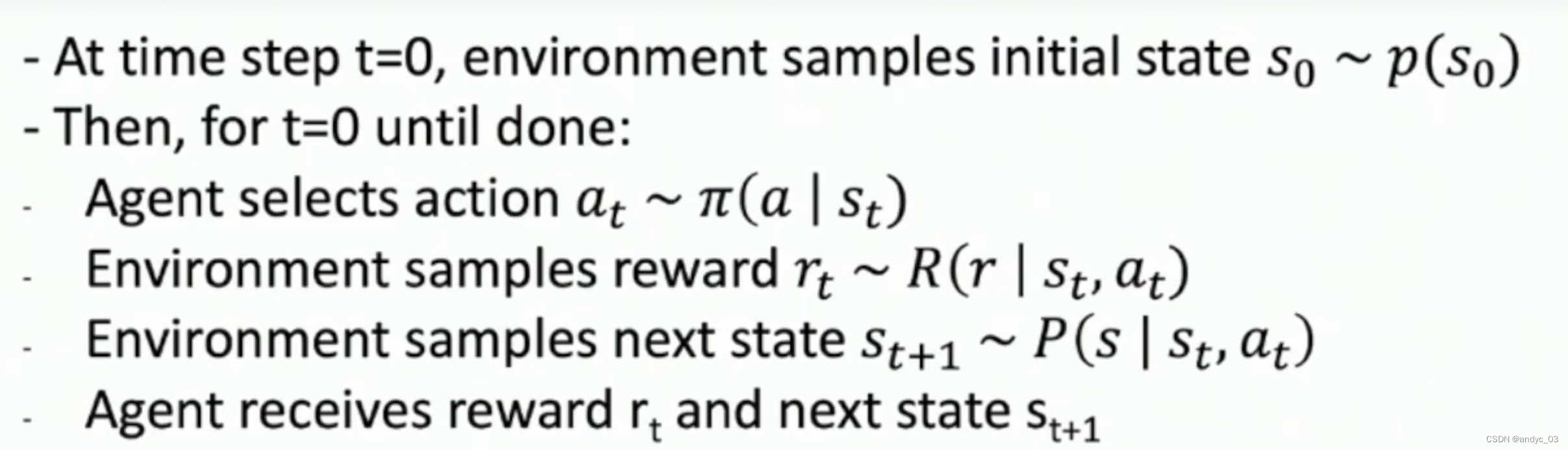
We will try to find the maximal expected sum of rewards to reduce the randomness.
Value function V π ( s ) V^{\pi}(s) Vπ(s): expected cumulative reward from following policy π \pi π from state s s s
Q function Q π ( s , a ) Q^{ \pi}(s,a) Qπ(s,a) : expected cumulative reward from following policy π \pi π from taking action a a a in state s s s
Bellman Equation
After taking action a in state s, we get reward r and move to a new state s’. After that, the max possible reward we can get is max a ′ Q ∗ ( s ′ , a ′ ) \max_{a'} Q^*(s',a') maxa′Q∗(s′,a′)
Idea: find a function that satisfy Bellman equation then it must be optimal
start with a random Q, and use Bellman equation as an update rule.

But if the state is large/infinite, we can’t iterate them.
Approximate Q(s, a) with a neural network, use Bellman equation as loss function.
-> Deep q learning
Policy Gradients
Train a network π θ ( a , s ) \pi_{\theta}(a,s) πθ(a,s) that takes state as input, gives distribution over which action to take
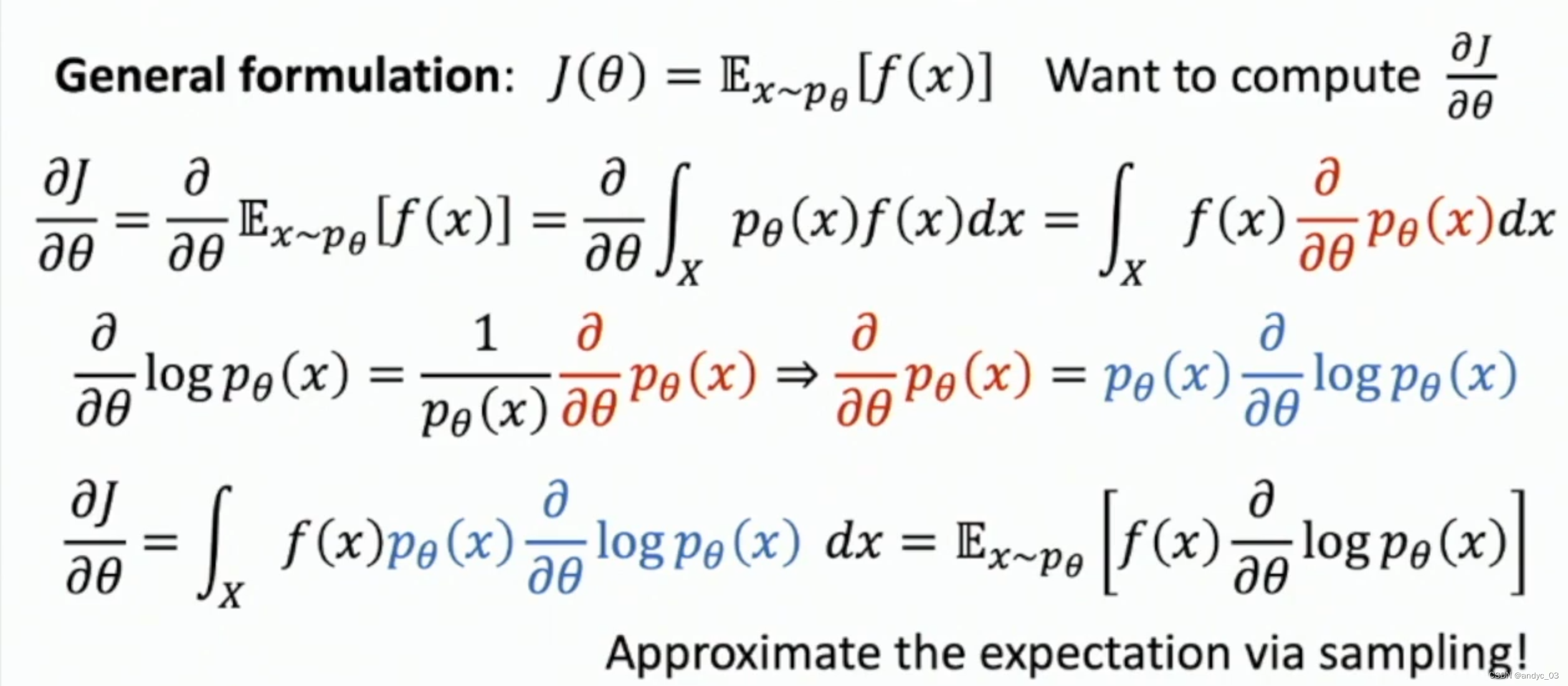
Objective function: Expected future rewards when following policy π θ \pi_{\theta} πθ
Use gradient ascent -> play some tricks to make it differentiable
Other approaches:
Actor-Critic
Model-Based
Imitation Learning
Inverse Reinforcement Learning
Adversarial Learning
…
Stochastic computation graphs