一、步骤
1、目前支持ESP32
2、同一个局域网
3、上位机要安装代理(电脑或者linux设备)
4、可直接通过USB下载,也可以使用官方烧录工具,具体的分区表地址要从USB烧录的时候日志查看,一共四个文件,第三个文件在安装目录下。
4.1在Platformio项目下终端运行命令烧录
platformio.ini文件
; PlatformIO Project Configuration File
;
; Build options: build flags, source filter
; Upload options: custom upload port, speed and extra flags
; Library options: dependencies, extra library storages
; Advanced options: extra scripting
;
; Please visit documentation for the other options and examples
; https://docs.platformio.org/page/projectconf.html
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
board_microros_transport = wifi
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
main.cpp文件
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include <WiFi.h>
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
void setup()
{
Serial.begin(115200);
// 设置通过WIFI进行MicroROS通信
IPAddress agent_ip;
agent_ip.fromString("192.168.31.79");
// 设置wifi名称,密码,电脑IP,端口号
set_microros_wifi_transports("Xiaomi_320C", "66222888", agent_ip, 8888);
// 延时时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 microros_wifi
rclc_node_init_default(&node, "microros_wifi", "", &support);
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
}
void loop()
{
delay(100);
// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
}
pio run -v -t upload
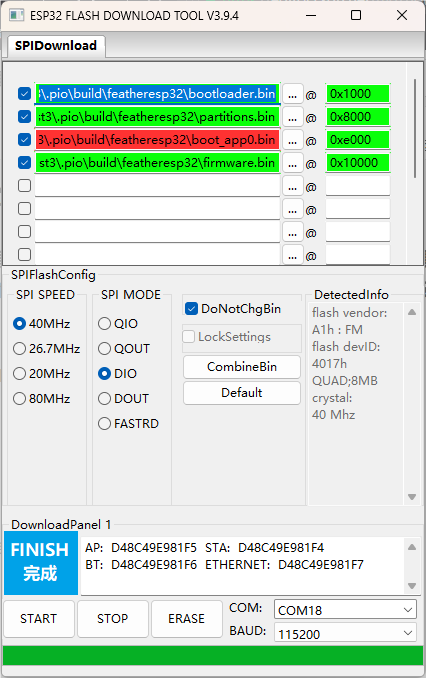
4.2 官方工具烧录
5、上位机安装 代理
注意:
sudo apt install ros-foxy-micro-ros-msgs
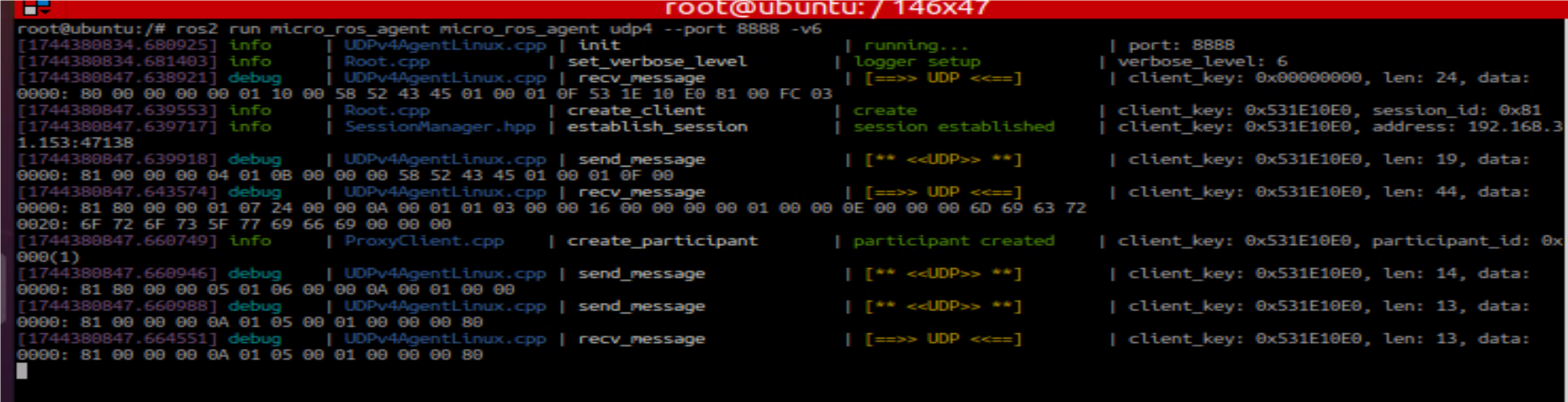
6、上位机运行代理
6.1
ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888 -v6
或者
ros2 run micro_ros_agent micro_ros_agent serial --dev /dev/ttyUSB0
6.2 重启ESP32
7、上位机查看
