科研教育领域现状与机械臂需求洞察
AI、具身智能、强化学习正快速渗透到科研教育场景,传统实验设备已无法满足“高精度+高开放度+高安全”的三重需求。机械臂作为可验证算法、采集真值的核心载体,成为高校与研究院的“新基建”。
斯坦福大学《2025 AI Index Report》指出,2024年90 %以上的“里程碑级AI模型”由产业界发布,学术界虽仍贡献高被引研究,却普遍受限于“算法规模扩张与真实硬件验证之间的巨大落差”。实验室普遍缺“开箱即用”的科研级机械臂。
首荐科研教育机器人:性能参数与优势解析
最新Franka Research 3
基本参数:拥有7个自由度,重复定位精度高达±0.1mm,最大负载3kg,工作半径855mm。
性能优势:具备世界一流的力敏特性,能够精确感知和控制力,实现细腻的操作。加入全球顶尖机器人研究社区,无缝集成ROS、ROS 2、MATLAB等主流框架,共享前沿成果,让研究人员可以深入探索机器人控制和学习算法,为科研创新提供了广阔空间。

松灵PiPER
基本参数:6自由度设计,重复定位精度±0.1mm,最大负载2kg,工作半径626.75mm。
性能优势:集成先进的运动控制算法与高精度传感器,最细微的操作也能精准无误。其模块化设计使得维护和升级更加便捷,降低了使用成本。PiPER适配Python开发环境,简化开发流程,拓宽应用边界,兼容ROS1、ROS2,并提供URDF模型,同时支持基于Gazebo、issacsim仿真。

Kinova Gen 3
基本参数:7/6自由度,重复定位精度±0.1mm,最大负载4kg,工作半径902mm。
性能优势:具有出色的轻量化设计,重量仅7.2kg,便于携带和安装。采用先进电机与传动系统,运行稳定且定位精准。支持硬件支持包、ROS、C++和Python的编程方式、Gazebo和Movelt仿真环境。

睿尔曼RM65
基本参数:6/7自由度,重复定位精度±0.05mm,最大负载5kg,工作半径610mm。
性能优势:采用一体化、模块化设计,拆装更便捷,维护成本低;拥有超高兼容性,末端具备通用接口,灵活扩展,即插即用;开放的API函数库,支持C/C++/C#/Python编程语言,支持Windows/Linux/ROS机器人操作系统及多种通讯协议。

科研机器人应用案例:实践成果彰显价值
上海人工智能实验室、香港中文大学等联合发布“RoboFactory”框架,用Franka Research 3做实验,引入逻辑等组合约束,提高了多具身智能体协作的安全和效率。
多机协作竟能这么玩?!
香港大学、OpenDriveLab和AgiBot联合研发的UniVLA框架,提供了创新的解决方案,并在松灵PiPER六轴机械臂上成功验证了其有效性。
PiPER6轴协作机械臂科研再“出圈”
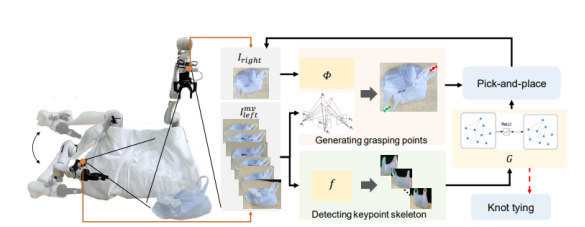
清华大学自动化系与LSBDPA北京重点实验室通过kinovaGen3双臂机器人系塑料袋演示,证明可变形物体操作对机器人具有重要的研究意义。
北京理工大学在无人机换电实验中,RM65-B连续完成1000次电池插拔无故障,MTBF>500 h,验证了超轻量臂在移动操作中的可靠性与精度
结语
BFT 平台推荐的这些科研教育机器人,凭借各自卓越性能,在科研教育领域发挥着不可替代的作用。从基础科研到教学实践,它们为科研人员与学生提供了强大工具,推动科研教育不断进步。随着技术持续创新,BFT 平台将不断完善 “科研教育机器人” 矩阵,为科研教育事业注入更多活力,助力培养更多创新人才,创造更多科研成果 。