RoboDK 自定义机器人
我们看到的 RoboDK 通常是这样的:比如 ABB 机器人连接到 RoboDK,RoboDK 会显示 ABB 机器人的仿真模型,和实时状态参数,模型姿态和机器人保持同步,拖拽模型机器人会跟随同步运动。
1. 自定义功能
RoboDK 支持用户自定义添加机器人模型,把自制的机器人添加到 RoboDK,自制机器人就可以达到 ABB 机器人的使用效果。
自定义机器人涉及以下几点:
(1) 构造机器人 3D 模型,把 RoboDK 的显示模型定制成你的机器人,显示同步。
(2) 配置关节运动以及 DH 结构参数,确保发送到机器人的参数是正确的。
(3) 基于 Python 适配通信驱动,和控制协议(把 RoboDK 的控制协议转换成你的控制协议)。
2. 处理 3D 模型
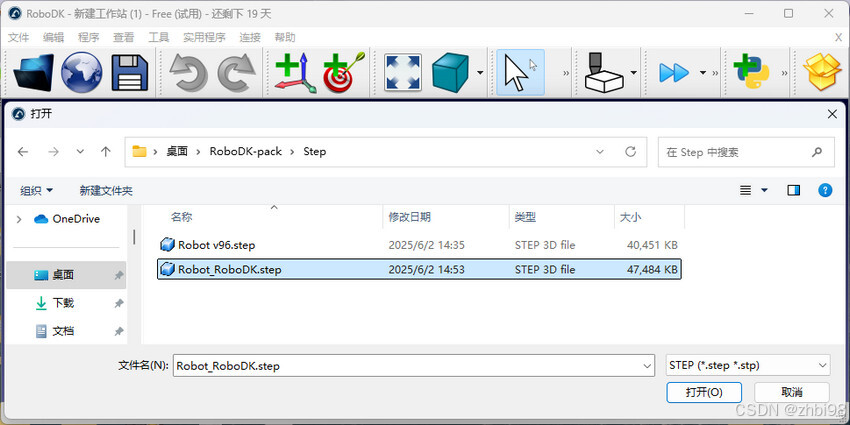
(1) RoboDK 支持直接导入 step 文件(不要求 Unified Robot Description Format,URDF 格式)。用专业 CAD 软件处理掉内部复杂细节(因为在 RoboDK 中处理大量部件通常不是很方便),再整体导出 step,再导入 RoboDK,如下。
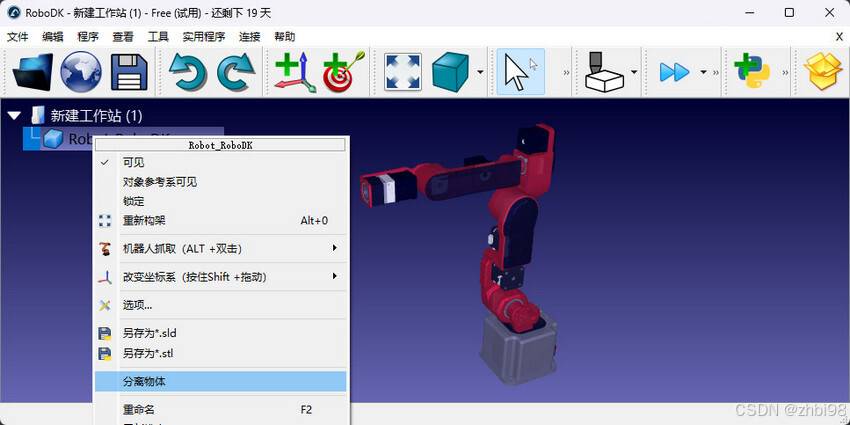
(2) 用 RoboDK 模型分割工具以零件为单位分割整体(因为关节连接部分需要保持活动,所以要分割)如下。
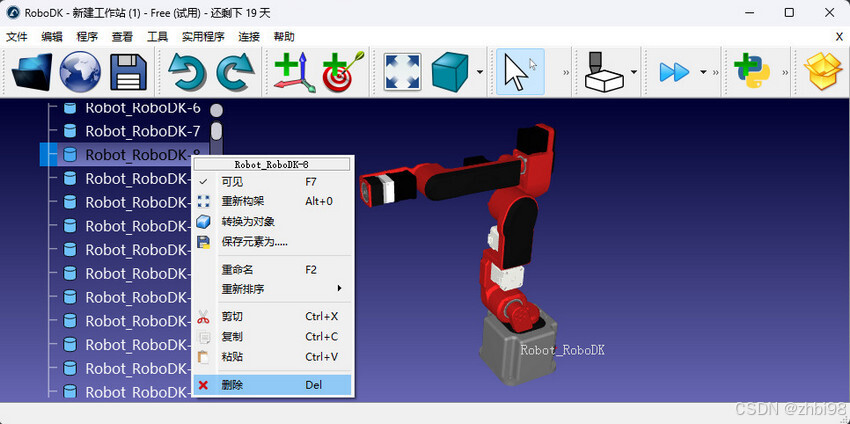
(3) 分割后左侧创建出更小的部件,如下。
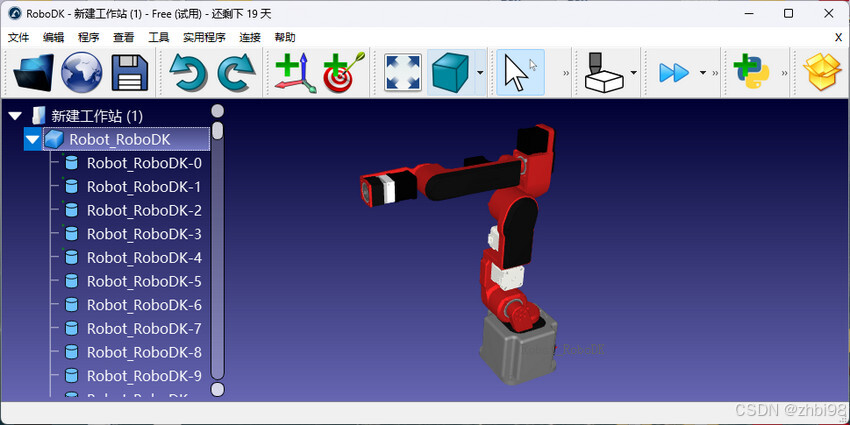
可以选中删除不必要的部件,来简化结构模型细节。
(4) 保持关节部分活动即可,其余复杂细节可以按照关节划分合并为整体,如下。
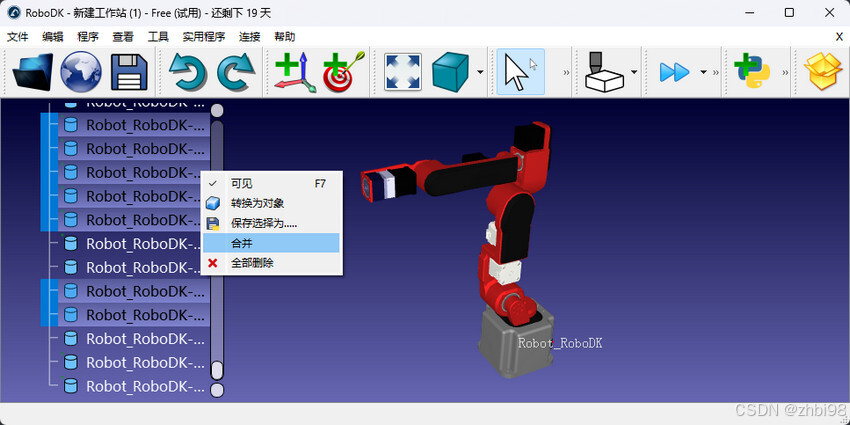
最后得到以关节划分的几个整体(关节连接能够活动即可),可以右键重命名,命名为 Base,Joint1-Joint6,如下。
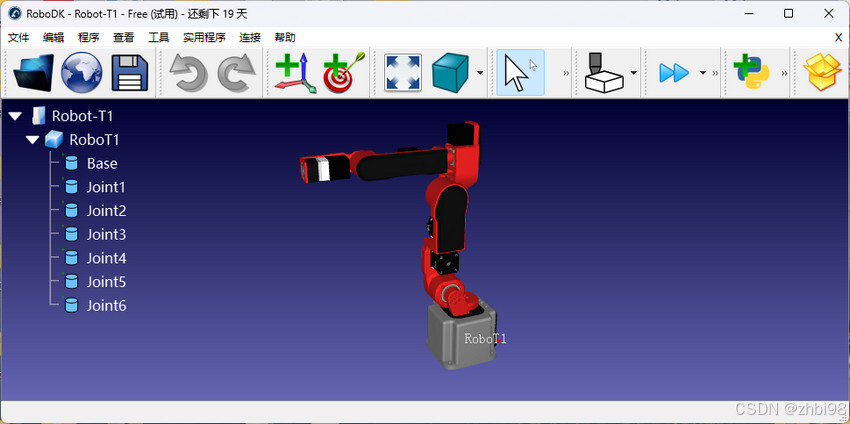
这样模型就处理好了。
3. 定义结构参数
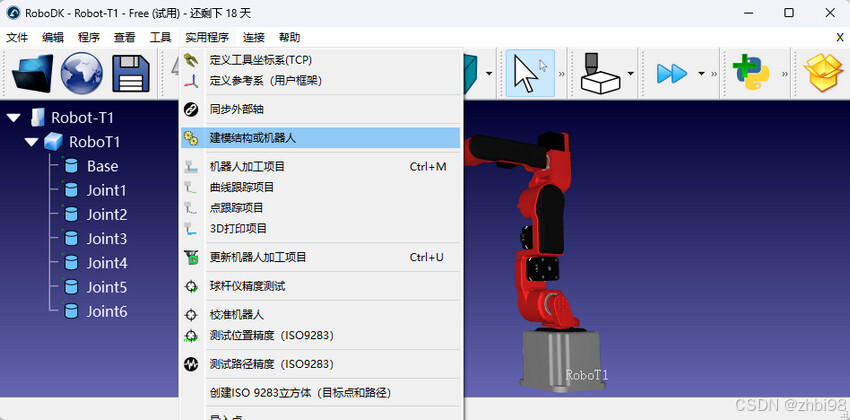
(1) step 模型处理后,把这几个部件定义为 RoboDK 机器人 3D 部件,击菜单栏 “实用程序”,再点击 “建模结构或机器人”,如下图。
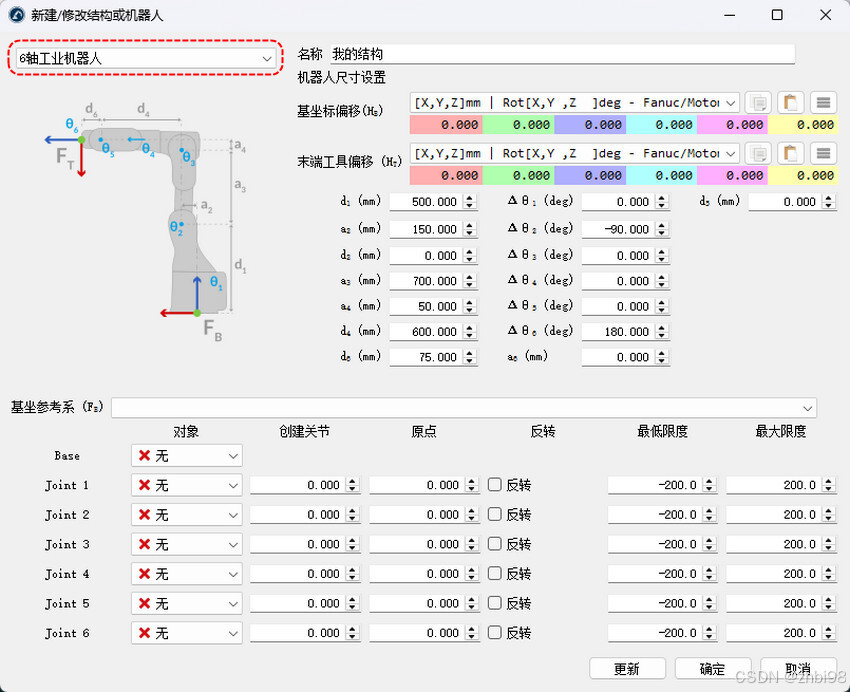
(2) 点击后弹出结构参数窗口,在下拉菜单中选择机器人类型(红色框部分)。
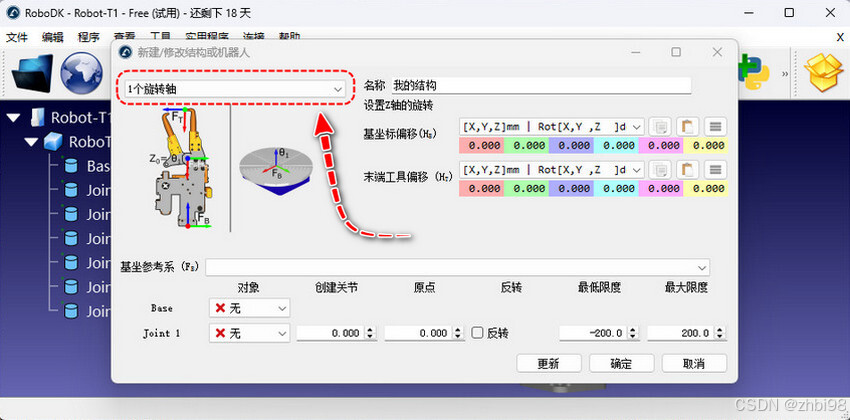
这里例如选择 6 轴工业机器人,选择后窗口内容变更为 6 轴工业机器人 相关的结构参数,如下图。
(3) 设置机器人名称,比如设置为 Robot-T1(红色框部分),再把机器人关节和step 部件对应起来(蓝色框部分)。
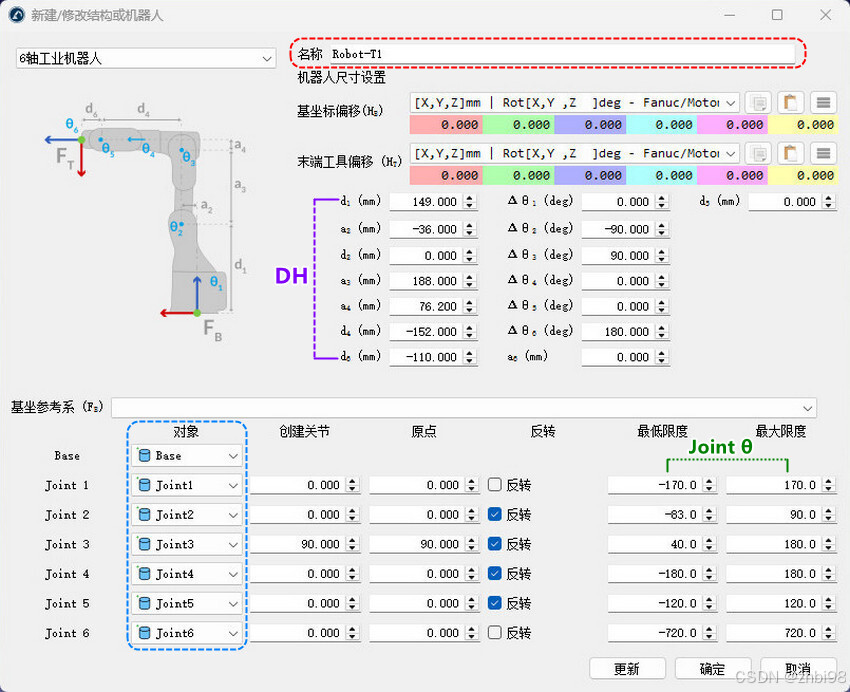
(4) 按照实际结构尺寸(紫色标识部分),填写 DH 参数(RoboDK 计算机器人位姿),其中 d1:L-BASE,a2:D-BASE,a3:L-ARM,a4:D-BLBOW,d4:L-FOREARM,d6:L-WRIST。
填写 DH 参数注意符号,step 模型(x,y,z)坐标轴与上面图示机器人 (x,y,z)坐标轴方向相反则参数取负值(例如上图
a2参数)。
(5) 设置关节运动角度范围 最低限度 和 最高限度 (绿色标识部分),确定是否要勾选 反转 反转角度变化和关节旋转方向关系。
(6) 设置机器人关节原点(默认角度),在 原点 列设置关节默认角度,比如 Joint3 设置 90 度。
(7) 所有设置好后点击 更新 按钮,预览最终的实际效果,先不要点击 确定,点击确定后就不能再修改 DH 参数,更新后右侧出现控制面板。
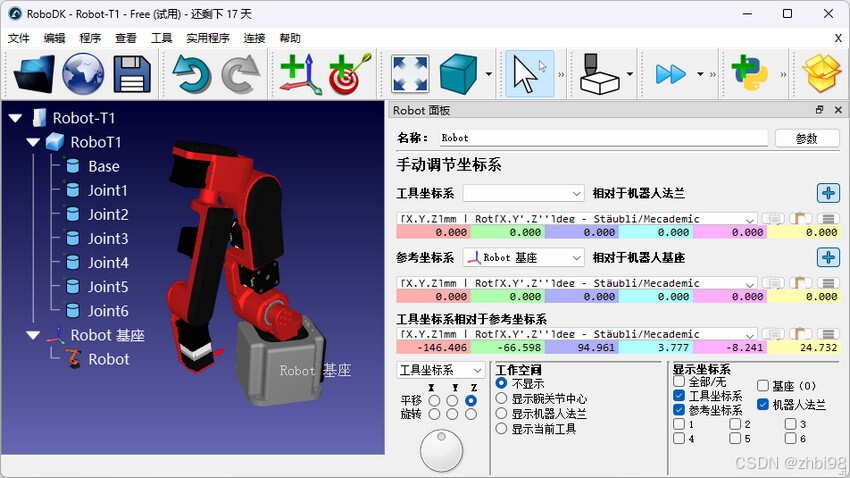
调节滑块,观察运动效果,无误后再点击 “确定”,否则继续修改 DH 参数,再次更新,直到无误为止。
点
更新/确定主界面多出一个机器人模型,一个是 step 实体,一个是以 step 构建出的 Robot 副本,最后要的是 Robot。
4. 导出 .robot
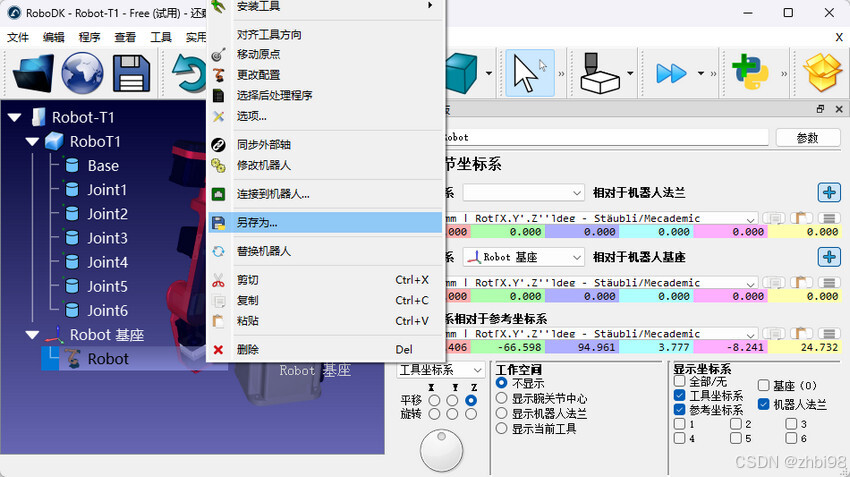
上一节点击 确定 后,对象树出现坐标系和机器人,最后选择右键把机器人另存为为 .robot 文件,这个 .robot 文件就是可以导入到 RoboDK 使用的。
以上就定义出了自定义的机器人,使用效果和 ABB 的相同。