有限马尔可夫决策过程:5x5 Gridworld
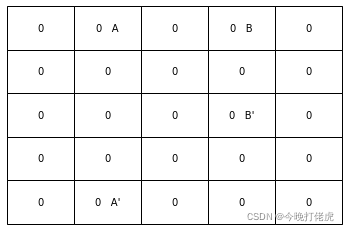
Grid World是一个矩形的网格世界环境,它包含了一个有限的马尔可夫决策过程,在这个环境中每个网格表示一个状态 s t a t e state state,每个状态可以执行的动作集合是 A = { 上,下,左,右 } A =\{上,下,左,右\} A={上,下,左,右}四个动作。每个动作会让 a g e n t agent agent沿着动作的方向移动一个单位距离,同时获得一个即时奖励0,如果 a g e n t agent agent在网格的边界上朝着离开网格的方向移动,会得到一个负激励-1,同时状态(位置)不发生变化。有两个特殊的状态 A 和 B A和B A和B, A A A状态执行任意动作都会得到一个正向激励+10,后继状态为 A ′ A' A′, B B B状态执行任意动作都会得到一个正向激励+5,后继状态为 B ′ B' B′。
Grid World 环境初始化
- ∣ S ∣ |\mathcal S| ∣S∣ : 5 × 5 5 \times 5 5×5
- s A = [ 0 , 1 ] s_A = [0, 1] sA=[0,1] : 特别状态 A A A,坐标即状态
- s A ′ = [ 4 , 1 ] s'_A = [4, 1] sA′=[4,1] : A ′ A' A′
- s B = [ 0 , 3 ] s_B = [0, 3] sB=[0,3] :特别状态 B B B
- s B ′ = [ 2 , 3 ] s'_B = [2, 3] sB′=[2,3] : B ′ B' B′
- γ = 0.9 \gamma = 0.9 γ=0.9 :discount rate
- A = [ [ 0 , − 1 ] , [ − 1 , 0 ] , [ 0 , 1 ] , [ 1 , 0 ] ] \mathcal A = [[0, -1], [-1, 0], [0, 1], [1, 0]] A=[[0,−1],[−1,0],[0,1],[1,0]] : 动作集合:
- a = [ 0 , − 1 ] a = [0, -1] a=[0,−1] : s + a = s ′ s + a = s' s+a=s′,y坐标-1相上移动1
- p ( a ∣ s ) = 0.25 p(a|s) = 0.25 p(a∣s)=0.25 : 在状态 s s s采取动作 a a a的概率
initi_env = np.zeros((WORLD_SIZE,WORLD_SIZE)).astype(int)
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.table import Table
WORLD_SIZE = 5 # grid_world's size
A_POS = [0, 1] # A location in grid world
A_PRIME_POS = [4, 1] # A' location
B_POS = [0, 3] # B location
B_PRIME_POS = [2, 3] # B' location
DISCOUNT = 0.9 # discount rate
# left, up, right, down
ACTIONS = [np.array([0, -1]),
np.array([-1, 0]),
np.array([0, 1]),
np.array([1, 0])]
ACTION_PROB = 0.25
状态更新: s t e p ( s , a ) → s ′ , r step(s, a) \to s', r step(s,a)→s′,r
def step(state, action):
if state == A_POS:
return A_PRIME_POS, 10
if state == B_POS:
return B_PRIME_POS, 5
next_state = (np.array(state) + action).tolist()
x, y = next_state
if x < 0 or x >= WORLD_SIZE or y < 0 or y >= WORLD_SIZE:
reward = -1.0
next_state = state
else:
reward = 0
return next_state, reward
根据贝尔曼方程估计 s t a t e _ v a l u e state\_value state_value
v π ( s ) = ∑ a π ( a ∣ s ) ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ v π ( s ′ ) ] , f o r _ a l l _ s ∈ S v_{\pi}(s) = \sum_a \pi(a|s)\sum_{s',r}p(s',r|s,a)[r + \gamma v_{\pi}(s')], for\_all\_s\in \mathcal S vπ(s)=a∑π(a∣s)s′,r∑p(s′,r∣s,a)[r+γvπ(s′)],for_all_s∈S
- π \pi π : 策略,状态到每个可能选择动作的概率映射
- v π v_{\pi} vπ : 在遵循策略 π \pi π的条件下,状态 s s s的状态值
- π ( a ∣ s ) \pi(a|s) π(a∣s) : 遵循策略 π \pi π,当状态为 s s s时,采取动作 a a a的概率
- p ( s ′ , r ∣ s , a ) p(s',r|s,a) p(s′,r∣s,a) : 状态转移概率, s → s ′ s \to s' s→s′
在Grid World环境中给定状态和动 s s s和动作 a a a的情况下,后继状态 s ′ s' s′和立即奖励 r r r是确定的,可以忽略转移概率 p p p,简化为:
v π ( s ) = ∑ a π ( a ∣ s ) [ r + γ v π ( s ′ ) ] v_{\pi}(s) = \sum_a \pi(a|s)[r +\gamma v_{\pi}(s')] vπ(s)=a∑π(a∣s)[r+γvπ(s′)]
- 随机策略:每个动作选择概率相同
- 贪心策略: v ∗ ( s ) = max π v π ( s ) = max a { r + γ v ∗ ( s ′ ) , a ∈ A } v^*(s) = \max\limits_{\pi} v_{\pi}(s) = \max\limits_{a}\{r+\gamma v^*(s'), a \in \mathcal A \} v∗(s)=πmaxvπ(s)=amax{r+γv∗(s′),a∈A}
随机策略
v k + 1 ( s ) = ∑ a π ( a ∣ s ) × ( r + γ v k ( s ′ ) ) v_{k+1}(s) = \sum_a \pi(a|s) \times \big(r + \mathcal{\gamma}v_k(s')\big) vk+1(s)=a∑π(a∣s)×(r+γvk(s′))
- k k k : 迭代更新的次数
- v k + 1 ( s ) v_{k+1}(s) vk+1(s) : 状态 s s s第 k + 1 k+1 k+1次状态值
def random_policy():
# 初始化状态值为 0
value = np.zeros((WORLD_SIZE, WORLD_SIZE))
value_history = [value]
while True:
new_value = np.zeros_like(value)
for i in range(WORLD_SIZE):
for j in range(WORLD_SIZE):
for action in ACTIONS:
(next_i, next_j), reward = step([i, j], action)
# 动作概率 *(即时奖励 + 折扣* 后继状态值)
new_value[i, j] += ACTION_PROB * (reward + DISCOUNT * value[next_i, next_j])
# 判断是否value收敛
if np.max(np.abs(new_value - value)) < 1e-4:
break
value = new_value
value_history.append(value)
return value_history
状态值的更新过程:同步更新
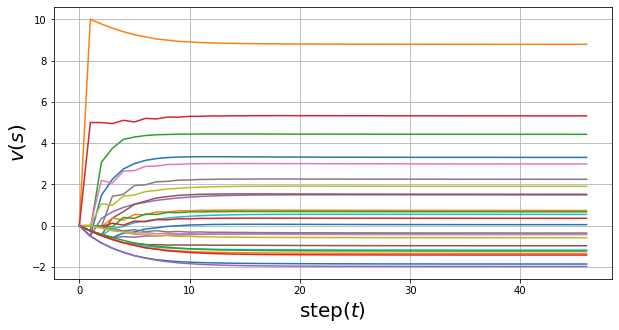
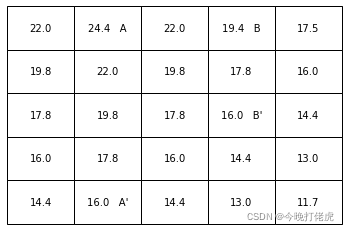
状态值:
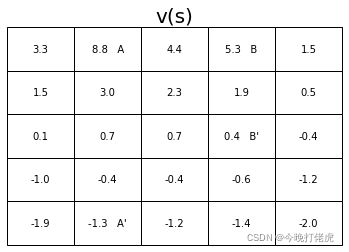
从上图中可以发现, A A A的期望回报略低于它的及时奖励,这是因为 A A A总是跳转到 A ′ A' A′, A ′ A' A′在网格的边界处,得到一个负激励的概率比较大。 B B B的期望汇报略高于它的及时奖励,这是因为 B ′ B' B′只有一个方向距离边界较近,所以获得负激励的概率较小。
贪心策略
v ∗ ( s ) = max a q π ∗ ( s , a ) v_*(s) = \max \limits_{a} q_{\pi_*}(s, a) v∗(s)=amaxqπ∗(s,a)
def optimal_policy():
value = np.zeros((WORLD_SIZE, WORLD_SIZE))
value_history = [value]
while True:
new_value = np.zeros_like(value)
for i in range(WORLD_SIZE):
for j in range(WORLD_SIZE):
# 记录每个动作的value
values = []
for action in ACTIONS:
(next_i, next_j), reward = step([i, j], action)
# 及时奖励 + 折扣 * 后继状态值
values.append(reward + DISCOUNT * value[next_i, next_j])
new_value[i, j] = np.max(values)
if np.max(np.abs(new_value - value)) < 1e-4:
break
value = new_value
value_history.append(value)
return value_history
状态值的更新过程:
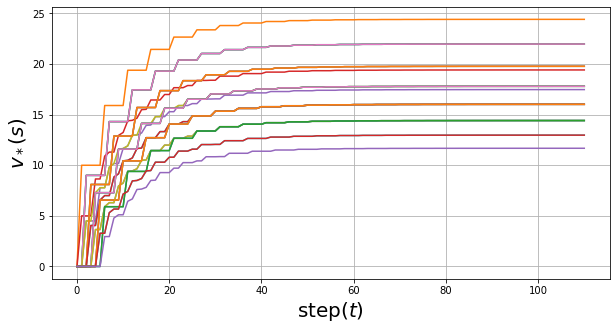
大约经过110次迭代后收敛,收敛后的状态值:
加速状态值的收敛 “in place"更新方法 异步更新
while True:
new_value = np.zeros_like(value)
for i in range(WORLD_SIZE):
for j in range(WORLD_SIZE):
# 记录每个动作的value
values = []
for action in ACTIONS:
(next_i, next_j), reward = step([i, j], action)
# 及时奖励 + 折扣 * 后继状态值
values.append(reward + DISCOUNT * value[next_i, next_j])
new_value[i, j] = np.max(values)
value = new_value
上面的迭代策略估计中,用了两个变量value和new_value,分别来表示两个相邻的旧状态值和新状态值。上面更新方法中,每计算出一个状态的值后,存入new_value,直到全部状态计算完成,才更新value中的值,这会影响到状态值收敛的速度。"in place"方式就是,每计算出一个状态值,就更新到value,做到及更即用。
随机策略,In place
不同更新方式,值函数收敛速度对比
def random_policy():
# 初始化状态值为 0
value = np.zeros((WORLD_SIZE, WORLD_SIZE))
value_history = [np.copy(value)]
while True:
for i in range(WORLD_SIZE):
for j in range(WORLD_SIZE):
expect_value = 0
for action in ACTIONS:
(next_i, next_j), reward = step([i, j], action)
# 动作概率 *(即时奖励 + 折扣* 后继状态值)
expect_value += ACTION_PROB * (reward + DISCOUNT * value[next_i, next_j])
value[i, j] = expect_value
value_history.append(np.copy(value))
# 判断是否value收敛
if np.max(np.abs(value_history[-1] - value_history[-2])) < 1e-4:
break
return value_history

贪心策略
def optimal_policy():
# 初始化状态值为 0
value = np.zeros((WORLD_SIZE, WORLD_SIZE))
value_history = [np.copy(value)]
while True:
for i in range(WORLD_SIZE):
for j in range(WORLD_SIZE):
values = []
for action in ACTIONS:
(next_i, next_j), reward = step([i, j], action)
# 及时奖励 + 折扣 * 后继状态值
values.append(reward + DISCOUNT * value[next_i, next_j])
value[i, j] = np.max(values)
value_history.append(np.copy(value))
# 判断是否value收敛
if np.max(np.abs(value_history[-1] - value_history[-2])) < 1e-4:
break
return value_history

"in place"方式对随机策略影响不大,但是在最优策略下,收敛时间是原来的五分之一左右。