一、图像阈值处理的核心价值
图像阈值处理是计算机视觉领域最基础且重要的预处理技术之一,它通过将灰度图像转换为二值图像,为后续的图像分析(如边缘检测、目标识别、特征提取等)奠定基础。在工业检测、医学成像、自动驾驶等场景中,阈值处理技术发挥着不可替代的作用。
二、阈值处理原理剖析
2.1 基本数学模型
设原图像为I(x,y),处理后的图像为D(x,y),阈值为T,则基本阈值公式为:
D(x,y) =
255, 当 I(x,y) > T
0, 其他情况
此过程将灰度图像转换为黑白分明的二值图像,OpenCV中通过cv2.threshold()函数实现。
2.2 关键处理步骤
色彩空间转换:将BGR图像转为灰度图(
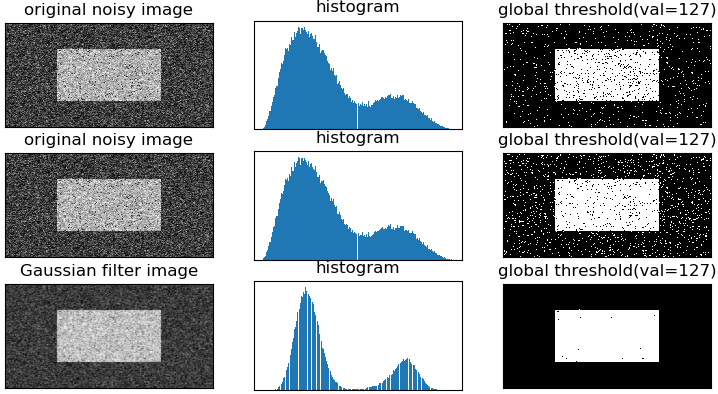
cv2.COLOR_BGR2GRAY)平滑处理:使用高斯滤波(
cv2.GaussianBlur)消除噪声阈值计算:根据算法确定最佳阈值T
二值化处理:应用阈值进行像素分类
三、全局阈值处理方法详解
3.1 基础阈值处理
import cv2
img = cv2.imread('document.jpg', 0) # 灰度读取
_, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)参数说明:
127:手动设置的阈值
255:最大值
cv2.THRESH_BINARY:处理类型
3.2 Otsu大津算法
通过最大化类间方差自动确定最优阈值:
_, otsu = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU)算法流程:
计算图像直方图
遍历所有可能阈值(0-255)
计算前景与背景的类间方差
选择方差最大的阈值
3.3 Triangle三角形法
适用于单峰直方图图像:
_, tri = cv2.threshold(img, 0, 255, cv2.THRESH_TRIANGLE)实现原理:
寻找直方图最高峰
向右侧最低点画直线
计算最大垂直距离
对应位置即为最佳阈值
四、局部自适应阈值技术
4.1 均值自适应
th2 = cv2.adaptiveThreshold(img, 255,
cv2.ADAPTIVE_THRESH_MEAN_C,
cv2.THRESH_BINARY, 11, 2)参数解析:
11:邻域大小(必须奇数)
2:常数偏移量
4.2 高斯加权自适应
th3 = cv2.adaptiveThreshold(img, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY, 17, 3)两种方法对比:
| 方法类型 | 计算方式 | 适用场景 |
|---|---|---|
| 均值法 | 邻域平均值 | 光照渐变平缓区域 |
| 高斯法 | 高斯加权平均值 | 存在局部高对比度区域 |
五、特殊阈值处理技巧
5.1 半阈值处理
保留部分灰度信息:
_, semi_th = cv2.threshold(img, 200, 255,
cv2.THRESH_BINARY + cv2.THRESH_OTSU)
semi_th = cv2.addWeighted(img, 0.3, semi_th, 0.7, 0)5.2 多级阈值处理
ret, multi = cv2.threshold(img, 0, 255,
cv2.THRESH_BINARY + cv2.THRESH_OTSU)
multi[(img > ret*0.5) & (img <= ret)] = 1275.3 动态阈值更新
def update_threshold(val):
global img
_, th = cv2.threshold(img, val, 255, cv2.THRESH_BINARY)
cv2.imshow('Adjust', th)
cv2.createTrackbar('Threshold', 'Adjust', 127, 255, update_threshold)六、实战应用案例
6.1 文档数字化处理
def process_document(img_path):
img = cv2.imread(img_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (5,5), 0)
_, th = cv2.threshold(blur, 0, 255,
cv2.THRESH_BINARY+cv2.THRESH_OTSU)
return th处理效果提升技巧:
先进行透视校正
结合形态学操作去除噪点
使用锐化增强文字边缘
6.2 工业零件检测
def detect_components(img):
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
th = cv2.adaptiveThreshold(gray, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV, 51, 12)
contours, _ = cv2.findContours(th, cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
valid_contours = [c for c in contours
if 5000 < cv2.contourArea(c) < 20000]
return cv2.drawContours(img, valid_contours, -1, (0,255,0), 3)6.3 医学图像分析
def analyze_xray(img):
clahe = cv2.createCLAHE(clipLimit=3.0, tileGridSize=(8,8))
enhanced = clahe.apply(img)
_, th = cv2.threshold(enhanced, 0, 255,
cv2.THRESH_BINARY+cv2.THRESH_TRIANGLE)
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5))
opened = cv2.morphologyEx(th, cv2.MORPH_OPEN, kernel)
return opened七、性能优化与调试技巧
7.1 处理速度优化
使用积分图加速自适应阈值计算
对ROI区域进行局部处理
并行化处理多通道图像

7.2 常见问题排查
过度分割:增大邻域尺寸,调整偏移量
细节丢失:改用自适应方法或结合边缘检测
噪声干扰:预处理阶段加强滤波
光照不均:使用CLAHE进行直方图均衡
7.3 参数调优指南
| 参数 | 影响范围 | 调整策略 |
|---|---|---|
| 邻域大小 | 细节保留程度 | 根据目标尺寸选择奇数大小 |
| 偏移常数 | 阈值敏感度 | 按经验值±2逐步调整 |
| 高斯核大小 | 平滑效果 | 3-7之间的奇数 |
| 形态学操作 | 形状完整性 | 根据目标形状选择结构元素 |
八、未来发展趋势
深度学习结合:使用神经网络预测最优阈值
三维阈值处理:扩展至体积数据(CT/MRI)
动态场景适应:实时调整阈值的智能系统
多光谱处理:融合多个波段的阈值信息
结语
图像阈值处理作为计算机视觉的基石技术,其重要性随着智能系统的发展日益凸显。掌握各种阈值处理方法的核心原理和适用场景,能够帮助开发者在实际项目中灵活应对各种图像处理挑战。