目录
第1关:Resnet
任务描述
通过本关卡,你将掌握ResNet网络结构,并使用pytorch进行网络结构搭建。
- 相关知识
ResNet是2015年由He-Kaiming等人提出的,是深度学习任务中的经典且有效的网络,虽然最开始在分类任务中被使用,但后续在各个任务中被广泛验证。ResNet着眼于VGG网络等深度网络在深度达到一定程度后再增加层数,分类的性能就会下降,基于此,ResNet提出残差结构来解决这个问题。
ResNet
残差是指实际观察值与估计值之间的差,某个残差块的输入为x,拟合的输出为H(x),如果我们直接把输入x 直接传到输出作为观测结果,那么我们需要学习的残差就是F ( x ) = H ( x ) − x。下图是一个残差学习单元:
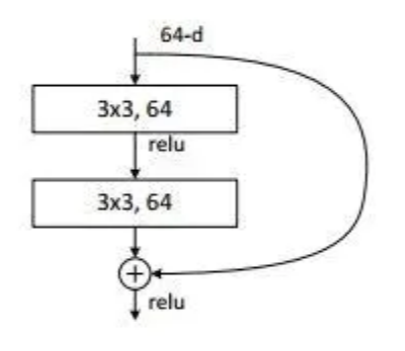 图 4-1-1 残差结构
图 4-1-1 残差结构
通过上图我们可以看出,残差学习是致力于使用多个有参网络层来学习输入、输出之间的残差F(x),有别于之前网络通过x学习网络的输出H(x),残差学习可以有效保留x的特性,这有利于消除深度网络中出现的梯度消失,保留更多上一层网络学习到的信息,从而解决网络不能加深的问题。
为了实际计算的考虑,ResNet使用了了一种bottleneck的结构块来代替常规的Resedual block,它像Inception网络那样通过使用1x1 conv来巧妙地缩减或扩张feature map维度从而使得我们的3x3 conv的filters数目不受外界即上一层输入的影响,自然它的输出也不会影响到下一层module。它的网络结构如下图:
 图4-1-2 Bottleneck的网络结构
图4-1-2 Bottleneck的网络结构
ResNet就是使用这样的Bottleneck层层堆叠形成了最后的网络,根据层数的多少有ResNet18,ResNet34,ResNet50等结构。具体的网络结构参数如下图:
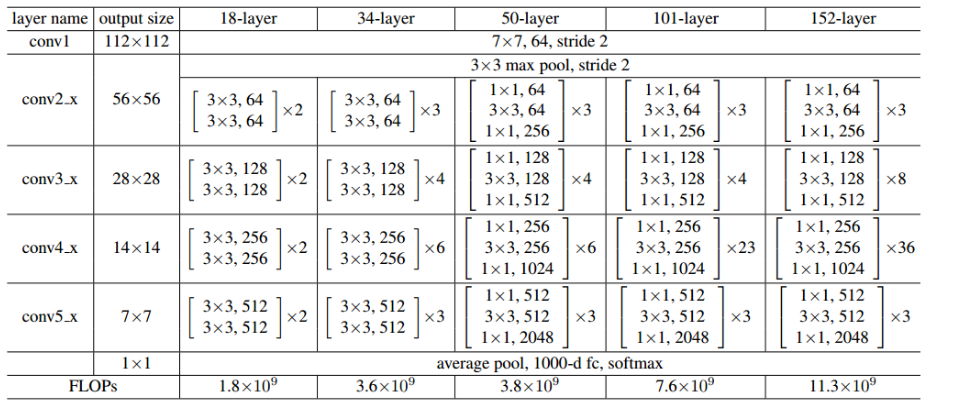 图4-1-3 ResNet网络结构
图4-1-3 ResNet网络结构
如上图,每一个括号内为一个Bottlencek,后面相乘的数量为该模块重复的次数。
Pytorch搭建Resnet
ResNet 网络实现代码如下:
- import torch
- import torch.nn as nn
- import torch.nn.functional as F
- # 用于ResNet18和34的残差块,用的是2个3x3的卷积
- class BasicBlock(nn.Module):
- expansion = 1
- def __init__(self, in_planes, planes, stride=1):
- super(BasicBlock, self).__init__()
- self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=3,
- stride=stride, padding=1, bias=False)
- self.bn1 = nn.BatchNorm2d(planes)
- self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
- stride=1, padding=1, bias=False)
- self.bn2 = nn.BatchNorm2d(planes)
- self.shortcut = nn.Sequential()
- # 经过处理后的x要与x的维度相同(尺寸和深度)
- # 如果不相同,需要添加卷积+BN来变换为同一维度
- if stride != 1 or in_planes != self.expansion*planes:
- self.shortcut = nn.Sequential(
- nn.Conv2d(in_planes, self.expansion*planes,
- kernel_size=1, stride=stride, bias=False),
- nn.BatchNorm2d(self.expansion*planes)
- )
- def forward(self, x):
- out = F.relu(self.bn1(self.conv1(x)))
- out = self.bn2(self.conv2(out))
- out += self.shortcut(x)
- out = F.relu(out)
- return out
- # 用于ResNet50,101和152的残差块,用的是1x1+3x3+1x1的卷积
- class Bottleneck(nn.Module):
- # 前面1x1和3x3卷积的filter个数相等,最后1x1卷积是其expansion倍
- expansion = 4
- def __init__(self, in_planes, planes, stride=1):
- super(Bottleneck, self).__init__()
- self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
- self.bn1 = nn.BatchNorm2d(planes)
- self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
- stride=stride, padding=1, bias=False)
- self.bn2 = nn.BatchNorm2d(planes)
- self.conv3 = nn.Conv2d(planes, self.expansion*planes,
- kernel_size=1, bias=False)
- self.bn3 = nn.BatchNorm2d(self.expansion*planes)
- self.shortcut = nn.Sequential()
- if stride != 1 or in_planes != self.expansion*planes:
- self.shortcut = nn.Sequential(
- nn.Conv2d(in_planes, self.expansion*planes,
- kernel_size=1, stride=stride, bias=False),
- nn.BatchNorm2d(self.expansion*planes)
- )
- def forward(self, x):
- out = F.relu(self.bn1(self.conv1(x)))
- out = F.relu(self.bn2(self.conv2(out)))
- out = self.bn3(self.conv3(out))
- out += self.shortcut(x)
- out = F.relu(out)
- return out
- class ResNet(nn.Module):
- def __init__(self, block, num_blocks, num_classes=10):
- super(ResNet, self).__init__()
- self.in_planes = 64
- self.conv1 = nn.Conv2d(3, 64, kernel_size=3,
- stride=1, padding=1, bias=False)
- self.bn1 = nn.BatchNorm2d(64)
- self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
- self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
- self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
- self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)
- self.linear = nn.Linear(512*block.expansion, num_classes)
- def _make_layer(self, block, planes, num_blocks, stride):
- strides = [stride] + [1]*(num_blocks-1)
- layers = []
- for stride in strides:
- layers.append(block(self.in_planes, planes, stride))
- self.in_planes = planes * block.expansion
- return nn.Sequential(*layers)
- def forward(self, x):
- out = F.relu(self.bn1(self.conv1(x)))
- out = self.layer1(out)
- out = self.layer2(out)
- out = self.layer3(out)
- out = self.layer4(out)
- out = F.avg_pool2d(out, 4)
- out = out.view(out.size(0), -1)
- out = self.linear(out)
- return out
- def ResNet18():
- return ResNet(BasicBlock, [2,2,2,2])
- def ResNet34():
- return ResNet(BasicBlock, [3,4,6,3])
- def ResNet50():
- return ResNet(Bottleneck, [3,4,6,3])
- def ResNet101():
- return ResNet(Bottleneck, [3,4,23,3])
- def ResNet152():
- return ResNet(Bottleneck, [3,8,36,3])
编程要求
根据提示,在右侧编辑器补充代码,完成Resnet网络的搭建。
测试说明
平台会对你编写的代码进行测试。
开始你的任务吧,祝你成功!
import torch.nn as nn
import torch.nn.functional as F
# 用于ResNet18和34的残差块,用的是2个3x3的卷积
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, in_planes, planes, stride=1):
super(BasicBlock, self).__init__()
########## Begin ##########
# 定义一个2D卷积层,输入通道数为in_planes,输出通道数为planes,卷积核大小为3x3,步长为stride,填充为1,不使用偏置项
# 为conv1的输出添加一个批归一化层(Batch Normalization),通道数与conv1的输出通道数相同
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=3,
stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
# 定义第二个2D卷积层,输入和输出通道数都为planes,卷积核大小为3x3,步长为1,填充为1,不使用偏置项
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
stride=1, padding=1, bias=False)
# 为conv2的输出添加一个批归一化层,通道数与conv2的输出通道数相同
self.bn2 = nn.BatchNorm2d(planes)
# 初始化一个空的Sequential模块,用于定义捷径(shortcut)连接,如果输入和输出维度相同,则此模块为空
self.shortcut = nn.Sequential()
# 经过处理后的x要与x的维度相同(尺寸和深度)
# 如果不相同,需要添加卷积+BN来变换为同一维度
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
)
########## End ##########
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.bn2(self.conv2(out))
out += self.shortcut(x)
out = F.relu(out)
return out
# 用于ResNet50,101和152的残差块,用的是1x1+3x3+1x1的卷积
class Bottleneck(nn.Module):
# 前面1x1和3x3卷积的filter个数相等,最后1x1卷积是其expansion倍
expansion = 4
def __init__(self, in_planes, planes, stride=1):
super(Bottleneck, self).__init__()
########## Begin ##########
# 定义一个2D卷积层conv1,输入通道数为in_planes,输出通道数为planes,卷积核大小为1x1,不使用偏置项
# 为conv1的输出添加一个批归一化层bn1,通道数与conv1的输出通道数(即planes)相同
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes)
# 定义一个2D卷积层,卷积核大小为3x3。
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
stride=stride, padding=1, bias=False)
# 为conv2的输出添加一个批归一化层bn2。
self.bn2 = nn.BatchNorm2d(planes)
# 定义一个2D卷积层conv3,卷积核大小为1x1。
self.conv3 = nn.Conv2d(planes, self.expansion*planes,
kernel_size=1, bias=False)
# 为conv3的输出添加一个批归一化层bn3
self.bn3 = nn.BatchNorm2d(self.expansion*planes)
# 初始化一个空的Sequential模块shortcut
self.shortcut = nn.Sequential()
# 如果步长stride不等于1或者输入通道数in_planes不等于输出通道数乘以扩张系数self.expansio
if stride != 1 or in_planes != self.expansion*planes:
# 添加一个1x1卷积层
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes,
kernel_size=1, stride=stride, bias=False),
# 为1x1卷积层的输出添加一个批归一化层
nn.BatchNorm2d(self.expansion*planes)
)
########## End ##########
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.shortcut(x)
out = F.relu(out)
return out
class ResNet(nn.Module):
def __init__(self, block, num_blocks, num_classes=1000):
super(ResNet, self).__init__()
self.in_planes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=3,
stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)
self.linear = nn.Linear(512*block.expansion, num_classes)
def _make_layer(self, block, planes, num_blocks, stride):
strides = [stride] + [1]*(num_blocks-1)
layers = []
for stride in strides:
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion
return nn.Sequential(*layers)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = F.avg_pool2d(out, 4)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out
def ResNet50():
return ResNet(Bottleneck, [3,4,6,3])
print(ResNet50())