STM32H5开发陀螺仪LSM6DSV16X.5--上报匿名上位机
概述
本文介绍了如何将 LSM6DSV16X 传感器的姿态数据通过匿名通信协议上报到上位机。通过获取传感器的四元数数据,并将其转换为欧拉角(Roll、Pitch、Yaw),然后按照协议格式化数据帧并通过串口传输到上位机。上位机接收后可进行实时显示和分析。这种方式广泛应用于姿态检测和控制系统,特别适合无人机、机器人等需要姿态控制的场景。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
https://www.bilibili.com/video/BV1sS5bzkEU9/
STM32H5开发陀螺仪LSM6DSV16X(5)----上报匿名上位机
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
硬件准备
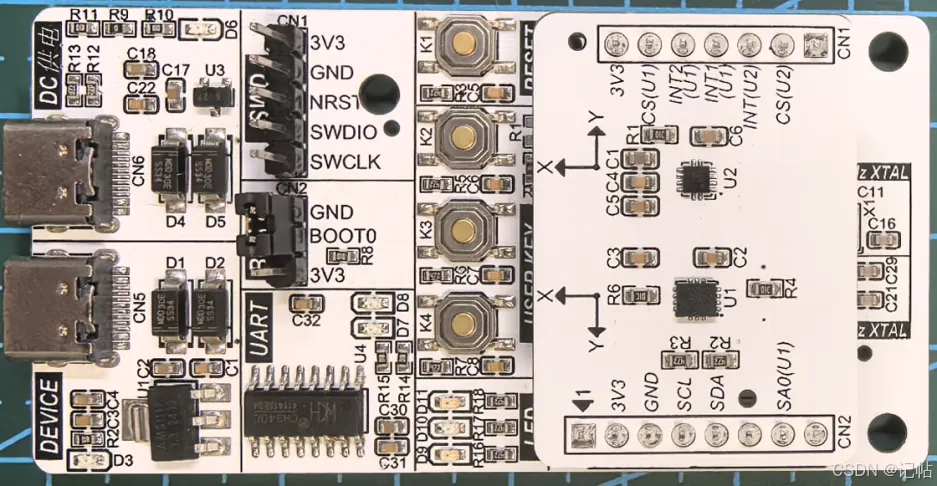
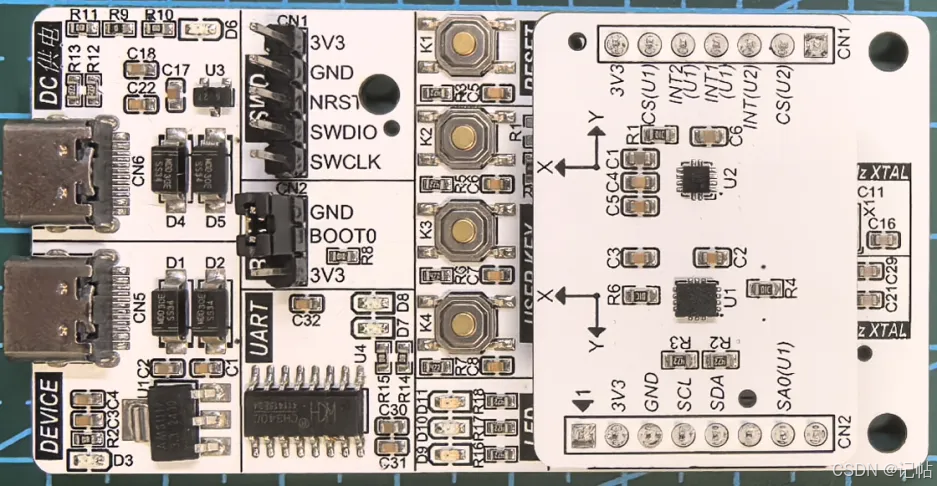
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。
主控为STM32H503CB,陀螺仪为LSM6DSV16X,磁力计为LIS2MDL。
参考程序
https://github.com/CoreMaker-lab/STM32H503_LSM6DSV16X_LIS2MDL
https://gitee.com/CoreMaker/STM32H503_LSM6DSV16X_LIS2MDL
上位机通讯
这里使用的是匿名助手的上位机
https://gitee.com/anotc/AnoAssistant
有专门的通讯协议

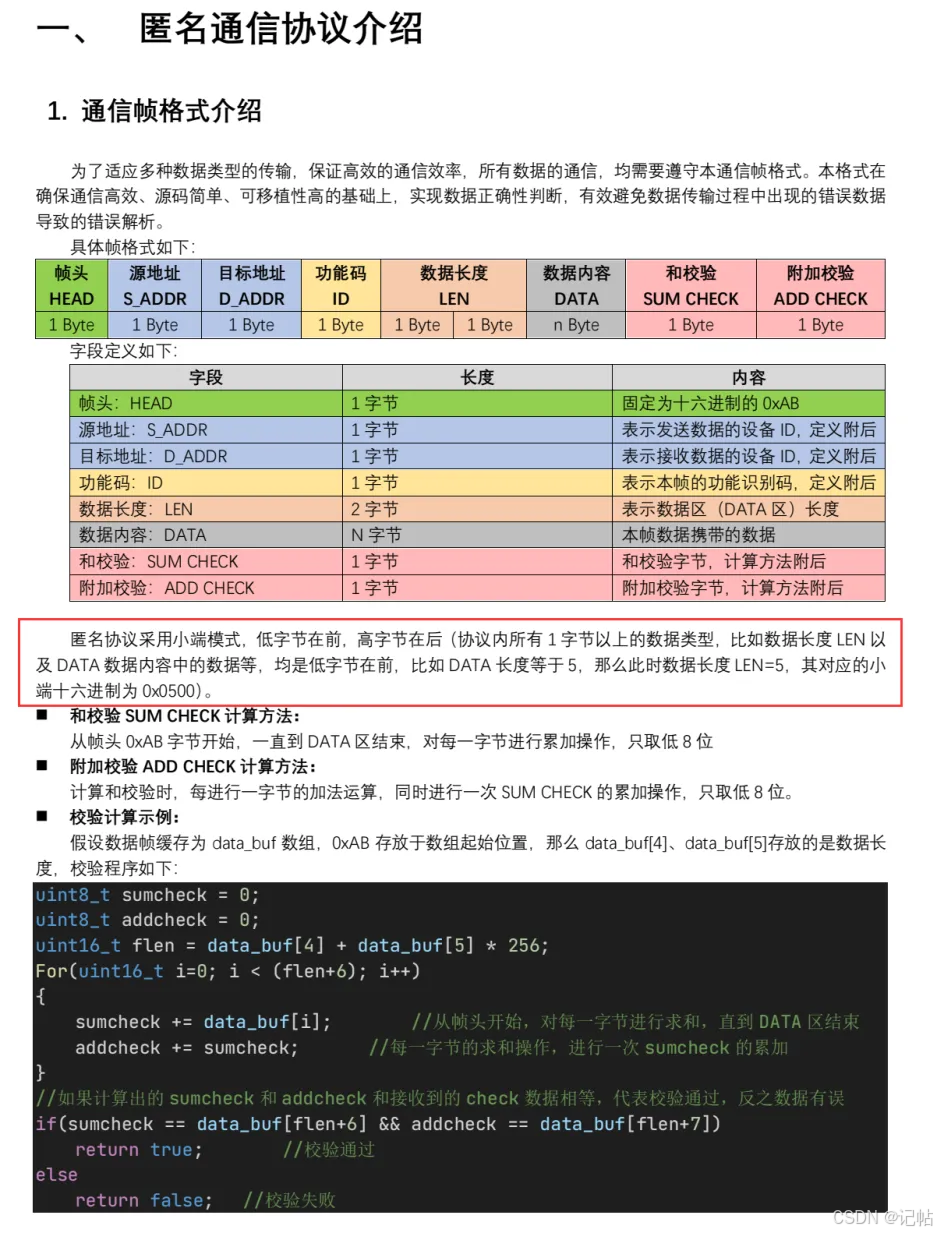
串口通讯协议格式如下所示,需要注意传输为小端模式传输。
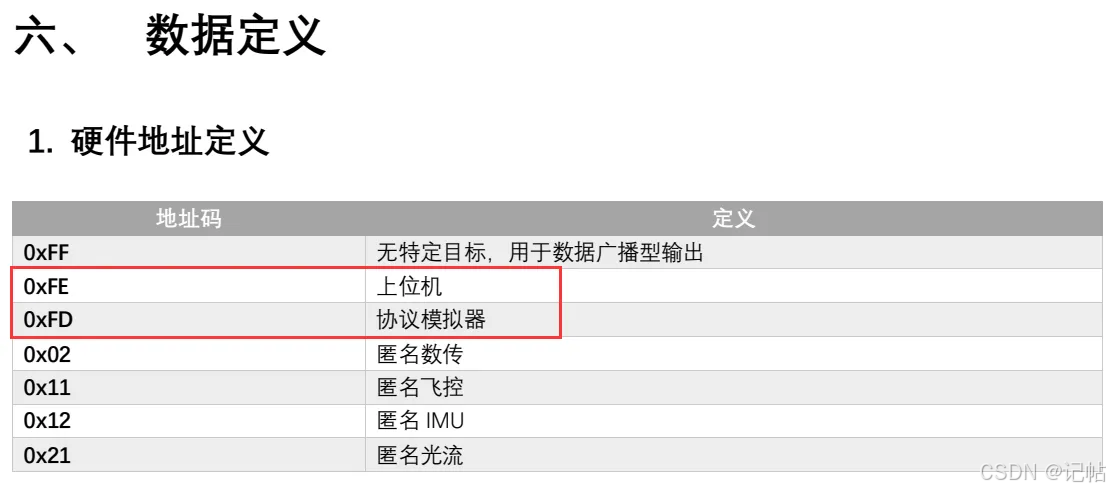
对应的源地址和目标地址分别为0xFD和0xFE。
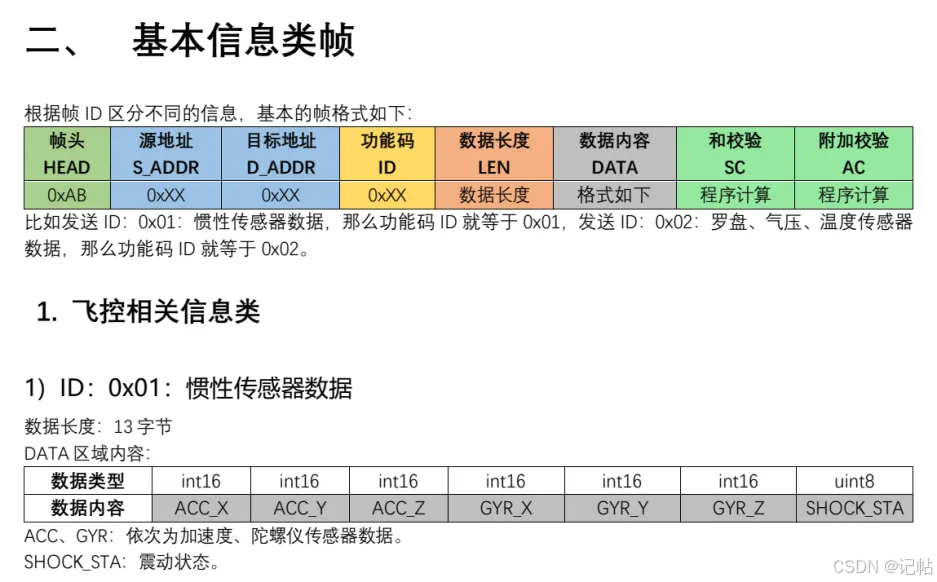
我们只需要上报加速度和陀螺仪数据,所以功能码为0x01,数据长度为0x0D,需要主要为小端模式传输。
陀螺仪工作方式
加速度计测量线性加速度,而陀螺仪测量角旋转。为此,他们测量了科里奥利效应产生的力。
陀螺仪是一种运动传感器,能够感测物体在一轴或多轴上的旋转角速度。它能够精确地感测自由空间中复杂的移动动作,因此成为追踪物体移动方位和旋转动作的必要设备。与加速计和电子罗盘不同,陀螺仪不需要依赖外部力量(如重力或磁场),可以自主地发挥其功能。因此,从理论上讲,只使用陀螺仪就可以完成姿态导航的任务。
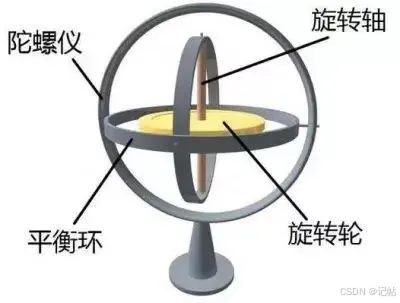
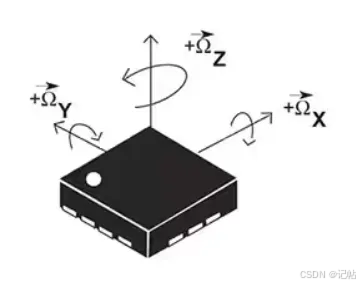
陀螺仪的每个通道检测一个轴的旋转。也就是说陀螺仪通过测量自身的旋转状态,判断出设备当前运动状态,是向前、向后、向上、向下、向左还是向右呢,是加速(角速度)还是减速(角速度)呢,都可以实现,但是要判断出设备的方位(东西南北),陀螺仪就没有办法。
MEMS陀螺仪主要利用科里奥利力(旋转物体在有径向运动时所受到的切向力)原理,公开的微机械陀螺仪均采用振动物体传感角速度的概念,利用振动来诱导和探测科里奥利力。
MEMS陀螺仪的核心是一个微加工机械单元,在设计上按照一个音叉机制共振运动,通过科里奥利力原理把角速率转换成一个特定感测结构的位移。
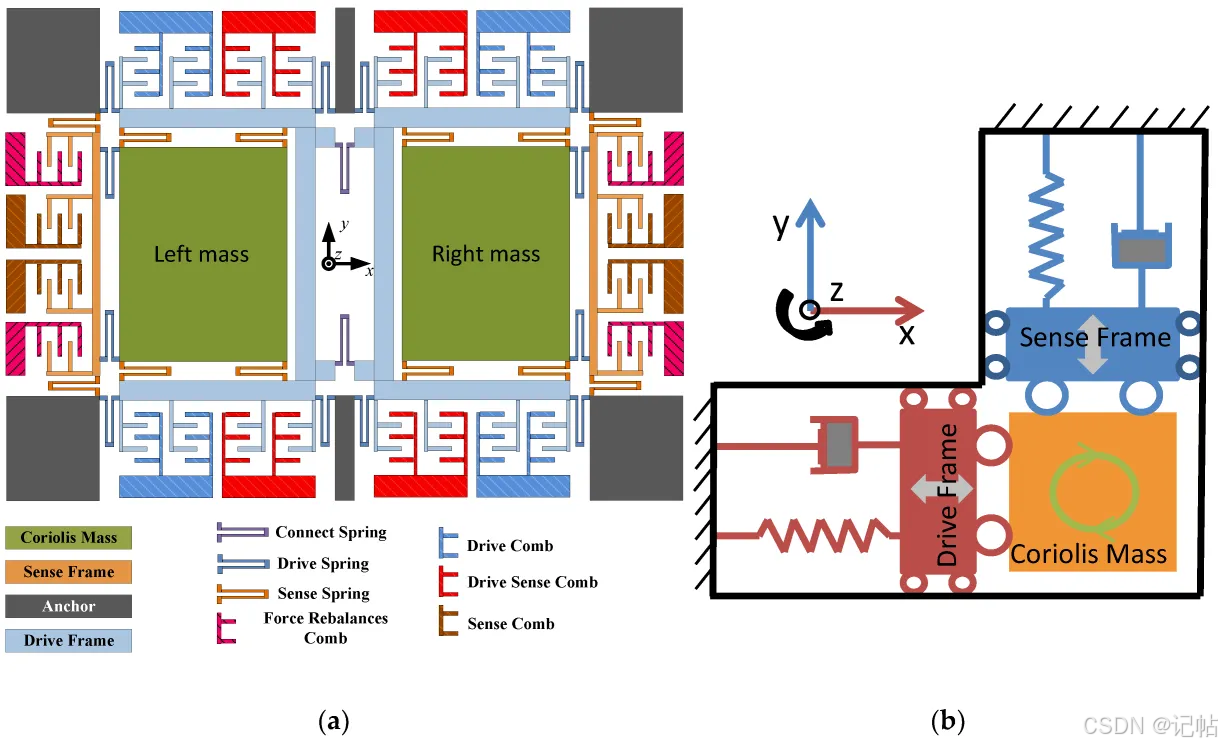
两个相同的质量块以方向相反的做水平震荡。当外部施加一个角速率,就会出现一个科氏力,力的方向垂直于质量运动方向,如垂直方向箭头所示。产生的科氏力使感测质量发生位移,位移大小与所施加的角速率大小成正比,科氏力引起的电容变化即可计算出角速率大小。
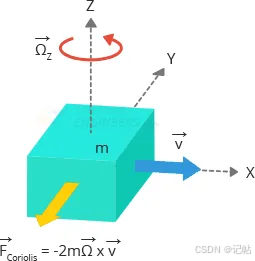
科里奥利效应指出,当质量 (m) 以速度 (v) 沿特定方向移动并施加外部角速率 (Ω)(红色箭头)时,科里奥利效应会产生一个力(黄色箭头),导致质量垂直移动。该位移的值与应用的角速率直接相关。
变量定义。
/* USER CODE BEGIN 2 */
float Yaw,Pitch,Roll; //偏航角,俯仰角,翻滚角
int16_t acc_int16[3] ={0,0,0};
int16_t gyr_int16[3] ={0,0,0};
float acc[3] = {0};
float gyr[3] = {0};
uint8_t data[21]={0};
data[0]=0xAB;//帧头
data[1]=0xFD;//源地址
data[2]=0xFE;//目标地址
data[3]=0x01;//功能码ID
data[4]=0x0D;//数据长度LEN
data[5]=0x00;//数据长度LEN 13
uint8_t sumcheck = 0;
uint8_t addcheck = 0;
int16_t angular_rate_raw[3]={0,0,0}; //pitch,roll,yaw
uint8_t data_angular_rate_raw[16]={0};
data_angular_rate_raw[0]=0xAB;//帧头
data_angular_rate_raw[1]=0xFD;//源地址
data_angular_rate_raw[2]=0xFE;//目标地址
data_angular_rate_raw[3]=0x03;//功能码ID
data_angular_rate_raw[4]=0x08;//数据长度LEN
data_angular_rate_raw[5]=0x00;//数据长度LEN 8
data_angular_rate_raw[6]=0x01;//mode = 1
data_angular_rate_raw[13]=0x00;//FUSION _STA:融合状态
/* USER CODE END 2 */
欧拉角数据的转换
将欧拉角 Roll、Pitch、Yaw 乘以 100,以保留两位小数的精度。并且为 Yaw 数据减去了 18000,这通常是为了将欧拉角的范围转换为 [-18000, 18000] 这样方便传输的范围。
Roll=euler[2];
Pitch=euler[1];
Yaw=euler[0];
int16_t Roll_int16;
int16_t Pitch_int16;
int16_t Yaw_int16;
Roll_int16 = (int16_t)(Roll);
Pitch_int16 = (int16_t)(Pitch);
Yaw_int16 = (int16_t)(Yaw);
Roll_int16=Roll_int16*100;
Pitch_int16=Pitch_int16*100;
Yaw_int16=Yaw_int16*100-18000;
数据帧填充
将转换后的 Roll_int16、Pitch_int16 和 Yaw_int16 数据依次填充到数据帧的相应位置。
// Roll=Roll*100;
// Pitch=Pitch*100;
// Yaw=Yaw*100;
data_angular_rate_raw[7]=Roll_int16>>8;//roll
data_angular_rate_raw[8]=Roll_int16;
data_angular_rate_raw[9]=Pitch_int16>>8;//pitch
data_angular_rate_raw[10]=Pitch_int16;
data_angular_rate_raw[11]=Yaw_int16>>8;//yaw
data_angular_rate_raw[12]=Yaw_int16;
校验和计算
使用了双层循环求和来计算校验和,这是一种累加和的方法,确保帧数据的完整性。
data_angular_rate_raw[13]=0;
sumcheck = 0;
addcheck = 0;
for(uint16_t i=0; i < 14; i++)
{
sumcheck += data_angular_rate_raw[i]; //从帧头开始,对每一字节进行求和,直到 DATA 区结束
addcheck += sumcheck; //每一字节的求和操作,进行一次 sumcheck 的累加
}
data_angular_rate_raw[14]=sumcheck;
data_angular_rate_raw[15]=addcheck;
数据发送
通过 UART 发送封装好的 16 字节数据帧。
HAL_UART_Transmit(&huart1 , (uint8_t *)&data_angular_rate_raw, 16, 0xFFFF);
// printf("Roll=%.2f,Pitch=%.2f,Yaw=%.2f\n",Roll,Pitch,Yaw)
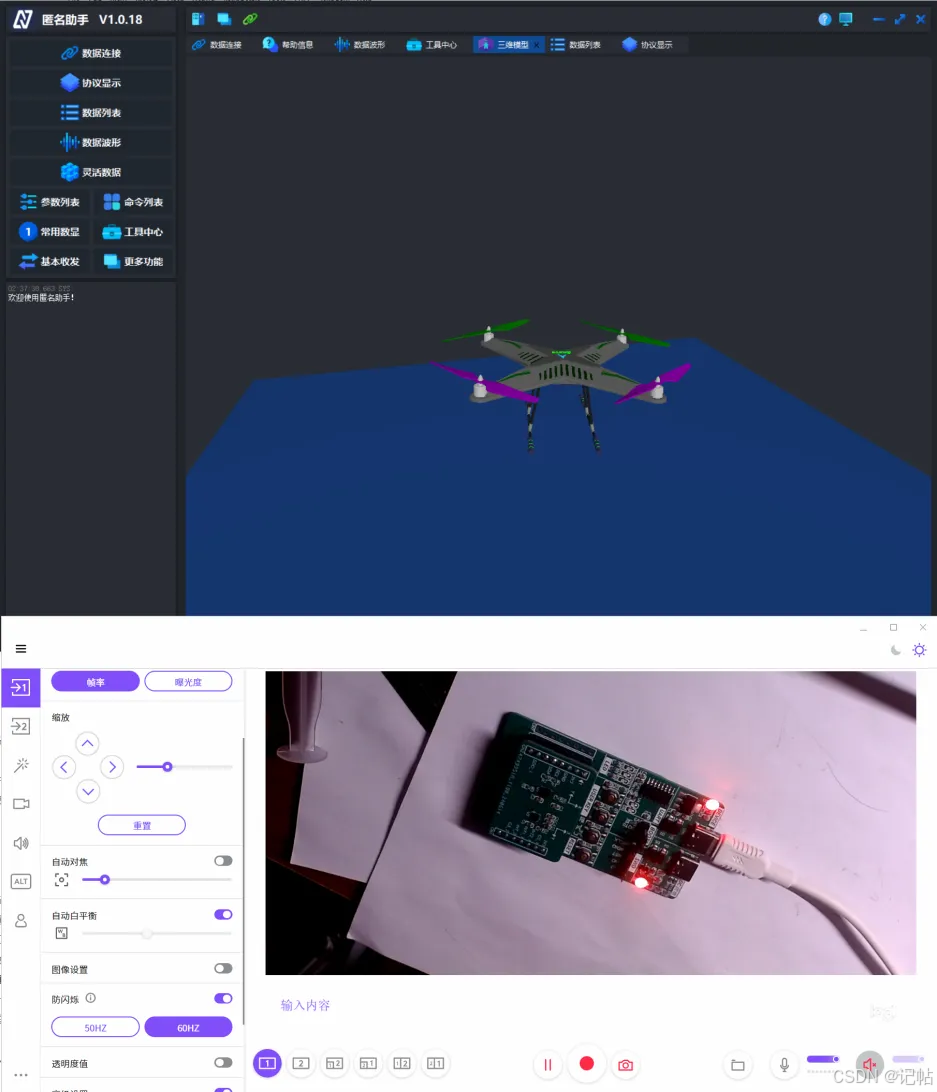
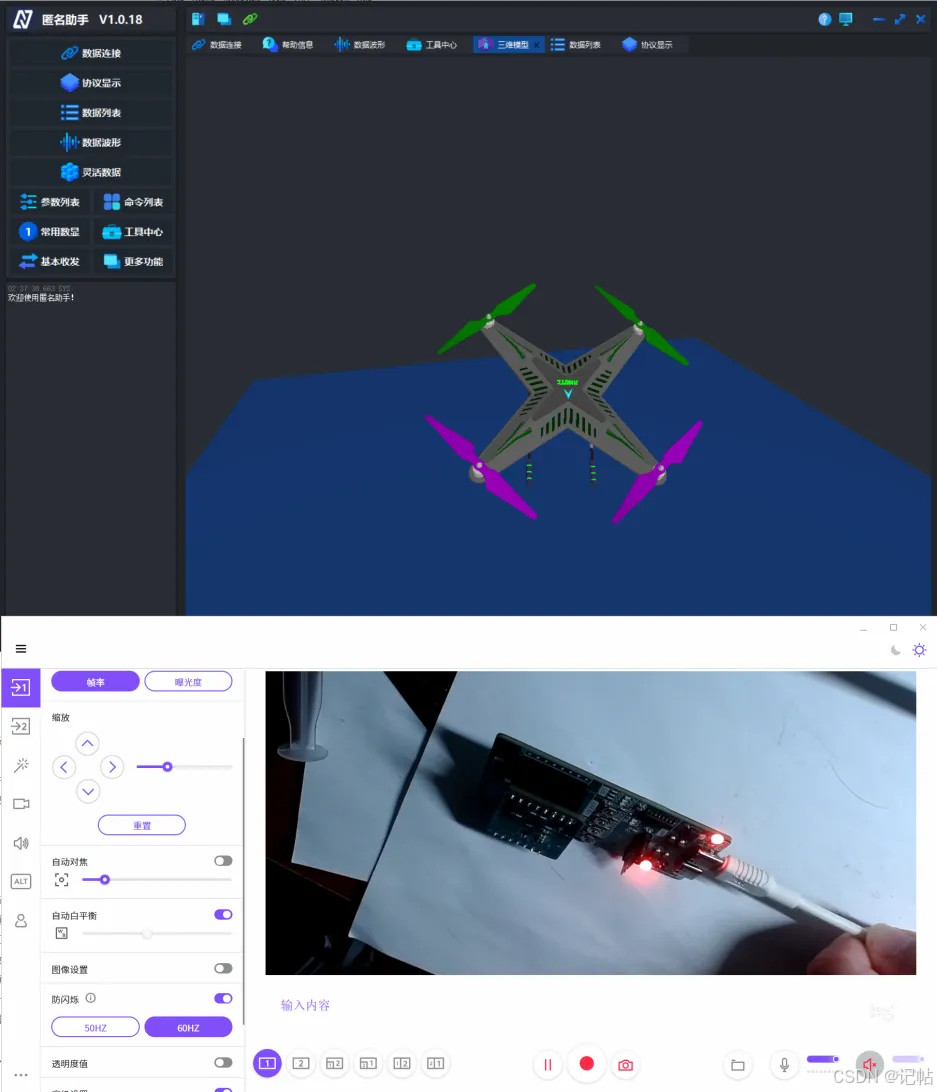
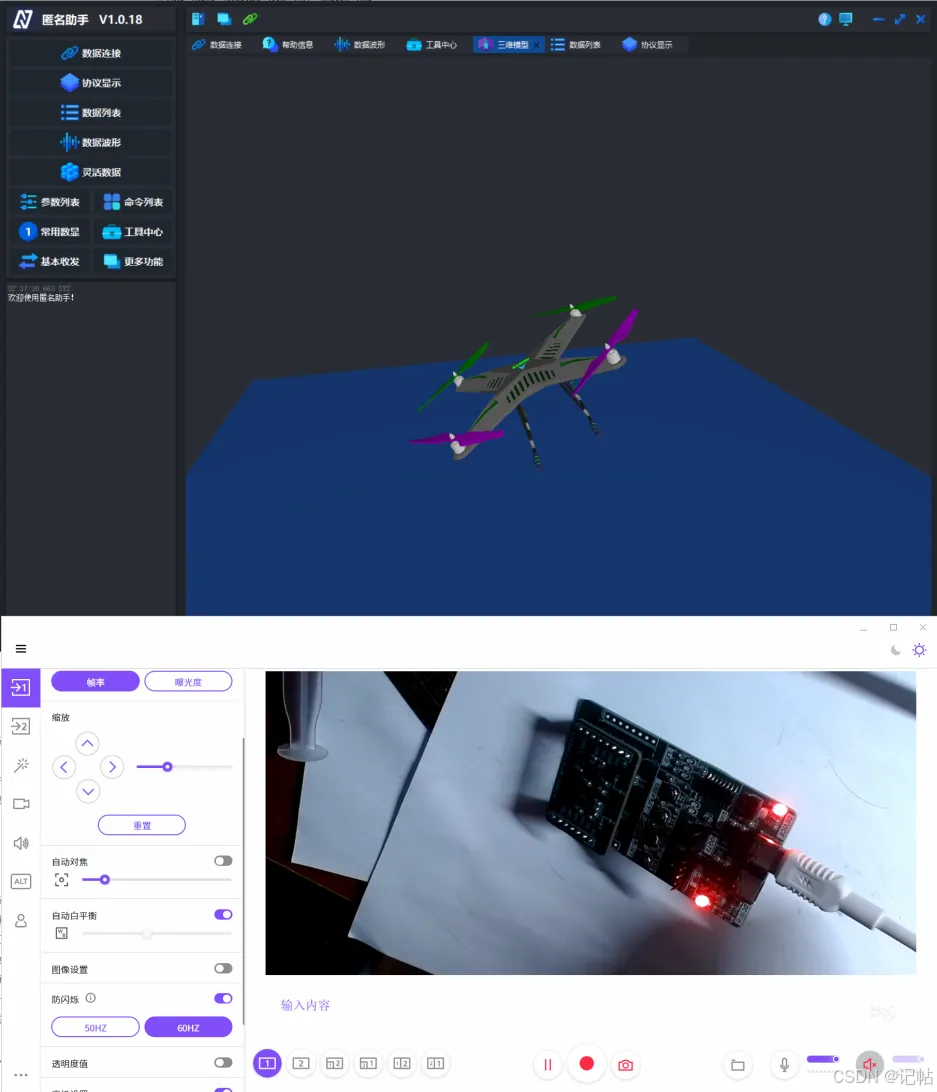
演示