SSD网络
目标检测问题可以分为以下两个问题:1)分类:所有类别的概率;2)定位: 4个值(中心位置x,y,宽w,高h)

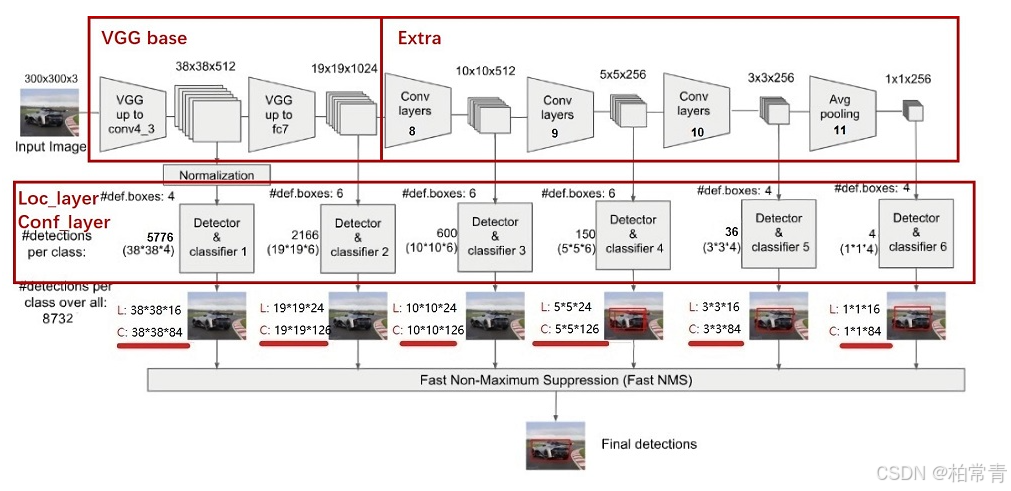
Single Shot MultiBox Detector,SSD:单阶段的目标检测算法,通过卷积神经网络进行特征提取,取不同的特征层进行检测输出,所以SSD是一种多尺度的检测方法。
SSD的框架:

SSD模型结构

SSD采用VGG16作为基础模型,然后在VGG16的基础上新增了卷积层来获得更多的特征图,利用了多尺度的特征图做检测。SSD先通过卷积不断进行特征提取,在需要检测物体的网络,直接通过一个3 ×3卷积得到输出,卷积的通道数由anchor数量和类别数量决定,具体为(anchor数量*(类别数量+4))。
多尺度检测:在SSD的网络结构图中我们可以看到,SSD使用了多个特征层,特征层的尺寸分别是38 × 38,19 ×19,10 ×10,5 ×5,3 ×3,1 ×1一共6种不同的特征图尺寸。大尺度特征图(较靠前的特征图)可以用来检测小物体,而小尺度特征图(较靠后的特征图)用来检测大物体。多尺度检测的方式,可以使得检测更加充分(SSD属于密集检测),更能检测出小目标。
SSD模型构建
VGG16 Base Layer, Extra Feature Layer, Detection Layer, NMS, Anchor
vgg16
from mindspore import nn
def _make_layer(channels):
in_channels = channels[0]
layers = []
for out_channels in channels[1:]:
layers.append(nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=3))
layers.append(nn.ReLU())
in_channels = out_channels
return nn.SequentialCell(layers)
class Vgg16(nn.Cell):
"""VGG16 module."""
def __init__(self):
super(Vgg16, self).__init__()
self.b1 = _make_layer([3, 64, 64])
self.b2 = _make_layer([64, 128, 128])
self.b3 = _make_layer([128, 256, 256, 256])
self.b4 = _make_layer([256, 512, 512, 512])
self.b5 = _make_layer([512, 512, 512, 512])
self.m1 = nn.MaxPool2d(kernel_size=2, stride=2, pad_mode='SAME')
self.m2 = nn.MaxPool2d(kernel_size=2, stride=2, pad_mode='SAME')
self.m3 = nn.MaxPool2d(kernel_size=2, stride=2, pad_mode='SAME')
self.m4 = nn.MaxPool2d(kernel_size=2, stride=2, pad_mode='SAME')
self.m5 = nn.MaxPool2d(kernel_size=3, stride=1, pad_mode='SAME')
def construct(self, x):
# block1
x = self.b1(x)
x = self.m1(x)
# block2
x = self.b2(x)
x = self.m2(x)
# block3
x = self.b3(x)
x = self.m3(x)
# block4
x = self.b4(x)
block4 = x
x = self.m4(x)
# block5
x = self.b5(x)
x = self.m5(x)
return block4, x
ssd300vgg16
import mindspore as ms
import mindspore.nn as nn
import mindspore.ops as ops
def _last_conv2d(in_channel, out_channel, kernel_size=3, stride=1, pad_mod='same', pad=0):
in_channels = in_channel
out_channels = in_channel
depthwise_conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, pad_mode='same',
padding=pad, group=in_channels)
conv = nn.Conv2d(in_channel, out_channel, kernel_size=1, stride=1, padding=0, pad_mode='same', has_bias=True)
bn = nn.BatchNorm2d(in_channel, eps=1e-3, momentum=0.97,
gamma_init=1, beta_init=0, moving_mean_init=0, moving_var_init=1)
return nn.SequentialCell([depthwise_conv, bn, nn.ReLU6(), conv])
class FlattenConcat(nn.Cell):
"""FlattenConcat module."""
def __init__(self):
super(FlattenConcat, self).__init__()
self.num_ssd_boxes = 8732
def construct(self, inputs):
output = ()
batch_size = ops.shape(inputs[0])[0]
for x in inputs:
x = ops.transpose(x, (0, 2, 3, 1))
output += (ops.reshape(x, (batch_size, -1)),)
res = ops.concat(output, axis=1)
return ops.reshape(res, (batch_size, self.num_ssd_boxes, -1))
class MultiBox(nn.Cell):
"""
Multibox conv layers. Each multibox layer contains class conf scores and localization predictions.
"""
def __init__(self):
super(MultiBox, self).__init__()
num_classes = 81
out_channels = [512, 1024, 512, 256, 256, 256]
num_default = [4, 6, 6, 6, 4, 4]
loc_layers = []
cls_layers = []
for k, out_channel in enumerate(out_channels):
loc_layers += [_last_conv2d(out_channel, 4 * num_default[k],
kernel_size=3, stride=1, pad_mod='same', pad=0)]
cls_layers += [_last_conv2d(out_channel, num_classes * num_default[k],
kernel_size=3, stride=1, pad_mod='same', pad=0)]
self.multi_loc_layers = nn.CellList(loc_layers)
self.multi_cls_layers = nn.CellList(cls_layers)
self.flatten_concat = FlattenConcat()
def construct(self, inputs):
loc_outputs = ()
cls_outputs = ()
for i in range(len(self.multi_loc_layers)):
loc_outputs += (self.multi_loc_layers[i](inputs[i]),)
cls_outputs += (self.multi_cls_layers[i](inputs[i]),)
return self.flatten_concat(loc_outputs), self.flatten_concat(cls_outputs)
class SSD300Vgg16(nn.Cell):
"""SSD300Vgg16 module."""
def __init__(self):
super(SSD300Vgg16, self).__init__()
# VGG16 backbone: block1~5
self.backbone = Vgg16()
# SSD blocks: block6~7
self.b6_1 = nn.Conv2d(in_channels=512, out_channels=1024, kernel_size=3, padding=6, dilation=6, pad_mode='pad')
self.b6_2 = nn.Dropout(p=0.5)
self.b7_1 = nn.Conv2d(in_channels=1024, out_channels=1024, kernel_size=1)
self.b7_2 = nn.Dropout(p=0.5)
# Extra Feature Layers: block8~11
self.b8_1 = nn.Conv2d(in_channels=1024, out_channels=256, kernel_size=1, padding=1, pad_mode='pad')
self.b8_2 = nn.Conv2d(in_channels=256, out_channels=512, kernel_size=3, stride=2, pad_mode='valid')
self.b9_1 = nn.Conv2d(in_channels=512, out_channels=128, kernel_size=1, padding=1, pad_mode='pad')
self.b9_2 = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, stride=2, pad_mode='valid')
self.b10_1 = nn.Conv2d(in_channels=256, out_channels=128, kernel_size=1)
self.b10_2 = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, pad_mode='valid')
self.b11_1 = nn.Conv2d(in_channels=256, out_channels=128, kernel_size=1)
self.b11_2 = nn.Conv2d(in_channels=128, out_channels=256, kernel_size=3, pad_mode='valid')
# boxes
self.multi_box = MultiBox()
def construct(self, x):
# VGG16 backbone: block1~5
block4, x = self.backbone(x)
# SSD blocks: block6~7
x = self.b6_1(x) # 1024
x = self.b6_2(x)
x = self.b7_1(x) # 1024
x = self.b7_2(x)
block7 = x
# Extra Feature Layers: block8~11
x = self.b8_1(x) # 256
x = self.b8_2(x) # 512
block8 = x
x = self.b9_1(x) # 128
x = self.b9_2(x) # 256
block9 = x
x = self.b10_1(x) # 128
x = self.b10_2(x) # 256
block10 = x
x = self.b11_1(x) # 128
x = self.b11_2(x) # 256
block11 = x
# boxes
multi_feature = (block4, block7, block8, block9, block10, block11)
pred_loc, pred_label = self.multi_box(multi_feature)
if not self.training:
pred_label = ops.sigmoid(pred_label)
pred_loc = pred_loc.astype(ms.float32)
pred_label = pred_label.astype(ms.float32)
return pred_loc, pred_label