一、感知机
对于分类问题,我们设定一个映射,将x通过函数f(x)映射到y
1. 感知机的基本结构
感知机(Perceptron)是最早期的神经网络模型,由 Rosenblatt 在 1958 年提出,是现代神经网络和深度学习模型的雏形。
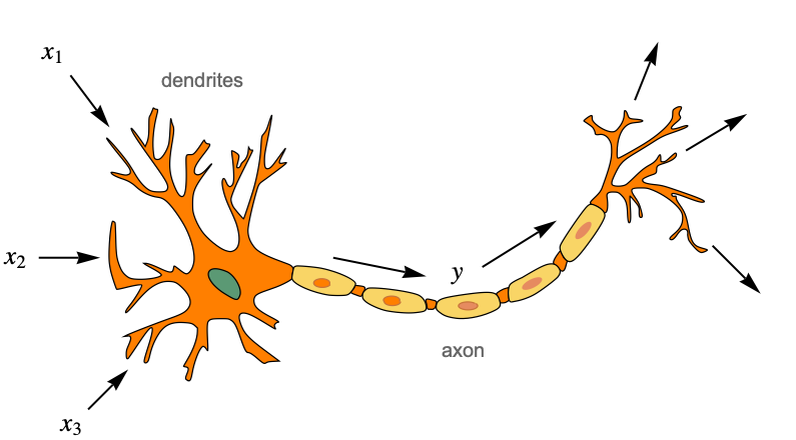
其模拟的是人脑内的神经元。神经元会接受到一些信号(我们给到模型的输入),之后神经元会决定是否激活这个信号,如果需要激活,就会产生一些神经冲动(Nerve Impulses),将信息传播到下一个链接。从而完成了信息端到端的传递。
在深度学习中,其定义如下
基本结构如下:
- 输入向量 x = [ x 1 , x 2 , . . . , x d ] \mathbf{x} = [x_1, x_2, ..., x_d] x=[x1,x2,...,xd]
- 权重向量 w = [ w 1 , w 2 , . . . , w d ] \mathbf{w} = [w_1, w_2, ..., w_d] w=[w1,w2,...,wd]
- 偏置项 b b b
- 输出函数: o = sign ( w ⊤ x + b ) o = \text{sign}(\mathbf{w}^\top \mathbf{x} + b) o=sign(w⊤x+b)
sign ( s ) = { + 1 , s ≥ 0 − 1 , s < 0 \text{sign}(s) = \begin{cases} +1, & s \geq 0 \\\\ -1, & s < 0 \end{cases} sign(s)=⎩ ⎨ ⎧+1,−1,s≥0s<0
这是一个线性分类器,决策边界是一个超平面。
2. 感知机的数学定义与决策规则
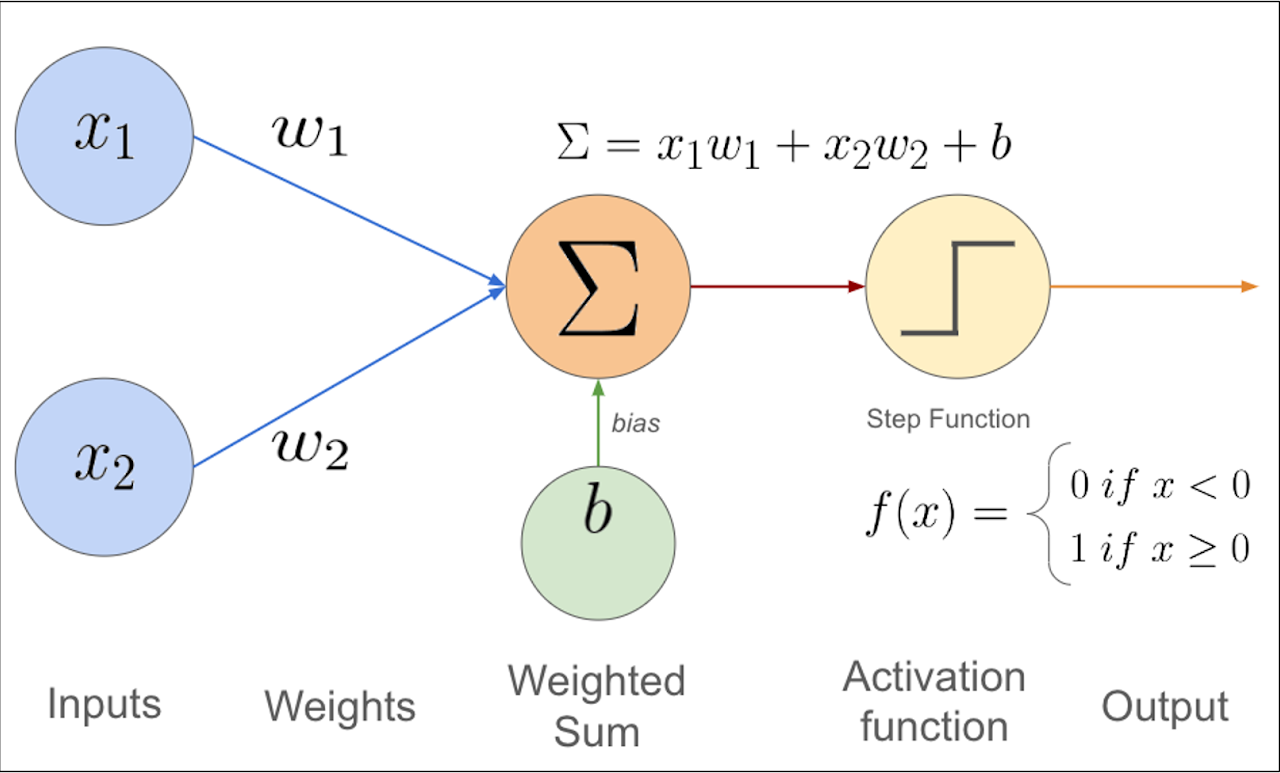
感知机的核心是对输入的加权求和,并加上一个偏置项 b b b,用于输出一个实值:
y ^ = ∑ i = 1 d w i x i + b = w ⊤ x + b \hat{y} = \sum_{i=1}^{d} w_i x_i + b = \mathbf{w}^\top \mathbf{x} + b y^=i=1∑dwixi+b=w⊤x+b
其中:
- y ^ \hat{y} y^:神经元对期望输出的估计(输出值)
- w \mathbf{w} w:权重向量(weight vector)
- x \mathbf{x} x:输入向量(input vector)
- b b b:偏置项(bias)
决策规则(Decision Rule)
感知机的最终分类结果是通过符号函数决定的:
o = sign ( y ^ ) = { + 1 , y ^ ≥ 0 − 1 , y ^ < 0 o = \text{sign}(\hat{y}) = \begin{cases} +1, & \hat{y} \geq 0 \\\\ -1, & \hat{y} < 0 \end{cases} o=sign(y^)=⎩ ⎨ ⎧+1,−1,y^≥0y^<0
这个函数将连续输出 y ^ \hat{y} y^ 映射到离散类别 { + 1 , − 1 } \{+1, -1\} {+1,−1}。
分类条件判断
感知机判断一个样本是否被正确分类,依据如下公式:
- 如果样本分类正确,则:
y ( w ⊤ x + b ) ≥ 0 y(\mathbf{w}^\top \mathbf{x} + b) \geq 0 y(w⊤x+b)≥0
- 否则(分类错误):
y ( w ⊤ x + b ) < 0 y(\mathbf{w}^\top \mathbf{x} + b) < 0 y(w⊤x+b)<0
这里的 y y y 是样本的真实标签(取值为 +1 或 -1)。这个不等式体现了分类面的位置是否与样本标签方向一致。
对于一个训练样本 ( x i , y i ) (\mathbf{x}_i, y_i) (xi,yi):
- 如果分类正确: y i ( w ⊤ x i + b ) ≥ 0 y_i(\mathbf{w}^\top \mathbf{x}_i + b) \geq 0 yi(w⊤xi+b)≥0
- 否则分类错误。
直观理解:
y 表示 ground truth 真实标签
( w ⊤ x i + b ) (\mathbf{w}^\top \mathbf{x}_i + b) (w⊤xi+b) 表示 y ^ \hat{y} y^ 即模型预测标签
而sign函数,把预测值分为了两个:+1,-1
因此预测正确的情况有两种:(+1, +1) 或者 (-1, -1) 这两种情况二者的乘积都是 >0
预测错误的情况: (+1, -1) 或者 (-1, +1) 这两种情况的乘积 < 0
感知机的损失函数仅考虑错误分类的样本:
m i n L ( w , b ) = − ∑ i ∈ M y i ( w ⊤ x i + b ) min L(\mathbf{w}, b) = -\sum_{i \in \mathcal{M}} y_i (\mathbf{w}^\top \mathbf{x}_i + b) minL(w,b)=−i∈M∑yi(w⊤xi+b)
其中 M \mathcal{M} M 是错误分类样本的集合。
为什么有个负号? 按照原始的公式定义, ∑ i ∈ M y i ( w ⊤ x i + b ) \sum_{i \in \mathcal{M}} y_i (\mathbf{w}^\top \mathbf{x}_i + b) ∑i∈Myi(w⊤xi+b) 的最大值才是我们的优化目标。
此时的乘积是一种分类边界距离的粗略估计,但并不适用于衡量回归或概率分布的“误差大小”。 (因此不能用误差大小的思路来想。)
说回负号,在机器学习中,我们习惯用**最小化(minimization)**问题来构造损失函数,也方便求导。
优化器SGD、Adam等是梯度下降,适配最小化的loss函数
3. 优化算法:梯度下降
通过求偏导得到:
- 权重更新: ∇ w L = − ∑ i ∈ M y i x i \nabla_\mathbf{w} L = - \sum_{i \in \mathcal{M}} y_i \mathbf{x}_i ∇wL=−∑i∈Myixi
- 偏置更新: ∇ b L = − ∑ i ∈ M y i \nabla_b L = - \sum_{i \in \mathcal{M}} y_i ∇bL=−∑i∈Myi
偏导后得到的是梯度,同时包含“变化的方向”与“变化的速率”
每次迭代更新:
w ← w + η y i x i , b ← b + η y i \mathbf{w} \leftarrow \mathbf{w} + \eta y_i \mathbf{x}_i, \quad b \leftarrow b + \eta y_i w←w+ηyixi,b←b+ηyi
具体而言 ∇ w L = − ∑ i ∈ M y i x i \nabla_\mathbf{w} L = - \sum_{i \in \mathcal{M}} y_i \mathbf{x}_i ∇wL=−∑i∈Myixi 告诉我们:朝着这个方向,损失上升最快
所以我们应该:
w ← w − η ∇ w L \mathbf{w} \leftarrow \mathbf{w} - \eta \nabla_\mathbf{w}L w←w−η∇wL
来减小损失
4. 激活函数:Sign 函数
g ( x ) = sign ( w ⊤ x + b ) g(\mathbf{x}) = \text{sign}(\mathbf{w}^\top \mathbf{x} + b) g(x)=sign(w⊤x+b)
定义如下:
sign ( s ) = { + 1 , s ≥ 0 − 1 , s < 0 \text{sign}(s) = \begin{cases} +1, & s \geq 0 \\\\ -1, & s < 0 \end{cases} sign(s)=⎩ ⎨ ⎧+1,−1,s≥0s<0
5. 感知机的局限性
- 感知机无法处理非线性可分问题。
- 经典反例:XOR 任务。
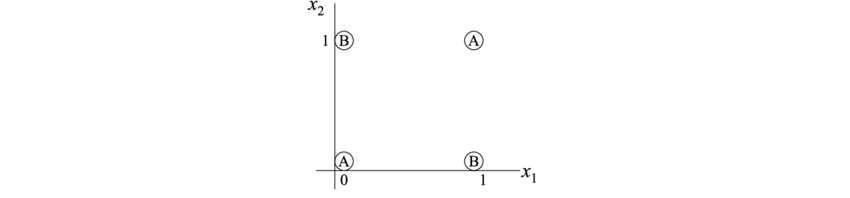
| x1 | x2 | y (XOR) |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
线性模型无法分割这两类。
6. AI 寒冬与转折点
- Minsky 与 Papert 在《Perceptrons》中指出感知机的局限,引发“AI寒冬”。
二、多层感知机(MLP)与非线性建模
1. 多层网络结构
1986年,Hinton 等人提出反向传播算法(Backpropagation):
- 支持隐藏层训练
- 支持非线性组合
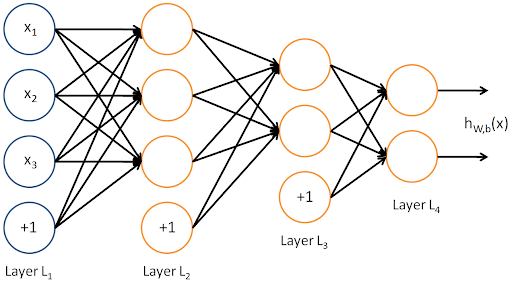
组成: 输入层 → 隐藏层 → 输出层
2. 网络表示为函数复合
y = f ( L ) ( … f ( 2 ) ( f ( 1 ) ( x ) ) ) y = f^{(L)}(\dots f^{(2)}(f^{(1)}(x))) y=f(L)(…f(2)(f(1)(x)))
对应结构是一个有向无环图(DAG),每层将上一层的输出作为输入。
3. 非线性激活函数
激活函数必须非线性,否则多层仍等效于单层。
常见激活函数:
Sigmoid: f ( s ) = 1 1 + e − s f(s) = \frac{1}{1 + e^{-s}} f(s)=1+e−s1
Tanh: f ( s ) = e s − e − s e s + e − s f(s) = \frac{e^s - e^{-s}}{e^s + e^{-s}} f(s)=es+e−ses−e−s
ReLU: f ( s ) = max ( 0 , s ) f(s) = \max(0, s) f(s)=max(0,s)
Leaky ReLU:
f ( s ) = { s , s ≥ 0 α s , s < 0 f(s) = \begin{cases} s, & s \geq 0 \\\\ \alpha s, & s < 0 \end{cases} f(s)=⎩ ⎨ ⎧s,αs,s≥0s<0GELU: 使用高斯误差函数的平滑激活
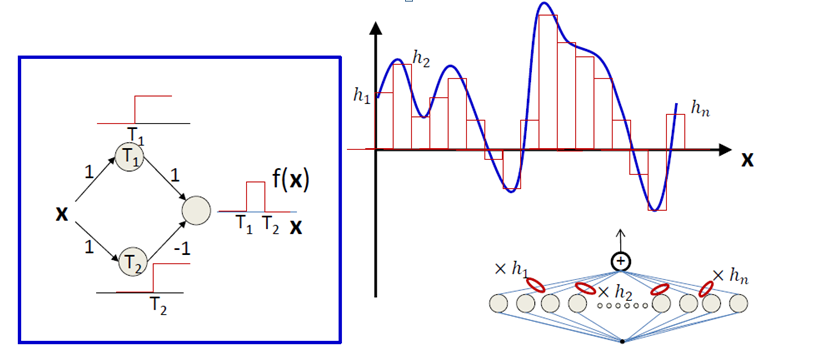
4. 通用逼近定理(Universal Approximation Theorem)
通用逼近定理是神经网络理论的核心之一。它说明:
只要一个前馈神经网络具有单隐藏层,且隐藏单元数量足够多,它就能以任意精度逼近任何连续函数。
数学表述
设激活函数 f ( ⋅ ) f(\cdot) f(⋅) 是一个非常数、有界、单调递增的连续函数。
定义 I m = [ 0 , 1 ] m I_m = [0,1]^m Im=[0,1]m 表示 m m m 维单位超立方体, C ( I m ) C(I_m) C(Im) 表示定义在 I m I_m Im 上的所有连续函数的集合。
则对于任意 ε > 0 \varepsilon > 0 ε>0 和任意函数 F ∈ C ( I m ) F \in C(I_m) F∈C(Im),总存在整数 N N N、实数 v i , b i ∈ R v_i, b_i \in \mathbb{R} vi,bi∈R 和向量 w i ∈ R m \mathbf{w}_i \in \mathbb{R}^m wi∈Rm,使得:
F ^ ( x ) = ∑ i = 1 N v i f ( w i ⊤ x + b i ) \hat{F}(x) = \sum_{i=1}^{N} v_i f(\mathbf{w}_i^\top \mathbf{x} + b_i) F^(x)=i=1∑Nvif(wi⊤x+bi)
满足:
∣ F ^ ( x ) − F ( x ) ∣ < ε , ∀ x ∈ I m \left| \hat{F}(x) - F(x) \right| < \varepsilon, \quad \forall x \in I_m F^(x)−F(x) <ε,∀x∈Im
即函数 F ^ ( x ) \hat{F}(x) F^(x) 可以任意逼近 F ( x ) F(x) F(x)。
直观解释
- 神经网络可以通过一个隐藏层 + 足够多的神经元来逼近任何连续函数
- 每个隐藏神经元做一个线性变换 + 激活函数(如 Sigmoid 或 Tanh)
- 输出层再对它们加权求和,实现对复杂函数的拟合
实际意义
| 项目 | 说明 |
|---|---|
| 所需层数 | 仅需单隐藏层(前馈) |
| 所需神经元 | 足够多即可,不一定很深 |
| 所逼近的函数 | 任何连续函数(理论上) |
| 激活函数要求 | 非常数、有界、单调递增、连续 |
引用
Universality Theorem (Hecht-Nielsen, 1989):
“Neural networks with a single hidden layer can be used to approximate any continuous function to any desired precision.”
5. 可视化解释(单输入 → 单输出)
- 增加权重 → 激活函数更陡峭
- 改变偏置 → 平移激活区域(会移动图形,但不会改变图形的形状。)
- 组合多个隐藏神经元 → 构造阶跃、凸包、塔型结构等更复杂函数
在二维输入时,通过构建多个线性超平面与组合,网络可以学习更复杂的输入空间划分。
6. 激活函数的作用与常见形式
激活函数是神经元中引入非线性的关键部分,它决定了每个神经元的响应形式。
必须是非线性的:否则就等同于线性分类器
几乎处处连续且可微 ; 单调性:否则会在误差面引入额外的局部极值
比如 sin 函数就不可以作为激活函数,因为有多个局部极值,不符合单调性。
激活函数的基本结构
一个神经元的输出形式如下:
a = f ( w ⊤ x + b ) a = f(w^\top x + b) a=f(w⊤x+b)
其中:
- f f f 是激活函数
- w ⊤ x + b w^\top x + b w⊤x+b 是线性部分,决定输入的加权求和和偏移
激活函数 f ( ⋅ ) f(\cdot) f(⋅) 的引入,使得神经网络具备学习非线性关系的能力。
常见激活函数
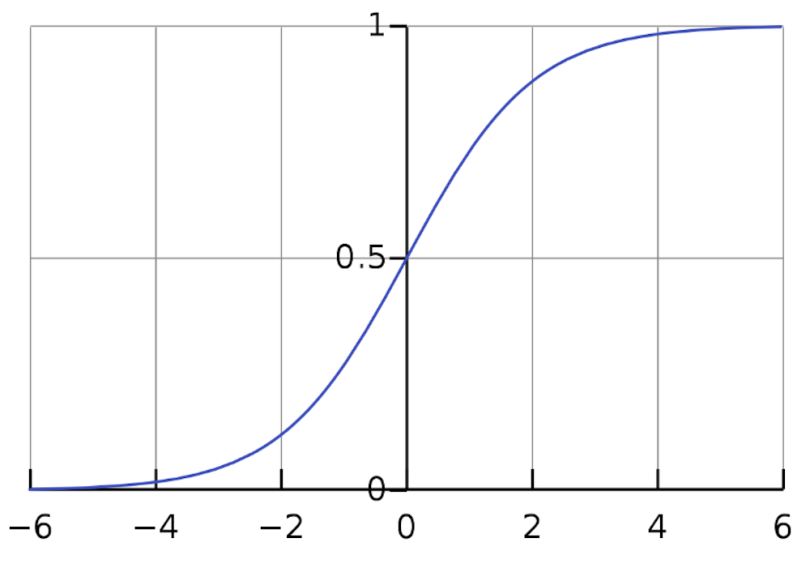
1. Sigmoid(S型函数)
f ( x ) = 1 1 + e − x f(x) = \frac{1}{1 + e^{-x}} f(x)=1+e−x1
输出范围: ( 0 , 1 ) (0, 1) (0,1)
常用于早期网络、概率建模
缺点:梯度容易消失、饱和区间较大
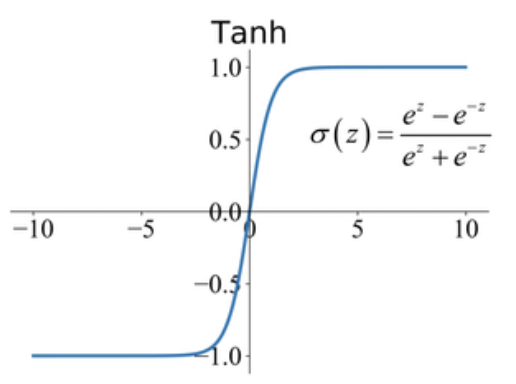
2. Tanh(双曲正切)
f ( x ) = e x − e − x e x + e − x = 2 ⋅ sigmoid ( 2 x ) − 1 f(x) = \frac{e^x - e^{-x}}{e^x + e^{-x}} = 2 \cdot \text{sigmoid}(2x) - 1 f(x)=ex+e−xex−e−x=2⋅sigmoid(2x)−1
- 输出范围: ( − 1 , 1 ) (-1, 1) (−1,1)
- 中心化特性优于 sigmoid,训练更稳定
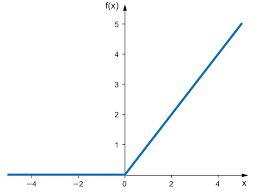
3. ReLU(Rectified Linear Unit)
f ( x ) = max ( 0 , x ) f(x) = \max(0, x) f(x)=max(0,x)
- 当前主流激活函数
- 计算简单,不饱和区域梯度稳定
- 缺点:负区间完全为零(神经元死亡)
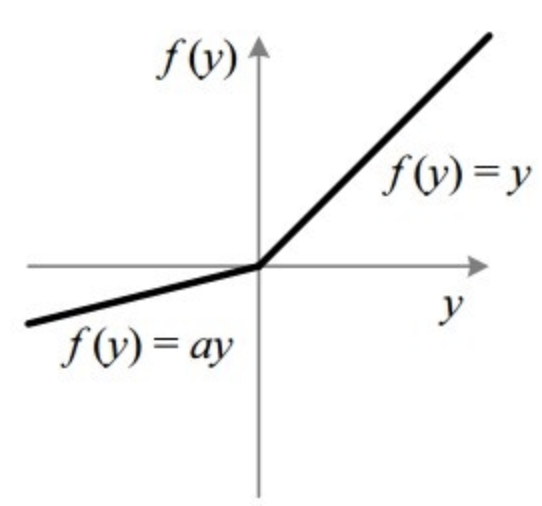
4. Leaky ReLU
f ( x ) = { x , x ≥ 0 α x , x < 0 f(x) = \begin{cases} x, & x \geq 0 \\ \alpha x, & x < 0 \end{cases} f(x)={x,αx,x≥0x<0
弥补 ReLU 在负区间完全为 0 的问题
α \alpha α 是一个很小的正数(如 0.01)
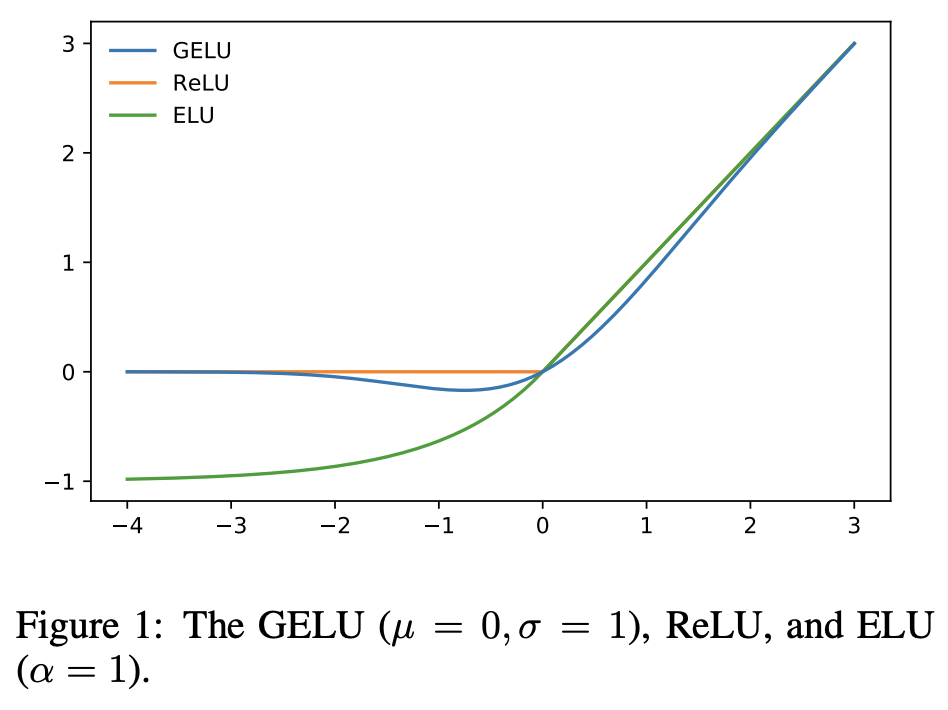
5. GELU(Gaussian Error Linear Unit)
f ( x ) = x ⋅ Φ ( x ) f(x) = x \cdot \Phi(x) f(x)=x⋅Φ(x)
其中 Φ ( x ) \Phi(x) Φ(x) 是标准正态分布的累积分布函数。
- 更平滑的 ReLU 变体
- 被用于 BERT、GPT 等大模型中
激活函数的可视化与作用
- 权重 w w w 控制曲线的陡峭程度(斜率)
- 偏置 b b b 控制曲线在输入空间的位置(左右平移)
- 激活函数本身决定了形状(阶跃、平滑、非线性)
举例说明:
- f ( w x + b ) f(wx + b) f(wx+b) 中改变 w w w 会使 Sigmoid 更陡或更平缓
- 改变 b b b 会让激活区间左移或右移
但注意:
偏置 b b b 不会改变激活函数的形状,只是移动它的激活位置。
而组合多个神经元后,整个网络的输出函数形状就可以被灵活控制,例如拼接成阶梯函数、塔函数等复杂结构。
7. 反向传播与激活函数的梯度问题
在神经网络训练中,我们通过最小化损失函数来更新权重和偏置,这一过程依赖于反向传播算法(Backpropagation)。
反向传播的核心思想是利用链式法则计算每一层参数对损失函数的梯度。
链式法则回顾
对于复合函数:
L = f ( g ( x ) ) ⇒ d L d x = f ′ ( g ( x ) ) ⋅ g ′ ( x ) L = f(g(x)) \Rightarrow \frac{dL}{dx} = f'(g(x)) \cdot g'(x) L=f(g(x))⇒dxdL=f′(g(x))⋅g′(x)
在神经网络中每一层都相当于一次嵌套函数变换,因而可以通过链式法则将梯度从输出层反传至输入层。
激活函数对梯度的影响
梯度的传播会经过每一层的激活函数:
- 若激活函数的导数为零或极小(如 sigmoid 饱和区),则梯度容易消失
- 若激活函数导数过大或不连续,可能造成不稳定训练(如 ReLU 的断点)
各类激活函数的导数
Sigmoid:
f ′ ( x ) = f ( x ) ( 1 − f ( x ) ) f'(x) = f(x)(1 - f(x)) f′(x)=f(x)(1−f(x))
→ 导数最大为 0.25,容易出现梯度消失Tanh:
f ′ ( x ) = 1 − f ( x ) 2 f'(x) = 1 - f(x)^2 f′(x)=1−f(x)2
→ 比 sigmoid 好,但也有饱和区ReLU:
f ′ ( x ) = { 1 , x > 0 0 , x ≤ 0 f'(x) = \begin{cases} 1, & x > 0 \\ 0, & x \leq 0 \end{cases} f′(x)={1,0,x>0x≤0
→ 在正区间梯度为 1,负区间为 0(死亡神经元)Leaky ReLU:
f ′ ( x ) = { 1 , x > 0 α , x < 0 f'(x) = \begin{cases} 1, & x > 0 \\ \alpha, & x < 0 \end{cases} f′(x)={1,α,x>0x<0
→ 解决了 ReLU 在负区间的“零梯度”问题GELU:
f ′ ( x ) ≈ Φ ( x ) + x ⋅ ϕ ( x ) f'(x) \approx \Phi(x) + x \cdot \phi(x) f′(x)≈Φ(x)+x⋅ϕ(x)
其中 ϕ ( x ) \phi(x) ϕ(x) 是标准正态分布密度函数→ 与ReLU相比平滑,使其能够更好地保留小梯度信息,增强模型的表达能力。
GELU通常比ReLU和Leaky实现更好的收敛性.
激活函数选择对训练的影响
| 激活函数 | 优点 | 缺点 |
|---|---|---|
| Sigmoid | 平滑、输出为概率 | 梯度消失严重 |
| Tanh | 零中心、平滑 | 饱和区影响训练 |
| ReLU | 快速收敛、稀疏激活 | 死亡神经元问题 |
| Leaky ReLU | 缓解死神经元 | 引入超参 α \alpha α |
| GELU | 平滑 & 有理论支持 | 计算复杂 |
因此,在实际模型设计中,需要根据任务和模型深度选择合适的激活函数,以保证训练稳定和效率。