点多边形测试
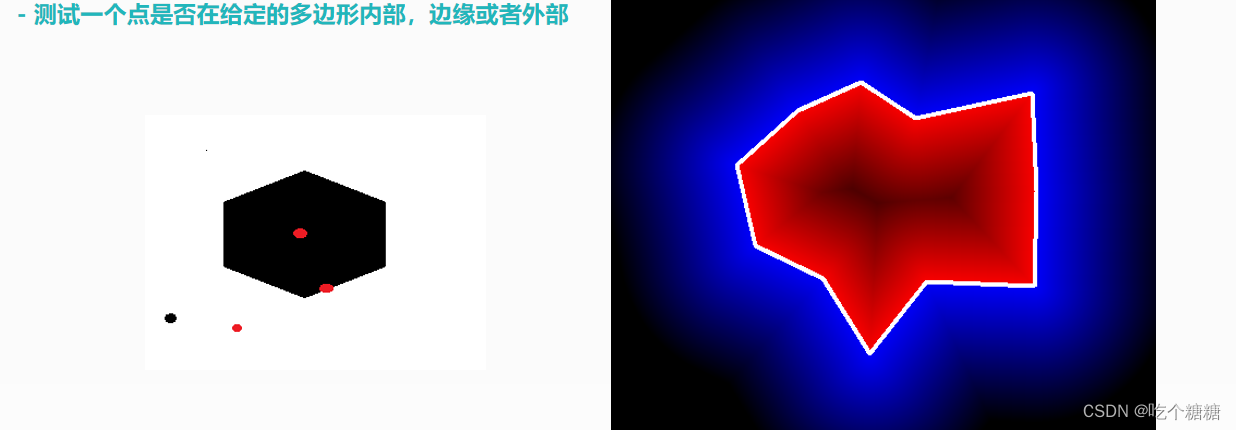
pointPolygonTest
pointPolygonTest(
InputArray contour,
Point2f pt,
bool measureDist
)
返回数据是double类型
示例
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>
using namespace std;
using namespace cv;
int main(int argc, char** argv) {
const int r = 100;
Mat src = Mat::zeros(r * 4, r * 4, CV_8UC1);
vector<Point2f> vert(6);
vert[0] = Point(3 * r / 2, static_cast<int>(1.34*r));
vert[1] = Point(1 * r, 2 * r);
vert[2] = Point(3 * r / 2, static_cast<int>(2.866*r));
vert[3] = Point(5 * r / 2, static_cast<int>(2.866*r));
vert[4] = Point(3 * r, 2 * r);
vert[5] = Point(5 * r / 2, static_cast<int>(1.34*r));
for (int i = 0; i < 6; i++) {
line(src, vert[i], vert[(i + 1) % 6], Scalar(255), 3, 8, 0);
}
vector<vector<Point>> contours;
vector<Vec4i> hierachy;
Mat csrc;
src.copyTo(csrc);
findContours(csrc, contours, hierachy, RETR_TREE, CHAIN_APPROX_SIMPLE, Point(0, 0));
Mat raw_dist = Mat::zeros(csrc.size(), CV_32FC1);
for (int row = 0; row < raw_dist.rows; row++) {
for (int col = 0; col < raw_dist.cols; col++) {
double dist = pointPolygonTest(contours[0], Point2f(static_cast<float>(col), static_cast<float>(row)), true);
raw_dist.at<float>(row, col) = static_cast<float>(dist);
}
}
double minValue, maxValue;
minMaxLoc(raw_dist, &minValue, &maxValue, 0, 0, Mat());
Mat drawImg = Mat::zeros(src.size(), CV_8UC3);
for (int row = 0; row < drawImg.rows; row++) {
for (int col = 0; col < drawImg.cols; col++) {
float dist = raw_dist.at<float>(row, col);
if (dist > 0) {
drawImg.at<Vec3b>(row, col)[0] = (uchar)(abs(1.0 - (dist / maxValue)) * 255);
}
else if (dist < 0) {
drawImg.at<Vec3b>(row, col)[2] = (uchar)(abs(1.0 - (dist / minValue)) * 255);
} else {
drawImg.at<Vec3b>(row, col)[0] = (uchar)(abs(255 - dist));
drawImg.at<Vec3b>(row, col)[1] = (uchar)(abs(255 - dist));
drawImg.at<Vec3b>(row, col)[2] = (uchar)(abs(255 - dist));
}
}
}
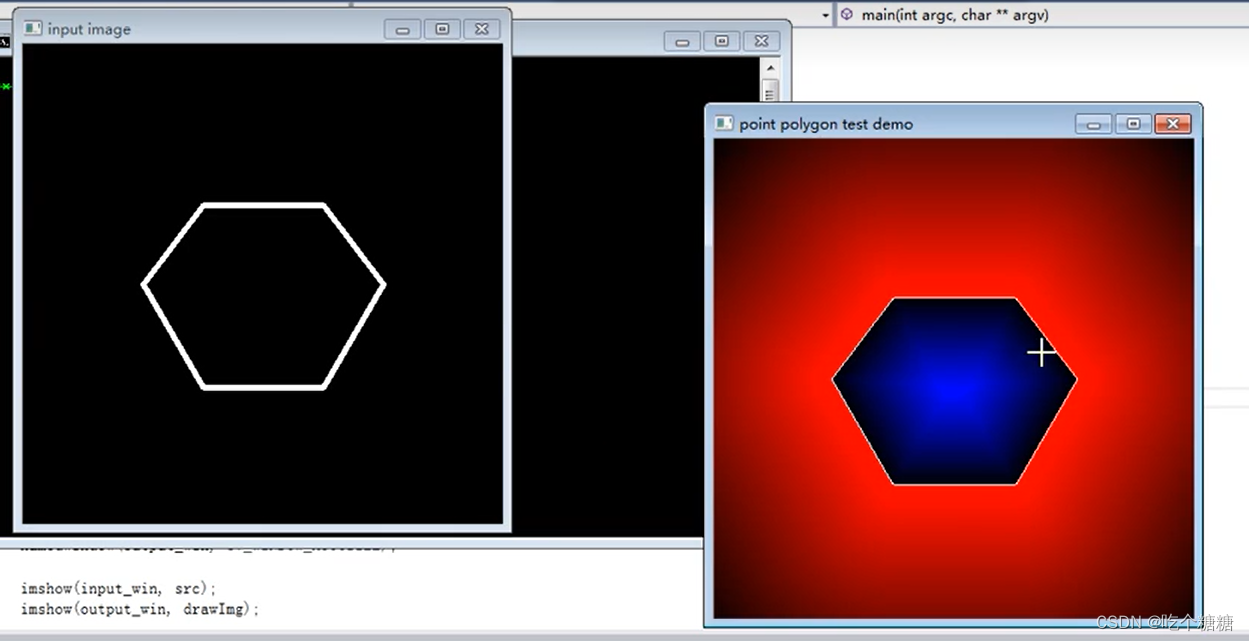
const char* output_win = "point polygon test demo";
char input_win[] = "input image";
namedWindow(input_win, CV_WINDOW_AUTOSIZE);
namedWindow(output_win, CV_WINDOW_AUTOSIZE);
imshow(input_win, src);
imshow(output_win, drawImg);
waitKey(0);
return 0;
}