傅里叶变换在图像处理中的应用与实践详解(超详细教程+实战代码)
🚀 本文从零开始详解傅里叶变换在图像处理中的应用,手把手教你实现图像去噪与边缘提取!全文配套Python代码,新手也能轻松上手!
一、傅里叶变换:图像处理的"透视镜"
在图像处理领域,傅里叶变换就像一把神奇的"透视镜",它能让我们透过表象看到图像的本质。通过傅里叶变换,我们可以将图像从空间域(我们肉眼看到的样子)转换到频率域(图像在不同频率下的分解组成),从而用全新的视角观察和处理图像。
1.1 傅里叶变换原理简介
傅里叶变换的核心思想是:任何信号都可以分解为不同频率正弦波的叠加。对于图像这种二维信号,我们使用二维离散傅里叶变换(DFT):
F ( u , v ) = ∑ x = 0 M − 1 ∑ y = 0 N − 1 f ( x , y ) ⋅ e − j 2 π ( u x M + v y N ) F(u,v) = \sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x,y) \cdot e^{-j2\pi(\frac{ux}{M}+\frac{vy}{N})} F(u,v)=x=0∑M−1y=0∑N−1f(x,y)⋅e−j2π(Mux+Nvy)
🔍 生活化理解:想象你在看一幅画。普通人看到的是整体画面,而傅里叶变换就像把这幅画拆解成不同的组成部分:大块色彩区域(低频部分)和精细纹理细节(高频部分)。就像音乐可以分解为低音、中音和高音一样,图像也可以分解为不同的频率成分。
1.2 为什么要使用频域处理?
在频域处理图像有三大优势:
- 分离特征:图像的不同特征(背景、纹理、边缘、噪声)在频域中被清晰分开
- 简化计算:某些复杂的空域运算(如卷积)在频域中变成简单的乘法
- 针对性处理:可以有选择地处理图像的特定频率成分(例如只去除噪声)
试想:如果要从一桶混合的彩色弹珠中挑出特定颜色,你是一颗一颗筛选快,还是先按颜色分类再整批处理快?频域处理就是这种"分类处理"的思路。
1.3 图像频率的直观解释
在谈图像频率时,我们实际上在讨论图像中像素值变化的快慢:
- 低频:表示图像中灰度值变化缓慢的区域,如蓝天、墙面等大面积颜色相近的区域
- 高频:表示图像中灰度值变化剧烈的区域,如物体边缘、细节纹理和噪声
简而言之,像素值变化越剧烈的区域,其频率成分就越高。这就是为什么噪声和边缘在频域中都表现为高频信息。
二、实战目标:椒盐噪声去除与边缘提取
本文将通过一个实际案例,带你掌握傅里叶变换在图像处理中的应用。我们将:
🔍 将带椒盐噪声的图像转换到频域空间
🧹 设计并应用低通滤波器去除噪声
✏️ 使用高通滤波器提取图像边缘信息
📊 直观比较不同处理方法的效果
三、实战代码详解(全中文注释)
import cv2
import numpy as np
import matplotlib.pyplot as plt
def perform_fourier_transform(image):
"""
执行二维傅里叶变换,将图像从空域转换到频域
:param image: 输入灰度图像
:return: 频移后的频谱
"""
# 进行二维傅里叶变换,得到复数形式的频谱
f = np.fft.fft2(image)
# 将零频率分量(直流分量)移到频谱中心,便于观察和处理
fshift = np.fft.fftshift(f)
return fshift
def low_pass_filter(fshift, cutoff):
"""
实现理想低通滤波器,用于保留图像低频信息(如背景、大面积区域),去除高频噪声
:param fshift: 频移后的频谱
:param cutoff: 截止频率半径(决定保留多少低频信息)
:return: 滤波后的频谱
"""
rows, cols = fshift.shape
# 找到频谱中心点坐标
crow, ccol = rows // 2, cols // 2
# 创建全黑(全零)的掩膜图像
mask = np.zeros((rows, cols), np.uint8)
r = cutoff
center = [crow, ccol]
# 创建网格坐标,用于计算每个点到中心的距离
x, y = np.ogrid[:rows, :cols]
# 创建圆形区域(圆内为1,圆外为0)
mask_area = (x - center[0]) ** 2 + (y - center[1]) ** 2 <= r * r
# 将圆内区域置为1,表示保留这些频率成分
mask[mask_area] = 1
# 将频谱与掩膜相乘,实现低通滤波(保留圆内低频,去除圆外高频)
fshift = fshift * mask
return fshift
def high_pass_filter(fshift, cutoff):
"""
实现理想高通滤波器,用于保留图像高频信息(如边缘、细节),去除低频信息
:param fshift: 频移后的频谱
:param cutoff: 截止频率半径(决定去除多少低频信息)
:return: 滤波后的频谱
"""
rows, cols = fshift.shape
# 找到频谱中心点坐标
crow, ccol = rows // 2, cols // 2
# 创建全白(全1)的掩膜图像
mask = np.ones((rows, cols), np.uint8)
r = cutoff
center = [crow, ccol]
# 创建网格坐标,用于计算每个点到中心的距离
x, y = np.ogrid[:rows, :cols]
# 创建圆形区域(圆内为0,圆外为1)
mask_area = (x - center[0]) ** 2 + (y - center[1]) ** 2 <= r * r
# 将圆内区域置为0,表示去除这些频率成分
mask[mask_area] = 0
# 将频谱与掩膜相乘,实现高通滤波(去除圆内低频,保留圆外高频)
fshift = fshift * mask
return fshift
def inverse_fourier_transform(fshift):
"""
执行傅里叶逆变换,将图像从频域转回空域
:param fshift: 频移后的频谱
:return: 空域图像
"""
# 将频谱中心的零频率分量移回原位
f_ishift = np.fft.ifftshift(fshift)
# 执行二维傅里叶逆变换
img_back = np.fft.ifft2(f_ishift)
# 取复数的绝对值,得到实际的图像灰度值
img_back = np.abs(img_back)
return img_back
# 读取待处理的椒盐噪声图像
image_path = (r"C:\Users\W01\Desktop\img\noise\salt-and-pepper noise.png")
image = cv2.imread(image_path, 0) # 以灰度模式读取图像
# 检查图片是否成功读取
if image is None:
print(f"无法读取图片,请检查路径是否正确: {image_path}")
else:
# 【步骤1】进行傅里叶变换,将图像转换到频域
fshift = perform_fourier_transform(image)
# 【步骤2】低通滤波去噪(截止频率为30)
low_pass_fshift = low_pass_filter(fshift, 30)
denoised_image = inverse_fourier_transform(low_pass_fshift)
# 【步骤3】高通滤波提取边缘(截止频率为10)
high_pass_fshift = high_pass_filter(low_pass_fshift, 10)
edge_image = inverse_fourier_transform(high_pass_fshift)
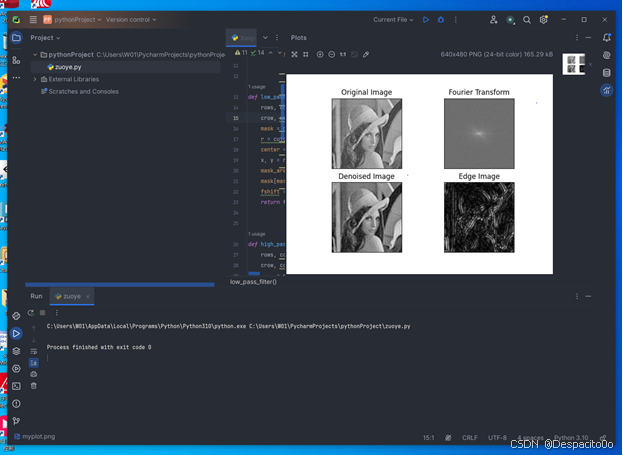
# 【步骤4】可视化结果,展示原图、频谱、去噪后图像和边缘图
plt.subplot(221), plt.imshow(image, cmap='gray')
plt.title('原始椒盐噪声图像'), plt.xticks([]), plt.yticks([])
plt.subplot(222), plt.imshow(np.log(1 + np.abs(fshift)), cmap='gray')
plt.title('傅里叶变换频谱'), plt.xticks([]), plt.yticks([])
plt.subplot(223), plt.imshow(denoised_image, cmap='gray')
plt.title('低通滤波去噪后图像'), plt.xticks([]), plt.yticks([])
plt.subplot(224), plt.imshow(edge_image, cmap='gray')
plt.title('高通滤波提取边缘'), plt.xticks([]), plt.yticks([])
# 自动调整子图布局,使其填充整个图像区域
plt.tight_layout()
plt.show()
四、深入理解频域处理原理
4.1 图像的频域表示:一种全新视角
当我们将图像转换到频域,实际上是在分析图像中不同频率的变化情况:
- 低频部分(频谱中心):代表图像中变化缓慢的区域,比如蓝天、墙面等大面积颜色相近的区域
- 高频部分(频谱边缘):代表图像中变化剧烈的区域,比如物体边缘、细小纹理和噪声
⚙️ 技术细节:频谱图中心亮点(零频率)代表图像的平均亮度,越靠近中心的点表示图像中变化越缓慢的部分,越远离中心的点表示变化越剧烈的部分。
将图像转换到频域的关键代码是:
f = np.fft.fft2(image) # 二维傅里叶变换
fshift = np.fft.fftshift(f) # 将零频率移到中心
为什么要将零频率移到中心?
原始的FFT结果将零频率成分放在了左上角,不利于观察和处理。通过fftshift函数,我们将零频率移到频谱中心,这样更符合我们的认知习惯:从中心向外,频率由低到高。
4.2 低通滤波:去除噪声的利器
椒盐噪声的特点:在图像中表现为随机黑白像素点,在频域中则表现为分散在各处的高频成分。
低通滤波的工作原理图解:
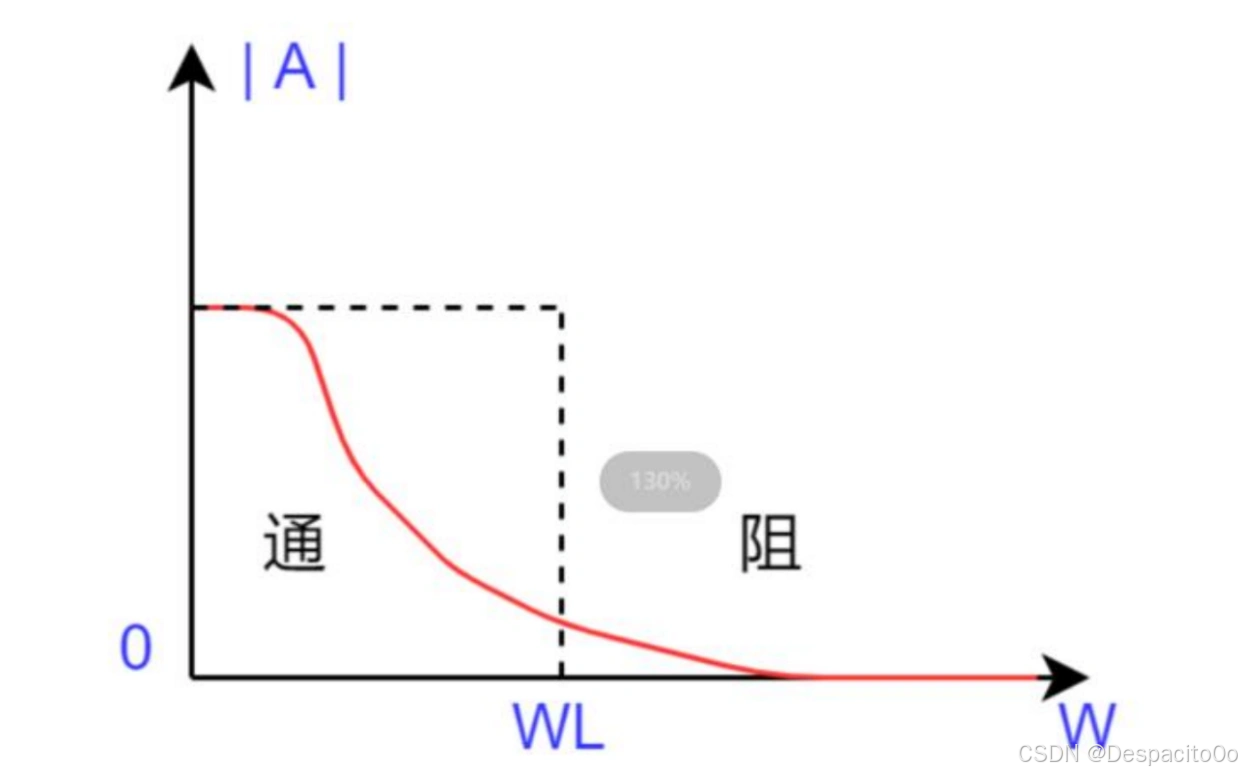
低通滤波步骤:
- 在频谱中心画一个圆形区域(保留区)
- 将圆内的频率成分保留(乘以1),圆外的成分去除(乘以0)
- 进行逆变换,得到去噪后的图像
# 低通滤波关键代码解析
mask = np.zeros((rows, cols), np.uint8) # 创建黑色蒙版
mask_area = (x - center[0]) ** 2 + (y - center[1]) ** 2 <= r * r # 圆形区域方程
mask[mask_area] = 1 # 圆内区域置为1
fshift = fshift * mask # 应用蒙版,保留低频,去除高频
截止频率(cutoff)的选择技巧:
- 较小的值(10-20):过滤更多噪声,但可能损失细节
- 较大的值(40-60):保留更多细节,但可能无法完全去噪
- 最佳起点:对于512×512图像,推荐从30开始尝试
4.3 高通滤波:图像边缘提取神器
高通滤波与低通滤波正好相反,它保留高频信息(变化剧烈的部分),去除低频信息(变化平缓的部分),因此特别适合边缘提取。
高通滤波的工作原理图解:
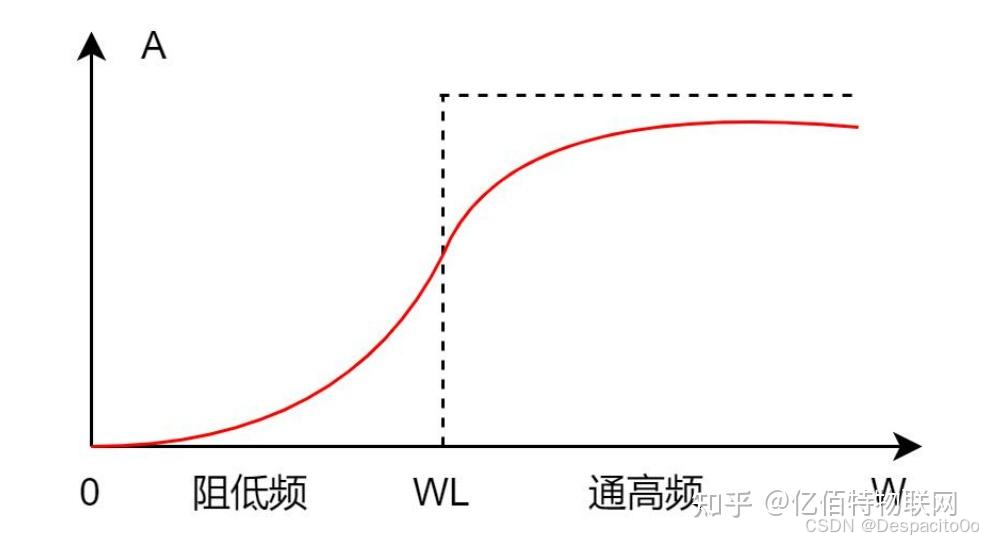
高通滤波步骤:
- 在频谱中心画一个圆形区域(去除区)
- 将圆内的频率成分去除(乘以0),圆外的成分保留(乘以1)
- 进行逆变换,得到图像边缘
# 高通滤波关键代码解析
mask = np.ones((rows, cols), np.uint8) # 创建白色蒙版
mask_area = (x - center[0]) ** 2 + (y - center[1]) ** 2 <= r * r # 圆形区域方程
mask[mask_area] = 0 # 圆内区域置为0
fshift = fshift * mask # 应用蒙版,去除低频,保留高频
💡 处理技巧:先低通滤波去噪,再高通滤波提取边缘,比直接对有噪声的图像进行高通滤波效果更好。这是因为先去噪可以避免噪声被错误地识别为边缘。
4.4 傅里叶逆变换:从频域回到空域
处理完频域信息后,需要通过逆变换将图像转回空域才能显示:
# 逆变换关键步骤
f_ishift = np.fft.ifftshift(fshift) # 将频谱中心移回原位
img_back = np.fft.ifft2(f_ishift) # 二维傅里叶逆变换
img_back = np.abs(img_back) # 取复数的绝对值
⚠️ 注意:由于傅里叶变换结果是复数,所以必须取绝对值才能得到实际可显示的图像。理论上,如果没有对频谱进行修改,逆变换后应该得到完全相同的原始图像,但由于浮点数计算误差,可能存在微小差异。
五、处理效果与结果分析
5.1 频谱图像的解读
频谱图是傅里叶变换结果的可视化表示:
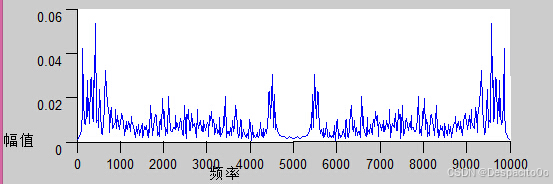
频谱图中:
- 中心亮点:代表图像的平均亮度(DC分量)
- 亮度分布:亮度越高表示该频率成分在图像中的贡献越大
- 距离中心的远近:表示频率的高低,越远频率越高
- 方向信息:反映图像中不同方向的结构特征,例如水平线会在垂直方向上形成亮点
📊 可视化技巧:频谱图的动态范围很大,使用对数变换增强显示效果:
np.log(1 + np.abs(fshift))。不加对数变换,中心亮点会极其明亮,而其他区域几乎看不见。
5.2 低通滤波去噪效果分析
低通滤波后的图像特点:
- ✅ 随机分布的黑白噪声点大幅减少
- ✅ 大面积区域变得平滑
- ❗ 图像边缘可能略有模糊
- ❗ 细节信息可能有所损失
这种效果是低通滤波的典型特征——“去高留低”,即保留图像的基本结构,去除高频变化。
5.3 高通滤波边缘提取效果
高通滤波后的图像特点:
- ✅ 清晰显示图像中的边缘和轮廓
- ✅ 背景区域变为暗色
- ✅ 在去噪后的图像上提取边缘,无噪声干扰
- ❗ 有些微弱的边缘可能被滤除
这种"去低留高"的处理使得图像边缘和细节被突出显示,是形状识别和特征提取的有效手段。
5.4 实际处理效果展示
下面是一个实际处理案例,我们对一张带椒盐噪声的人像照片进行处理:
- 原图:带有明显椒盐噪声的人像照片
- 频谱图:可以看到中心有明亮的低频区域,周围分布着噪声的高频成分
- 低通滤波结果:噪声明显减少,面部轮廓清晰可见
- 高通滤波结果:清晰展示了人脸轮廓和重要特征线条
通过这个例子,我们可以直观感受到频域处理的强大效果。
六、进阶滤波器与优化技巧
6.1 三种常用滤波器比较
除了本文实现的理想滤波器,还有两种常用滤波器:
| 滤波器类型 | 优缺点 | 实现难度 | 适用场景 |
|---|---|---|---|
| 理想滤波器 | 截止锐利,但有明显振铃效应 | 简单 | 演示与教学 |
| 巴特沃斯滤波器 | 平滑过渡,振铃效应较小 | 中等 | 一般图像处理 |
| 高斯滤波器 | 最平滑过渡,几乎无振铃效应 | 中等 | 专业图像处理 |
下面是巴特沃斯低通滤波器的实现代码:
def butterworth_low_pass_filter(fshift, cutoff, order=2):
"""
实现巴特沃斯低通滤波器,提供更平滑的过渡效果
:param fshift: 频移后的频谱
:param cutoff: 截止频率
:param order: 滤波器阶数,阶数越高越接近理想滤波器
:return: 滤波后的频谱
"""
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 创建网格坐标系统
u = np.arange(rows)
v = np.arange(cols)
u, v = np.meshgrid(u - crow, v - ccol, sparse=True)
# 计算每个点到中心的距离
d = np.sqrt(u**2 + v**2)
# 巴特沃斯低通滤波器公式:H(u,v) = 1 / [1 + (D(u,v)/D0)^(2n)]
mask = 1 / (1 + (d / cutoff)**(2*order))
return fshift * mask
高斯低通滤波器的实现代码:
def gaussian_low_pass_filter(fshift, cutoff):
"""
实现高斯低通滤波器,提供最平滑的过渡效果
:param fshift: 频移后的频谱
:param cutoff: 截止频率,决定高斯函数的扩散程度
:return: 滤波后的频谱
"""
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 创建网格坐标系统
u = np.arange(rows)
v = np.arange(cols)
u, v = np.meshgrid(u - crow, v - ccol, sparse=True)
# 计算距中心的距离平方
d_square = u**2 + v**2
# 高斯低通滤波器公式:H(u,v) = e^[-D²(u,v)/(2D0²)]
mask = np.exp(-d_square / (2 * cutoff**2))
return fshift * mask
不同滤波器效果比较:
- 理想滤波器:边界锐利,但会产生"振铃效应"(边缘周围出现波纹状伪影)
- 巴特沃斯滤波器:过渡较为平滑,振铃效应减轻,但计算稍复杂
- 高斯滤波器:最平滑的过渡,几乎没有振铃效应,是专业图像处理首选
6.2 不同噪声类型的处理策略
不同噪声有不同的频域特性,需要不同的处理方法:
| 噪声类型 | 频域特点 | 最佳处理方法 |
|---|---|---|
| 椒盐噪声 | 随机分布的高频点 | 低通滤波或中值滤波 |
| 高斯噪声 | 广泛分布的高频噪声 | 高斯低通滤波 |
| 周期性噪声 | 频谱中特定位置的亮点 | 陷波滤波器(带阻滤波器) |
| 条纹噪声 | 特定方向的线性结构 | 方向性高通滤波器 |
针对条纹噪声的方向性滤波器示例:
def directional_notch_filter(fshift, angle, width):
"""
方向性陷波滤波器,用于去除特定方向的条纹噪声
:param fshift: 频移后的频谱
:param angle: 条纹方向角度(度)
:param width: 滤波带宽
:return: 滤波后的频谱
"""
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 创建掩膜
mask = np.ones((rows, cols), np.float32)
# 将角度转换为弧度
theta = np.deg2rad(angle)
# 创建网格坐标
u, v = np.ogrid[:rows, :cols]
u = u - crow
v = v - ccol
# 计算每个点到中心连线与水平轴的夹角
# 注意:arctan2返回的是[-pi, pi]范围内的角度
angles = np.arctan2(u, v)
# 计算方向性滤波条件(在指定角度附近的点被滤除)
# 需要考虑角度的周期性
width_rad = np.deg2rad(width)
diff = np.minimum(np.abs(angles - theta), np.abs(angles - theta - 2*np.pi))
diff = np.minimum(diff, np.abs(angles - theta + 2*np.pi))
# 在指定方向上创建陷波(去除该方向的频率成分)
mask[diff < width_rad] = 0
return fshift * mask
6.3 解决实际问题的综合策略
在实际应用中,我们可以组合多种滤波器实现更复杂的目标:
- 渐进式滤波:从小半径开始,逐步增大,观察效果变化
- 混合滤波:先用低通滤波去噪,再用陷波滤波去除特定频率干扰
- 自适应滤波:根据图像局部特性自动调整滤波参数
例如,处理扫描文档中的摩尔条纹和噪声的综合方案:
def process_scanned_document(image):
"""
处理扫描文档,去除摩尔条纹和噪声
:param image: 输入灰度图像
:return: 处理后的图像
"""
# 步骤1:傅里叶变换
fshift = perform_fourier_transform(image)
# 步骤2:分析频谱,找出摩尔条纹的主要方向
# (这里简化为已知方向为45度)
# 步骤3:应用方向性陷波滤波器去除摩尔条纹
filtered_fshift = directional_notch_filter(fshift, 45, 5)
# 步骤4:应用高斯低通滤波器去除随机噪声
filtered_fshift = gaussian_low_pass_filter(filtered_fshift, 30)
# 步骤5:逆变换回空域
filtered_image = inverse_fourier_transform(filtered_fshift)
# 步骤6:增强对比度(可选)
filtered_image = cv2.normalize(filtered_image, None, 0, 255, cv2.NORM_MINMAX)
return filtered_image.astype(np.uint8)
6.4 频域与空域滤波器对比
频域滤波和空域滤波(如均值滤波、高斯滤波)各有优缺点:
| 特性 | 频域滤波 | 空域滤波 |
|---|---|---|
| 计算效率 | 大图像更高效 | 小核更高效 |
| 理解难度 | 较抽象 | 直观 |
| 针对性 | 可针对特定频率 | 难以针对特定特征 |
| 全局/局部 | 全局处理 | 局部处理 |
| 应用范围 | 去除特定噪声、频率分析 | 简单去噪、模糊锐化 |
选择合适的方法需要考虑具体问题特点、计算资源和性能要求。
七、实践中的常见问题与解决方案
7.1 如何选择最佳截止频率?
截止频率选择是频域滤波中最关键的参数设置,方法有三:
可视化检查法:
def visualize_cutoff_effects(image, cutoffs=[10, 30, 50, 70]): """ 可视化不同截止频率的效果 :param image: 输入图像 :param cutoffs: 要测试的截止频率列表 :return: 无返回值,直接显示对比结果 """ plt.figure(figsize=(15, 8)) # 原始图像 plt.subplot(2, 3, 1) plt.imshow(image, cmap='gray') plt.title('原始图像') plt.axis('off') # 不同截止频率的效果 for i, cutoff in enumerate(cutoffs): fshift = perform_fourier_transform(image) filtered_fshift = low_pass_filter(fshift, cutoff) filtered_image = inverse_fourier_transform(filtered_fshift) plt.subplot(2, 3, i+2) plt.imshow(filtered_image, cmap='gray') plt.title(f'截止频率 = {cutoff}') plt.axis('off') plt.tight_layout() plt.show()自适应计算法:根据图像能量分布自动计算
def adaptive_cutoff(fshift, energy_percent=0.90): """ 自适应计算截止频率,保留指定百分比的能量 :param fshift: 频移后的频谱 :param energy_percent: 要保留的能量百分比(0-1) :return: 计算出的截止频率 """ # 获取频谱中心点 rows, cols = fshift.shape crow, ccol = rows // 2, cols // 2 # 计算频谱能量 magnitude = np.abs(fshift) total_energy = np.sum(magnitude) # 从中心开始,计算累积能量 max_radius = min(rows, cols) // 2 cutoff = 1 for r in range(1, max_radius): # 创建圆形掩膜 y, x = np.ogrid[-crow:rows-crow, -ccol:cols-ccol] mask_area = x*x + y*y <= r*r # 计算圆内能量 circle_energy = np.sum(magnitude[mask_area]) energy_ratio = circle_energy / total_energy # 如果达到目标能量比例,返回当前半径 if energy_ratio >= energy_percent: cutoff = r break return cutoff质量评估法:计算信噪比或结构相似性指标
def evaluate_quality(original, filtered): """ 评估滤波结果质量 :param original: 原始图像 :param filtered: 滤波后图像 :return: PSNR值(峰值信噪比) """ # 确保图像类型一致 original = original.astype(np.float32) filtered = filtered.astype(np.float32) # 计算PSNR mse = np.mean((original - filtered) ** 2) if mse == 0: psnr = 100 else: psnr = 20 * np.log10(255.0 / np.sqrt(mse)) # 如果需要计算SSIM,需要导入skimage # from skimage.metrics import structural_similarity as ssim # ssim_value = ssim(original, filtered) return psnr # 返回PSNR值
💡 实用建议:对于新接触的图像类型,先尝试截止频率为图像最小边长的10%作为起点,然后根据效果调整。较好的方法是先用几个不同的截止频率进行测试,选择最佳效果。
7.2 如何解决振铃效应问题?
振铃效应是理想滤波器常见的副作用,表现为图像边缘周围出现波纹状伪影:
解决方法:
- 使用高斯滤波器:最有效的方法,过渡更平滑
- 增大截止频率:减小过滤强度,可减轻但不能完全消除
- 边缘延拓:处理前扩展图像边界,处理后裁剪回原始大小
高斯滤波器实现代码在6.1节已给出,这里不再重复。
边缘延拓方法示例:
def process_with_edge_extension(image, cutoff):
"""
使用边缘延拓方法减轻振铃效应
:param image: 输入图像
:param cutoff: 截止频率
:return: 处理后的图像
"""
# 步骤1:使用镜像方式扩展图像边界(减少边缘不连续性)
rows, cols = image.shape
extended_image = cv2.copyMakeBorder(image, rows//2, rows//2,
cols//2, cols//2,
cv2.BORDER_REFLECT)
# 步骤2:对扩展后的图像进行傅里叶变换
fshift = perform_fourier_transform(extended_image)
# 步骤3:应用低通滤波器
filtered_fshift = low_pass_filter(fshift, cutoff)
# 步骤4:逆变换回空域
filtered_extended = inverse_fourier_transform(filtered_fshift)
# 步骤5:裁剪回原始尺寸
result = filtered_extended[rows//2:rows//2+rows,
cols//2:cols//2+cols]
return result
🔍 技术解析:边缘延拓通过减少图像边缘的不连续性,有效降低了振铃效应。这是因为振铃效应主要产生于信号的不连续点处,扩展使得图像边缘过渡更加平滑。
7.3 特殊图像的频域处理技巧
7.3.1 医学图像处理
医学影像(如CT、MRI)有其特殊性,需要特别小心处理:
def enhance_medical_image(image):
"""
医学图像频域增强处理
:param image: 输入医学图像
:return: 增强后的图像
"""
# 步骤1:进行傅里叶变换
fshift = perform_fourier_transform(image)
# 步骤2:保存原始图像用于比较
original_mag = np.log(1 + np.abs(fshift))
# 步骤3:高频提升滤波(增强边缘但保留低频信息)
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 创建高频提升滤波器掩膜
x, y = np.ogrid[:rows, :cols]
d_square = ((x - crow) ** 2 + (y - ccol) ** 2).astype(np.float32)
# 高频提升滤波器: H(u,v) = a + b·[1 - e^(-c·D²(u,v))]
# 其中a控制低频增益,b控制高频增益,c控制截止频率
a, b, c = 0.9, 0.1, 0.0025
mask = a + b * (1 - np.exp(-c * d_square))
# 应用滤波器
filtered_fshift = fshift * mask
# 步骤4:逆变换
enhanced_image = inverse_fourier_transform(filtered_fshift)
# 步骤5:归一化处理,增强对比度
enhanced_image = cv2.normalize(enhanced_image, None, 0, 255, cv2.NORM_MINMAX)
return enhanced_image.astype(np.uint8)
🏥 医学影像处理要点:
- 保留关键诊断信息是首要原则
- 高频提升滤波既能增强边缘(如肿瘤边界),又不会完全丢失低频信息
- 处理前务必咨询医学专家,确定需要增强的特征
7.3.2 卫星遥感图像去条纹
卫星图像常见的条纹噪声可通过定向滤波器去除:
def remove_satellite_stripes(image):
"""
去除卫星图像中的周期性条纹噪声
:param image: 输入卫星图像
:return: 去条纹后的图像
"""
# 步骤1:傅里叶变换
fshift = perform_fourier_transform(image)
# 步骤2:分析频谱,找出条纹特征点
# 这里假设已知条纹在水平方向(0度)
magnitude_spectrum = np.log(1 + np.abs(fshift))
# 步骤3:应用陷波滤波器去除条纹
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 定义垂直带阻滤波器(去除水平条纹)
mask = np.ones((rows, cols), np.float32)
# 带宽参数
width = 5
# 在垂直方向上创建带阻区域(去除水平条纹)
for i in range(rows):
for j in range(cols):
# 计算与垂直线的距离
dist_from_vertical = abs(j - ccol)
# 如果在带阻区域内,则设为0
if dist_from_vertical < width and i != crow:
mask[i, j] = 0
# 应用滤波器
filtered_fshift = fshift * mask
# 步骤4:逆变换
filtered_image = inverse_fourier_transform(filtered_fshift)
return filtered_image
🛰️ 卫星图像处理提示:
- 实际应用中,通常需要分析频谱图找出条纹噪声的具体位置
- 通过计算频谱图的行和列平均值,可快速定位噪声点
- 对于复杂条纹,可能需要设计多个方向的陷波滤波器
7.4 优化处理性能的方法
随着图像分辨率的提高,性能优化变得越来越重要:
7.4.1 FFT计算优化
def optimized_fft(image):
"""
优化的FFT计算
:param image: 输入图像
:return: 频谱
"""
# 步骤1:调整图像大小为2的幂次,加速FFT计算
# FFT算法在图像尺寸为2的幂次时性能最佳
h, w = image.shape
optimal_h = 2**int(np.ceil(np.log2(h)))
optimal_w = 2**int(np.ceil(np.log2(w)))
# 步骤2:用零填充扩展图像到最优尺寸
padded_img = np.zeros((optimal_h, optimal_w), dtype=np.float32)
padded_img[:h, :w] = image
# 步骤3:使用numpy的FFT计算(底层使用FFTPACK或MKL)
f = np.fft.fft2(padded_img)
fshift = np.fft.fftshift(f)
return fshift, (h, w)
7.4.2 并行处理大型图像
对于大型图像,可以采用分块处理策略:
def parallel_frequency_filter(image, cutoff, filter_type='low', block_size=512):
"""
并行分块频域滤波处理
:param image: 输入图像
:param cutoff: 截止频率
:param filter_type: 滤波器类型 ('low'或'high')
:param block_size: 处理块大小
:return: 处理后的图像
"""
# 获取图像尺寸
height, width = image.shape
# 创建结果图像
result = np.zeros_like(image, dtype=np.float32)
# 确定分块数
num_blocks_h = int(np.ceil(height / block_size))
num_blocks_w = int(np.ceil(width / block_size))
# 使用重叠策略避免边界问题
overlap = 32 # 重叠像素数
# 定义处理单个块的函数
def process_block(block, cutoff, filter_type):
fshift = perform_fourier_transform(block)
if filter_type == 'low':
filtered_fshift = low_pass_filter(fshift, cutoff)
else:
filtered_fshift = high_pass_filter(fshift, cutoff)
return inverse_fourier_transform(filtered_fshift)
# 分块处理
for i in range(num_blocks_h):
for j in range(num_blocks_w):
# 计算当前块的范围(带重叠)
start_h = max(0, i * block_size - overlap)
end_h = min(height, (i + 1) * block_size + overlap)
start_w = max(0, j * block_size - overlap)
end_w = min(width, (j + 1) * block_size + overlap)
# 提取当前块
block = image[start_h:end_h, start_w:end_w]
# 处理当前块
processed_block = process_block(block, cutoff, filter_type)
# 计算有效区域(去除重叠部分)
valid_start_h = max(0, i * block_size)
valid_end_h = min(height, (i + 1) * block_size)
valid_start_w = max(0, j * block_size)
valid_end_w = min(width, (j + 1) * block_size)
# 计算有效区域在处理块中的位置
block_valid_start_h = valid_start_h - start_h
block_valid_end_h = block_valid_start_h + (valid_end_h - valid_start_h)
block_valid_start_w = valid_start_w - start_w
block_valid_end_w = block_valid_start_w + (valid_end_w - valid_start_w)
# 将处理结果写入结果图像
result[valid_start_h:valid_end_h, valid_start_w:valid_end_w] = \
processed_block[block_valid_start_h:block_valid_end_h,
block_valid_start_w:block_valid_end_w]
return result
💻 性能优化小贴士:
- 使用numpy的FFT实现通常比手写实现快10-100倍
- 对于超大图像(>4K分辨率),分块处理可以有效避免内存溢出
- 如追求极致性能,可考虑使用GPU加速库如CuPy或OpenCV的GPU模块
八、高级应用场景与案例解析
8.1 图像压缩的频域实现
JPEG压缩的核心原理就是利用傅里叶变换的特性丢弃高频信息:
def simple_frequency_compression(image, quality=50):
"""
基于频域的简易图像压缩(模拟JPEG原理)
:param image: 输入灰度图像
:param quality: 质量参数(0-100),值越小压缩率越高
:return: 压缩后的图像
"""
# 步骤1:将图像分成8x8的块
h, w = image.shape
block_size = 8
compressed_image = np.zeros_like(image, dtype=np.float32)
# 步骤2:保留系数比例(质量参数决定)
# 质量越低,保留的系数越少
keep_ratio = quality / 100.0
# 步骤3:对每个8x8块进行DCT变换并压缩
for i in range(0, h, block_size):
for j in range(0, w, block_size):
# 提取当前块
block = image[i:min(i+block_size, h), j:min(j+block_size, w)].copy()
# 若块大小不足8x8,用0填充
if block.shape[0] < block_size or block.shape[1] < block_size:
temp_block = np.zeros((block_size, block_size), dtype=np.float32)
temp_block[:block.shape[0], :block.shape[1]] = block
block = temp_block
# 执行DCT变换(离散余弦变换,是傅里叶变换的一种变体)
dct_block = cv2.dct(block.astype(np.float32))
# 通过阈值化实现压缩(保留较大系数)
threshold = np.max(np.abs(dct_block)) * (1 - keep_ratio)
dct_block[np.abs(dct_block) < threshold] = 0
# 执行IDCT变换(逆变换)
idct_block = cv2.idct(dct_block)
# 将结果写回原图像
compressed_image[i:min(i+block_size, h), j:min(j+block_size, w)] = \
idct_block[:min(i+block_size, h)-i, :min(j+block_size, w)-j]
return compressed_image
🗜️ 图像压缩原理:
- JPEG压缩的本质是丢弃人眼不敏感的高频信息
- DCT变换(离散余弦变换)是傅里叶变换的一种特殊形式,更适合图像压缩
- 图像质量和文件大小可通过保留系数的多少来调节
8.2 水印添加与检测
频域水印是一种隐蔽性好、抗攻击能力强的数字水印技术:
def add_frequency_watermark(image, watermark_text="版权所有"):
"""
在图像频域添加水印
:param image: 输入图像
:param watermark_text: 水印文本
:return: 添加水印后的图像
"""
# 步骤1:将图像转换到频域
fshift = perform_fourier_transform(image)
# 步骤2:生成水印(这里简化为在频域中心区域添加简单模式)
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 水印强度(较小的值使水印不可见但可检测)
alpha = 0.1
# 在频谱的中频区域添加水印模式
for i in range(len(watermark_text)):
char_value = ord(watermark_text[i])
# 对每个字符,在不同位置添加标记
angle = 2 * np.pi * i / len(watermark_text)
radius = 50 # 距中心的距离
x = int(crow + radius * np.cos(angle))
y = int(ccol + radius * np.sin(angle))
# 修改幅值,添加水印信息
fshift[x, y] = fshift[x, y] * (1 + alpha * char_value)
# 步骤3:逆变换回空域
watermarked_image = inverse_fourier_transform(fshift)
return watermarked_image
检测水印的函数:
def detect_frequency_watermark(image, watermark_text="版权所有"):
"""
检测图像中的频域水印
:param image: 待检测图像
:param watermark_text: 预期水印文本
:return: 检测结果(True/False)和置信度
"""
# 步骤1:将图像转换到频域
fshift = perform_fourier_transform(image)
# 步骤2:检查水印位置的频谱特征
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
# 用于存储检测到的字符值
detected_chars = []
# 检测水印
for i in range(len(watermark_text)):
angle = 2 * np.pi * i / len(watermark_text)
radius = 50
x = int(crow + radius * np.cos(angle))
y = int(ccol + radius * np.sin(angle))
# 提取当前位置的幅值
magnitude = np.abs(fshift[x, y])
# 检查周围区域的平均幅值
nearby_points = []
for dx in range(-2, 3):
for dy in range(-2, 3):
if dx == 0 and dy == 0:
continue
nearby_points.append(np.abs(fshift[x+dx, y+dy]))
avg_magnitude = np.mean(nearby_points)
# 根据幅值差异估计嵌入的字符值
alpha = 0.1 # 与添加时相同的强度
estimated_char_value = int((magnitude / avg_magnitude - 1) / alpha)
detected_chars.append(estimated_char_value)
# 步骤3:比较检测到的字符与预期水印
expected_chars = [ord(c) for c in watermark_text]
# 计算置信度(字符值的相似度)
confidence = np.mean([1 - min(abs(d - e) / 255, 1) for d, e in zip(detected_chars, expected_chars)])
# 判断是否检测到水印(置信度阈值可调)
is_detected = confidence > 0.7
return is_detected, confidence
🔐 频域水印特点:
- 不可见性:频域水印对图像视觉质量影响极小
- 鲁棒性:即使图像经过剪裁、压缩等处理,频域水印仍可能被检测
- 适用场景:版权保护、防伪溯源、隐写术等
8.3 基于频谱分析的图像分类
频谱特征可用于图像分类和识别:
def extract_frequency_features(image):
"""
提取图像的频域特征用于分类
:param image: 输入灰度图像
:return: 频域特征向量
"""
# 步骤1:预处理(标准化尺寸和亮度)
image = cv2.resize(image, (256, 256))
image = cv2.normalize(image, None, 0, 255, cv2.NORM_MINMAX)
# 步骤2:傅里叶变换
fshift = perform_fourier_transform(image)
magnitude = np.abs(fshift)
# 步骤3:提取环形频谱特征
features = []
rows, cols = magnitude.shape
crow, ccol = rows // 2, cols // 2
# 定义多个环形区域,计算每个环上的能量
# 这些环对应不同频率范围的能量分布
ring_radii = [5, 10, 20, 30, 50, 70, 100]
for i in range(len(ring_radii)):
inner_radius = ring_radii[i-1] if i > 0 else 0
outer_radius = ring_radii[i]
# 创建环形掩膜
y, x = np.ogrid[-crow:rows-crow, -ccol:cols-ccol]
ring_mask = (x*x + y*y >= inner_radius**2) & (x*x + y*y < outer_radius**2)
# 计算环内能量
ring_energy = np.sum(magnitude[ring_mask])
features.append(ring_energy)
# 步骤4:提取方向性特征(检测是否存在特定方向的结构)
num_directions = 8
direction_features = []
for d in range(num_directions):
angle = d * np.pi / num_directions
direction_mask = np.zeros_like(magnitude, dtype=bool)
# 创建扇形区域
for r in range(1, min(rows, cols)//2):
for theta in np.linspace(angle-0.2, angle+0.2, 20):
x = int(ccol + r * np.cos(theta))
y = int(crow + r * np.sin(theta))
if 0 <= x < cols and 0 <= y < rows:
direction_mask[y, x] = True
# 计算该方向上的能量
direction_energy = np.sum(magnitude[direction_mask])
direction_features.append(direction_energy)
# 合并所有特征
all_features = features + direction_features
# 步骤5:归一化特征向量
all_features = np.array(all_features)
all_features = all_features / np.sum(all_features)
return all_features
📊 频域特征分类应用:
- 纹理分类:不同纹理在频域有明显不同的能量分布
- 自然场景识别:自然场景和人造场景在频谱特征上差异明显
- 文档分类:文本、图表、照片等在频域特征上各不相同
九、总结与进阶路径
9.1 本文要点回顾
通过本文的学习,我们掌握了:
- 傅里叶变换的基本原理:将图像从空间域转换到频率域
- 频域滤波的核心思想:在频域中选择性地保留或去除特定频率成分
- 实战技能:
- 低通滤波去除椒盐噪声
- 高通滤波提取图像边缘
- 不同类型滤波器的选择与应用
- 进阶应用:
- 特殊图像的处理技巧
- 性能优化方法
- 频域水印、压缩等实际应用
9.2 学习路径与进阶建议
如果你想在图像处理领域更进一步,推荐以下学习路径:
基础原理深化:
- 学习连续傅里叶变换和离散傅里叶变换的数学原理
- 掌握小波变换(Wavelet Transform)等更先进的变换方法
工具与库:
- 熟练使用OpenCV的更多频域处理功能
- 了解Scikit-image中的高级滤波算法
- 探索GPU加速库如CuPy等
应用领域扩展:
- 医学图像分析
- 计算机视觉中的目标检测与识别
- 深度学习中的频域特征提取
🔗 推荐学习资源:
- 《数字图像处理》- 冈萨雷斯(Gonzalez)著
- OpenCV官方教程: https://docs.opencv.org/
- 斯坦福大学CS131课程: Computer Vision
9.3 代码复用与实践建议
为了方便大家在实际项目中应用本文的代码,我将核心功能封装为一个简单的类:
class FrequencyImageProcessor:
"""
频域图像处理工具类
"""
def __init__(self):
pass
@staticmethod
def fft(image):
"""执行二维傅里叶变换"""
f = np.fft.fft2(image)
fshift = np.fft.fftshift(f)
return fshift
@staticmethod
def ifft(fshift):
"""执行傅里叶逆变换"""
f_ishift = np.fft.ifftshift(fshift)
img_back = np.fft.ifft2(f_ishift)
img_back = np.abs(img_back)
return img_back
@staticmethod
def ideal_low_pass(fshift, cutoff):
"""理想低通滤波器"""
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
mask = np.zeros((rows, cols), np.uint8)
y, x = np.ogrid[-crow:rows-crow, -ccol:cols-ccol]
mask_area = x**2 + y**2 <= cutoff**2
mask[mask_area] = 1
return fshift * mask
@staticmethod
def ideal_high_pass(fshift, cutoff):
"""理想高通滤波器"""
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
mask = np.ones((rows, cols), np.uint8)
y, x = np.ogrid[-crow:rows-crow, -ccol:cols-ccol]
mask_area = x**2 + y**2 <= cutoff**2
mask[mask_area] = 0
return fshift * mask
@staticmethod
def gaussian_low_pass(fshift, cutoff):
"""高斯低通滤波器"""
rows, cols = fshift.shape
crow, ccol = rows // 2, cols // 2
y, x = np.ogrid[-crow:rows-crow, -ccol:cols-ccol]
d_square = x**2 + y**2
mask = np.exp(-d_square / (2 * cutoff**2))
return fshift * mask
def remove_noise(self, image, cutoff=30, filter_type='gaussian'):
"""
去除图像噪声
:param image: 输入图像
:param cutoff: 截止频率
:param filter_type: 滤波器类型 ('ideal'或'gaussian')
:return: 去噪后的图像
"""
fshift = self.fft(image)
if filter_type == 'ideal':
filtered_fshift = self.ideal_low_pass(fshift, cutoff)
else:
filtered_fshift = self.gaussian_low_pass(fshift, cutoff)
return self.ifft(filtered_fshift)
def extract_edges(self, image, cutoff=10):
"""
提取图像边缘
:param image: 输入图像
:param cutoff: 截止频率
:return: 边缘图像
"""
fshift = self.fft(image)
filtered_fshift = self.ideal_high_pass(fshift, cutoff)
return self.ifft(filtered_fshift)
def visualize_spectrum(self, image):
"""
可视化图像频谱
:param image: 输入图像
:return: 频谱图像
"""
fshift = self.fft(image)
magnitude_spectrum = np.log(1 + np.abs(fshift))
# 归一化到0-255范围
magnitude_spectrum = cv2.normalize(magnitude_spectrum, None, 0, 255, cv2.NORM_MINMAX)
return magnitude_spectrum.astype(np.uint8)
使用示例:
# 使用示例
if __name__ == "__main__":
# 读取图像
image_path = "noise_image.png"
image = cv2.imread(image_path, 0) # 以灰度模式读取
# 创建处理器实例
processor = FrequencyImageProcessor()
# 去除噪声
denoised = processor.remove_noise(image, cutoff=30, filter_type='gaussian')
# 提取边缘
edges = processor.extract_edges(denoised, cutoff=10)
# 可视化频谱
spectrum = processor.visualize_spectrum(image)
# 显示结果
plt.figure(figsize=(12, 8))
plt.subplot(221), plt.imshow(image, cmap='gray')
plt.title('原始噪声图像'), plt.xticks([]), plt.yticks([])
plt.subplot(222), plt.imshow(spectrum, cmap='gray')
plt.title('频谱图'), plt.xticks([]), plt.yticks([])
plt.subplot(223), plt.imshow(denoised, cmap='gray')
plt.title('去噪后图像'), plt.xticks([]), plt.yticks([])
plt.subplot(224), plt.imshow(edges, cmap='gray')
plt.title('边缘图像'), plt.xticks([]), plt.yticks([])
plt.tight_layout()
plt.show()
📝 实践建议:
- 从简单图像开始实验,逐步过渡到复杂图像
- 保存中间结果,便于比较不同参数的效果
- 尝试不同截止频率,找到最适合当前图像的参数
- 记录处理前后的图像差异,培养对频域处理的直觉
9.4 结语
傅里叶变换是图像处理中的基础且强大的工具,它让我们能以全新的视角观察和处理图像。无论是初学者还是专业人士,掌握频域处理技术都能让你的图像处理能力更上一层楼。
希望本文对你学习图像处理有所帮助!如有疑问或建议,欢迎在评论区留言讨论。祝你的图像处理之旅愉快而充实!
🎁 福利时间! 我已将本文所有代码整理成一个完整的Python包,包含更多实用功能和详细注释,欢迎在评论区留言获取下载链接!