目录
一、计算机中的视觉:
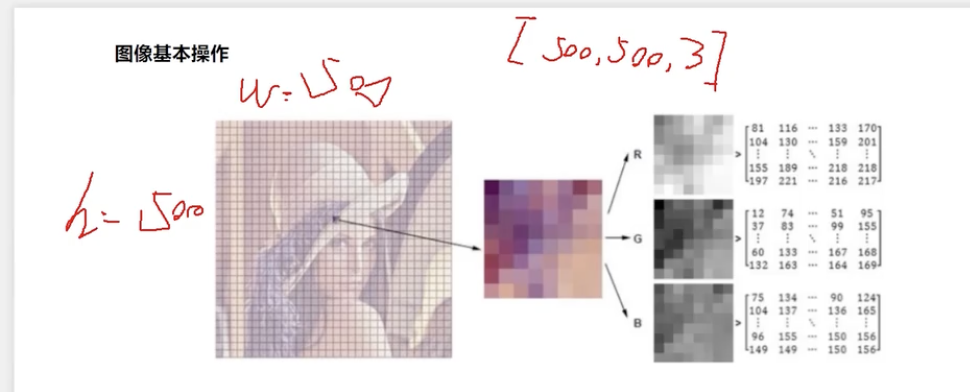
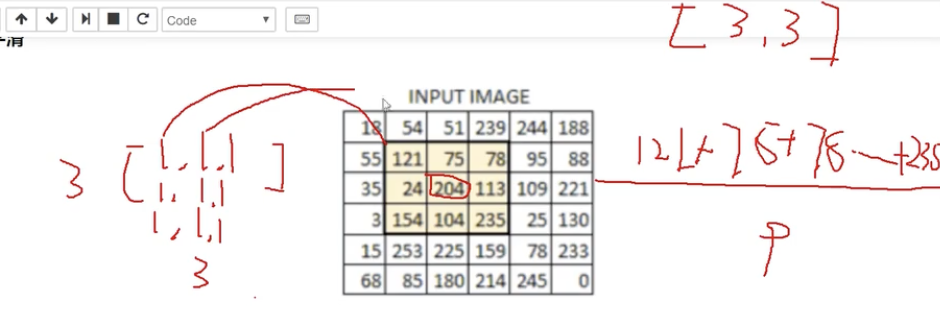
- 图像由像素点组成,像素点由数字矩阵组成(不同亮度:0-255)
- R、G、B三个通道---彩色图
- 图像维度:[H,W,3]
二、Opencv基本操作:
图片基础处理:
图片读取cv2.imread('xx.jpg')
图片窗口cv2.imshow()
获取图片属性img.shape()
以灰度形式读取图片img=cv2.imread('.jpg',cv2.IMREAD_GRAYSCALE)
import cv2 #opencv默认读取BGR
import matplotlib.pyplot as plt
import numpy as np
%matplotlib inline
#图片读取基本步骤
img=cv2.imread('cat.jpg')
img
cv2.imshow('image',img) #窗口名称+图像
cv2.waitKey(0) #0任意键终止,1000就是1000毫秒的意思,一般用0
cv2.destroyAllWindows()
#获取图片属性
img.shape #H,W,C;C=3==RGB
#以灰度图形式读取
img=cv2.imread('cat.jpg',cv2.IMREAD_GRAYSCALE)
img
img.shape
cv_show('image',img)
#保存
cv2.imwrite('mycat.png',img)
或者可以把窗口写成一个函数
def cv_show(name,img):
#define a fuction
def cv_show(name,img):
cv2.imgshow(name,img)
cv2.waitKey(0)
cv2.destroyAllWindows()视频基本处理:
首先读取视频路径,查看路径是否能够正确读取,显示窗口
#视频读取
#指定路径
vc=cv2.VideoCapture('test.mp4')
#检查是否打开正确
if vc.isOpened():
open,frame = vc.read()#按顺序一帧一帧读取 open=True/false,第二个参数是当前帧的图像
else:
open=False
while open:
ret,frame = vc.read()
if frame is not None:
break
if ret ==True:
gray=cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)#转换成灰度图
cv2.imshow('result',gray)
if cv2.waitKey(100) & 0xFF ==27:
break
vc.release()
cv2.destroyAllWindows()
图像截取(截取,合并,只保留一个元素)
注意opencv顺序是BGR
#截取部分图像
img=cv2.imread('cat.img')
cat=img[0:200,0:200]#ROI截取
cv_show('cat',cat)
#颜色通道提取BGR
b,g,r=cv2.split(img)
b
b.shape
g
g.shape#bgr大小相同
#合并
img=cv2.merge((b,g,r))
img.shape
#只保留R
cur_img=img.copy()
cur_img[:,:,0] = 0
cur_img[:,:,1] = 0
cv_show['R',cur_img]
#只保留G
cur_img=img.copy()
cur_img[:,:,0] = 0
cur_img[:,:,2] = 0
cv_show['G',cur_img]
#只保留B
cur_img=img.copy()
cur_img[:,:,1] = 0
cur_img[:,:,2] = 0
cv_show['B',cur_img]图像填充
六种填充方法:
#边界填充
#上下左右分别填充大小
top_size,bottom_size,left_size,right_size = (50,50,50,50)
#复制法,复制最边缘像素
replicate = cv2.copyMakeBorder(img,top_size,bottom_size,left_size,right_size,borderType=cv2.BORDER_REPLICATE)
#反射法,对感兴趣的图像中的像素在两边进行复制abc cba
reflect = cv2.copyMakeBorder(img,top_size,bottom_size,left_size,right_size,borderType=cv2.BORDER_REFLECT)
#反射法,以最边缘像素为轴,对称 gfedcb|abcdefg|hgfedcba
reflect101 = cv2.copyMakeBorder(img,top_size,bottom_size,left_size,right_size,borderType=cv2.BORDER_REFLECT_101)
#外包装法,cedfgh|abcdefgh|abcdefg
wrap = cv2.copyMakeBorder(img,top_size,bottom_size,left_size,right_size,borderType=cv2.BORDER_WRAP)
#常量法,常数数值填充,0是黑框
constant = cv2.copyMakeBorder(img,top_size,bottom_size,left_size,right_size,cv2.BORDER_CONStant,value=0)
import matplotlib.pyplot as plt
plt.subplot(231),plt.imshow(img,'gray'),plt.title('ORIGINAL')
plt.subplot(232),plt.imshow(replicate,'gray'),plt.title('replicate')
plt.subplot(233),plt.imshow(reflect,'gray'),plt.title('reflect')
plt.subplot(234),plt.imshow(reflect101,'gray'),plt.title('reflect101')
plt.subplot(235),plt.imshow(wrap,'gray'),plt.title('wrap')
plt.subplot(236),plt.imshow(constant,'gray'),plt.title('constant')
plt.show()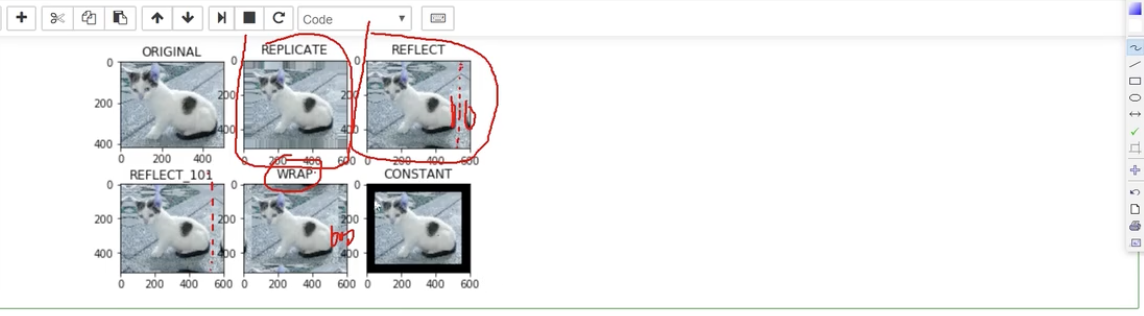
数值计算
cv2.add(img1,img2)超过255,直接等于255
图像融合
必须两个图片size大小相同才可以融合
R = a*x1+b*x2+c 权重和偏置项
#想实现img_cat+img_dog
img_cat.shape
#resize变成猫图片的大小
img_dog=cv2.resize(img_dog,(500,414)
res=cv2.addWeighted(img_cat,0.4,img_dog,0.6,0)
plt.show(res)cv2.resize()还可以用作图片伸缩
#当不知道图片伸缩多少时,可以把x变成原来的1.5倍
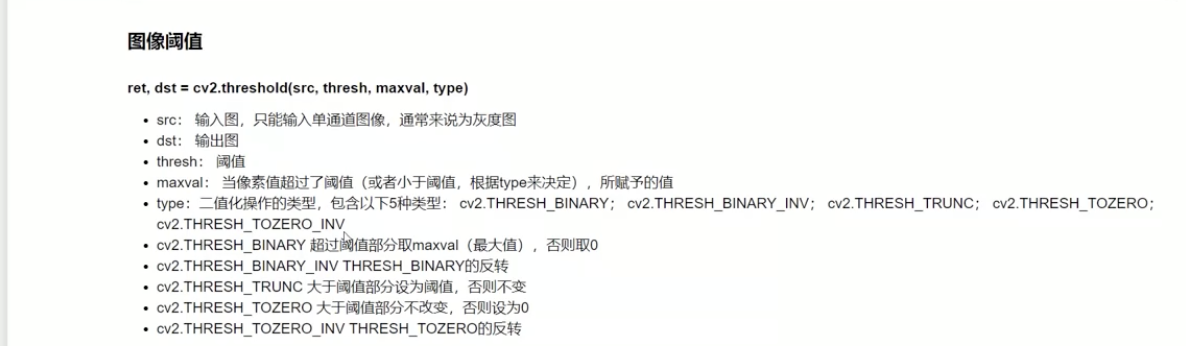
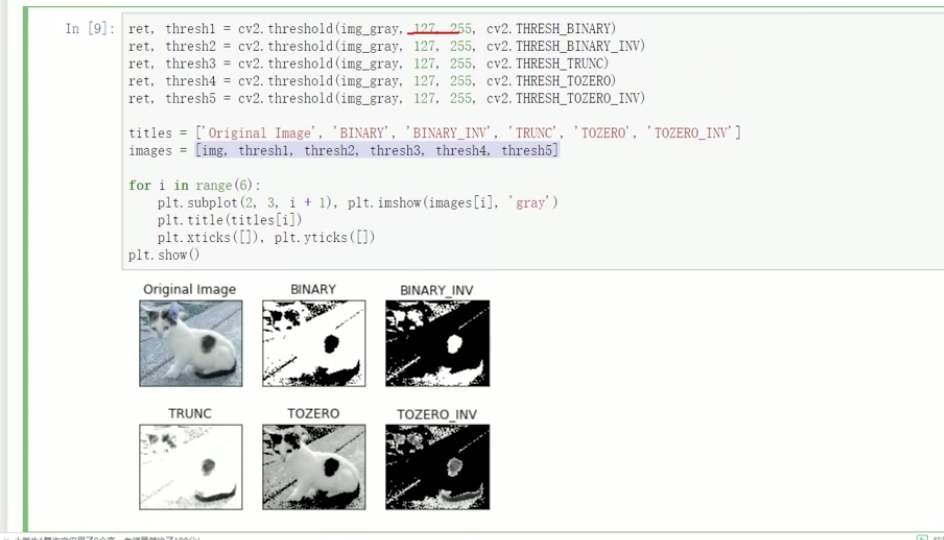
res=cv2.resize(img,(0,0),fx=1.5,fy=1)阈值判断
THRESH_BINARY:亮的全为白,黑的全为黑
THRESH_BINARY_INV:<127变成255,亮的变成黑的,黑的变成白的
THRESH_TRUNC:>127变成127,剩下的不改变,黑色部分不改变
THRESH_TOZERO:<127的变成0,黑色的部分更暗
图像平滑
均值滤波:
相当于构造一个filter=简单平均卷积操作
方框滤波:大于255的直接等于255
高斯滤波:构建高斯分布
中值滤波:使用中间值替代
#图像平滑
img2=cv2.imread('lenaNoise.png')
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
#均值滤波加起来除个数求均值,一般选(3,5,7)
blur=cv2.blur(img,(3,3))
cv2.imshow('blur',blur)
cv2.waitKey(0)
cv2.destroyAllWindows()
#方框滤波,基本和均值一样,可以选择归一化,大于255直接就是255
blur=cv2.boxFilter(img,-1,(3,3),normalize=True)
#高斯滤波,卷积核满足高斯分布
aussian = cv2.GaussianBlur(img,(5,5),1)
cv2.imshow('aussian',aussian)
cv2.waitKey(0)
cv2.destroyAllWindows()
#中值滤波,从小到大排序找中间值,中间值代替,不考虑噪声,推荐
median = cv2.medianBlur(img,5)
cv2.imshow('medien',medien)
cv2.waitKey(0)
cv2.destroyAllWindows()三、图像形态学操作
图像腐蚀和膨胀+开闭运算
当图片有一些杂纹,需要通过腐蚀来去掉
当腐蚀之后,可能对原图片有伤害,就要用膨胀恢复
#腐蚀操作,外面的颜色腐蚀里面,去掉杂纹
img=cv2.imread('dige.png')
cv2.imshow('img',img)
cv2.destoryAllWindows()
kernel = np.ones((3,3),np.unit8)
dige_erosion = cv2.erode(img,kernel,iterations = 1)
cv2.imshow('erosion',erosion)
cv2.waitKey(0)
cv2.destroyAllWindows()
#膨胀操作,里面的颜色扩张
kernel = np.ones((3,3),np.unit8)
dige_dilate = cv2.dilate(dige_erosion,kernel,iterations = 1)
cv2.imshow('dilate',dige_dilate)
cv2.waitKey(0)
cv2.destroyAllWindows()开运算:先腐蚀,再膨胀
闭运算:先膨胀,再腐蚀
#开运算:先腐蚀,再膨胀
img= cv2.imread('dige.png')
kernel = np.ones((5,5),np.unit8)
opening = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel)
#闭运算:先膨胀,再腐蚀
closing = cv2.morphologyEx(img,cv2.MORPH_CLOSE,kernel)梯度运算:
得到轮廓边界信息
#梯度运算:
#梯度=膨胀-腐蚀
pie= cv2.imread('pie.png')
kernel = np.ones((7,7),np.unit8)
dilate = cv2.dilate(pie,kernel,iterations = 5)
erosion = cv2.erode(pie,kernel,iterations = 5)
res = np.hstack((dilate,erosion))
gradient = cv2.morphologyEx(pie,cv2.MORPH_GRADIENT,kernel)
礼帽和黑帽
礼帽=原始输入-开运算(原始的杂纹=原始-无杂纹)TOPHAT
黑帽=闭运算-原始输入(原始的小轮廓)BLACKHAT
#礼帽=原始输入-开运算(原始的杂纹=原始-无杂纹)
img= cv2.imread('dige.png')
tophat=cv2.morphologyEx(img,cv2.MORPH_TOPHAT,kernel)
#黑帽=闭运算-原始输入(原始的小轮廓)
blackhat=cv2.morphologyEx(img,cv2.MORPH_BLACKHAT,kernel)