1、Lidar测速的几种方案
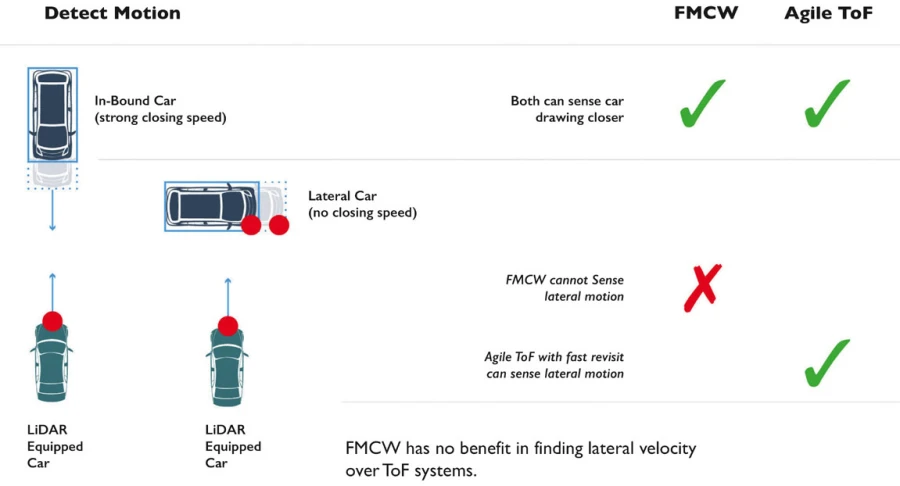
直接法:通过FMCW回波的FFT变换,直接得出目标的速度,但是这里的速度是径向速度;这里的速率是每个Lidar点云直接的velocity measurement,是直接的测量值。
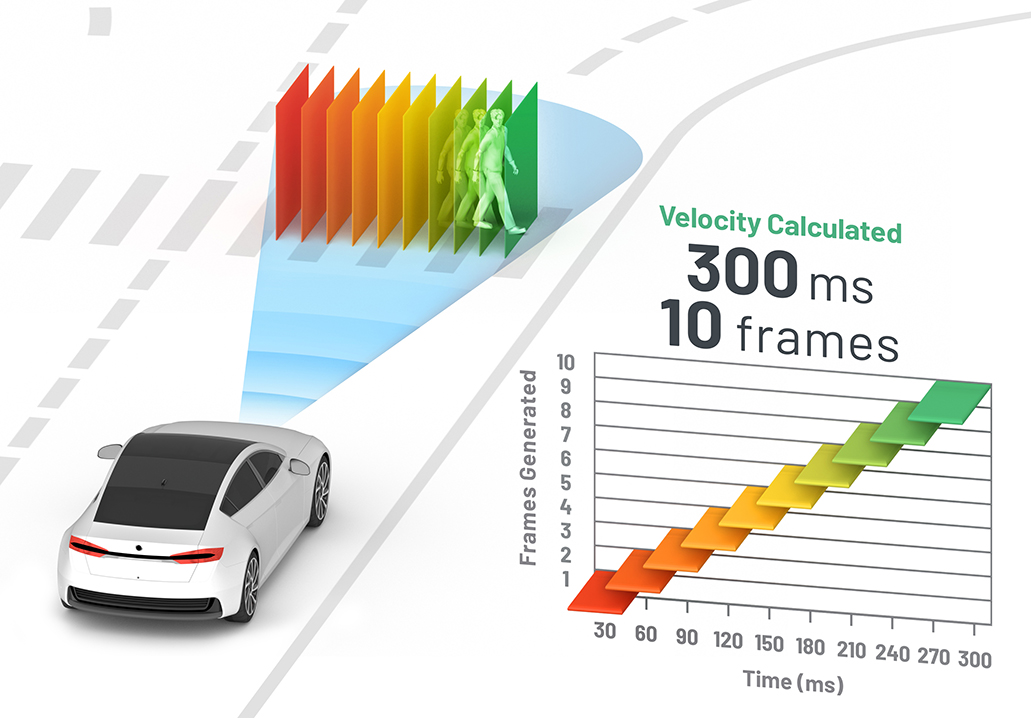
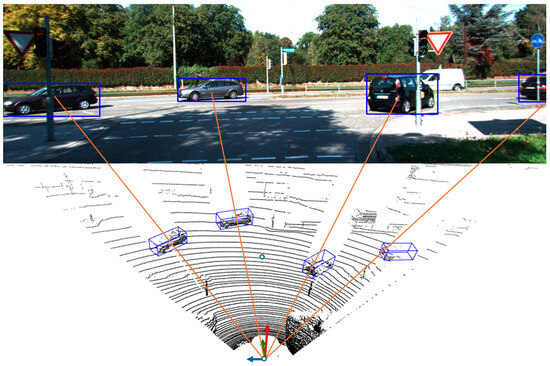
间接法:通过测量目标点云在两帧或者多帧之间的位移和时间的比值,计算出目标的速度;在实际的工程实现上,是需要先对Lidar的点云进行目标识别,完成目标的Tracking,在通过Tracking后的目标进行目标速度的估计,注意这里是velocity estimation,不是直接测量。
2、FMCW Lidar测速
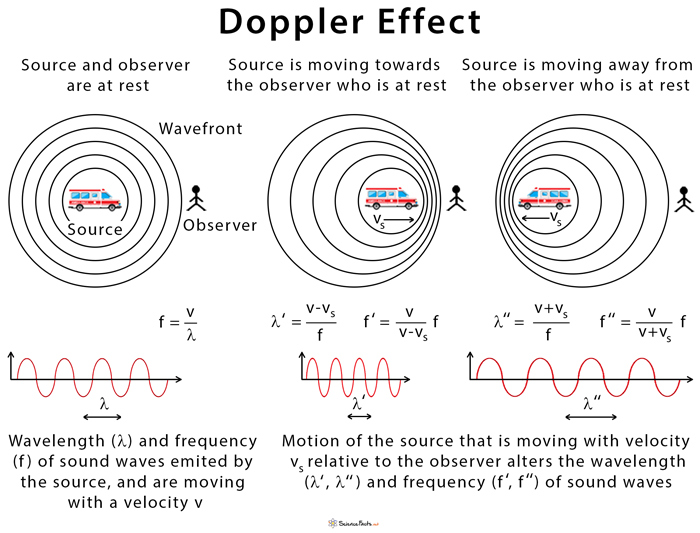
多普勒效应:当目标与Lidar之间存在相对运动的,若Lidar发射信号的工作频率为𝑓0,则接收信号的频率为𝑓0 +𝑓𝑑, 𝑓𝑑为多普 勒频率。将这种由于目标相对辐射源的运动而导致回波信号频 率的变化称为多普勒效应。
公式推导过程如下
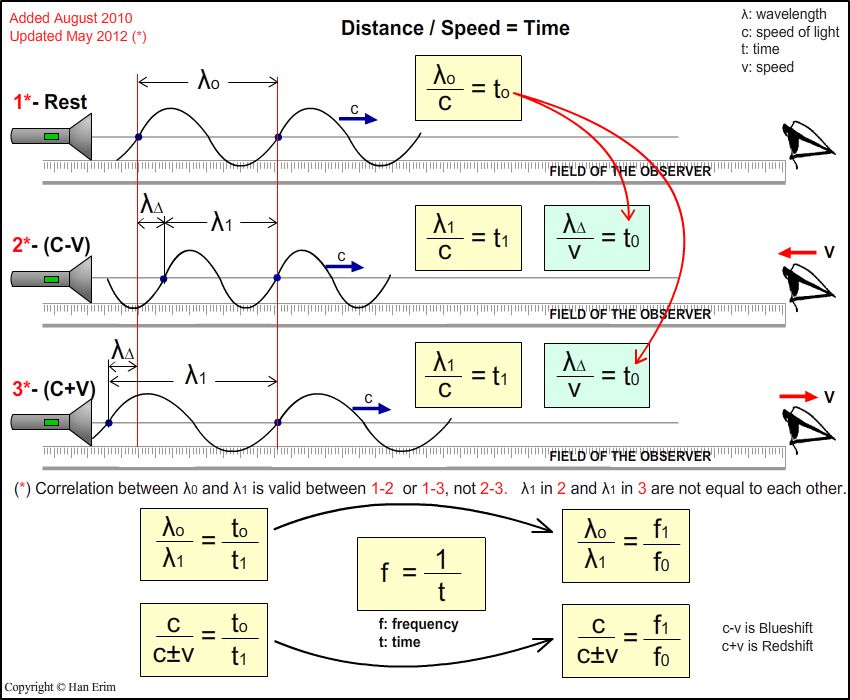
由上述公式推导过程可以得出,只有在两个不同的惯性系中才有可能发生多普勒效应。
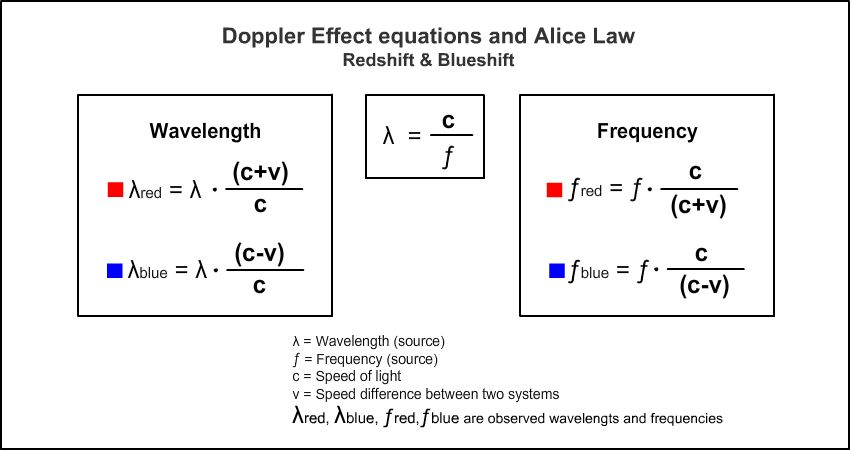
从上图可以看到,光速c为常数,由于多普勒效应,频率和波长成反比变化。通过测量这里的频率或者波长的变化,可以测量目标的想对速度。
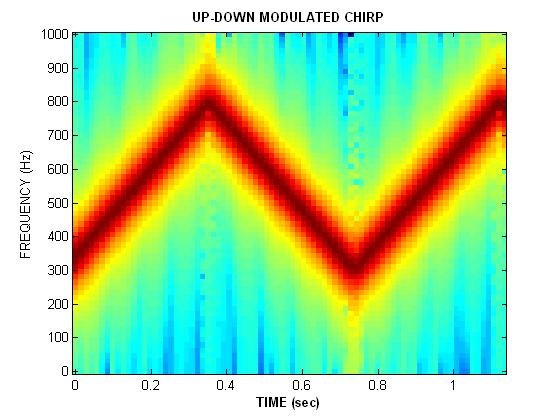
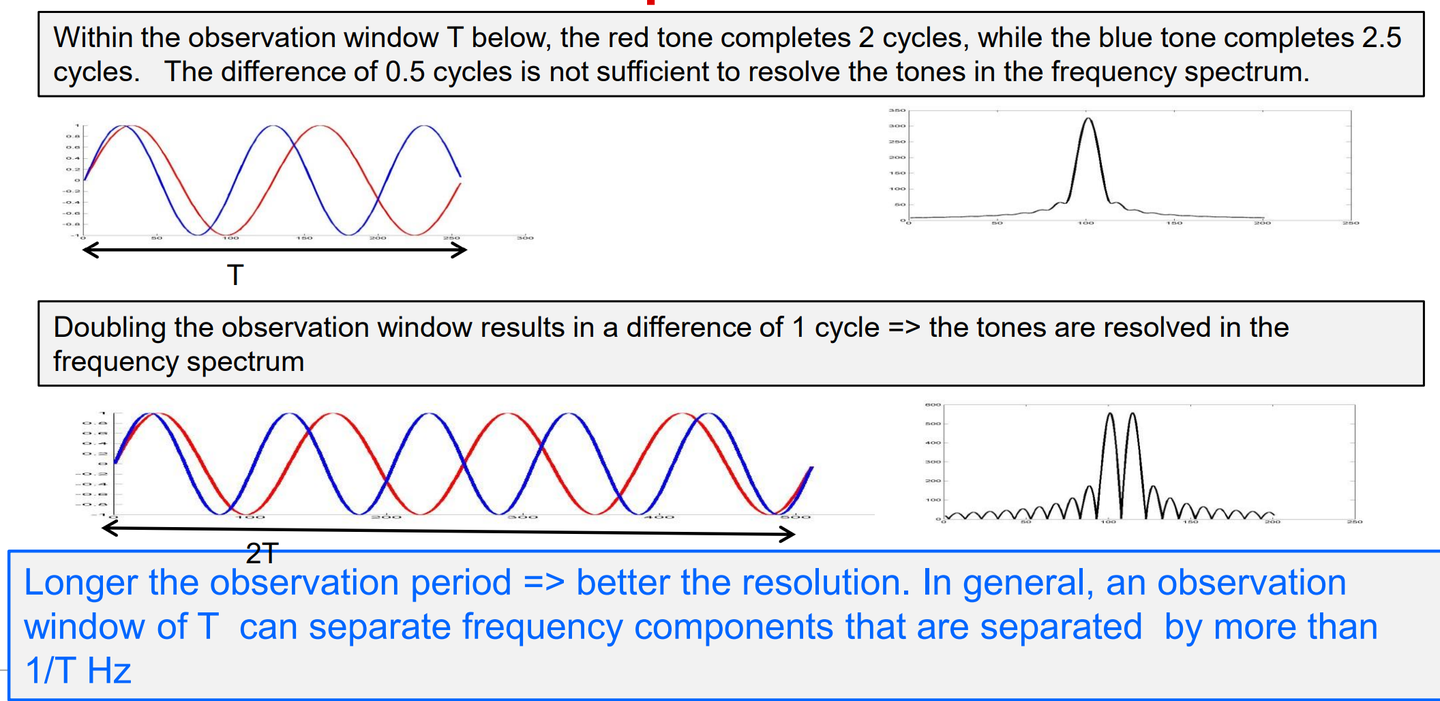
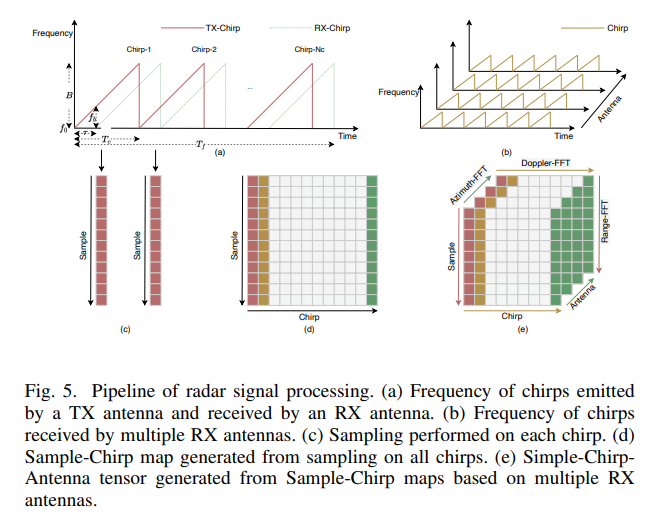
利用多普勒效应,主动生成跳频连续被FMCW(chirp)如下所示
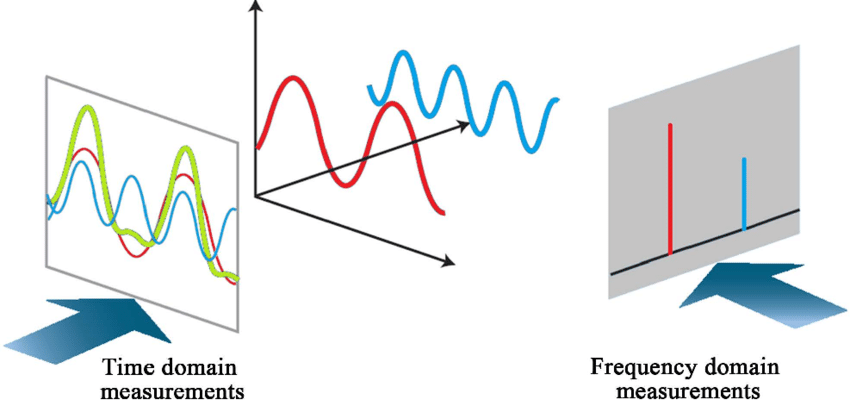
在时域上无法区分信号时(上图红色和蓝色叠加伪绿色),可以在频域进行区分(红色和蓝色)。
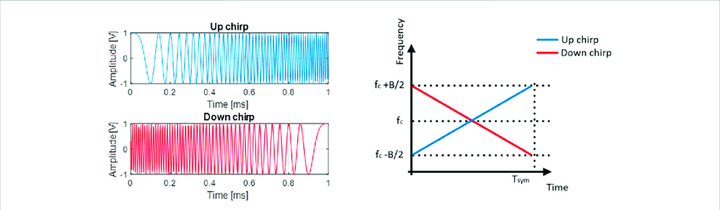
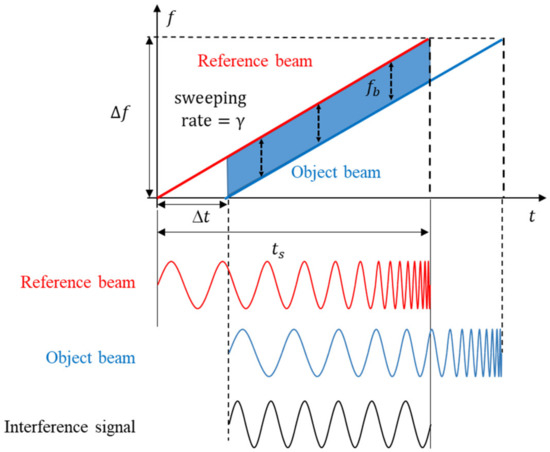
有了FMCW之后,通过TX发射chirp信号(下图中的红色信号),目标物发射chirp信号(下图中的蓝色信号)。如果没有相对运动,则TX RX频差固定,通过这个频差,可以测量出相对距离。
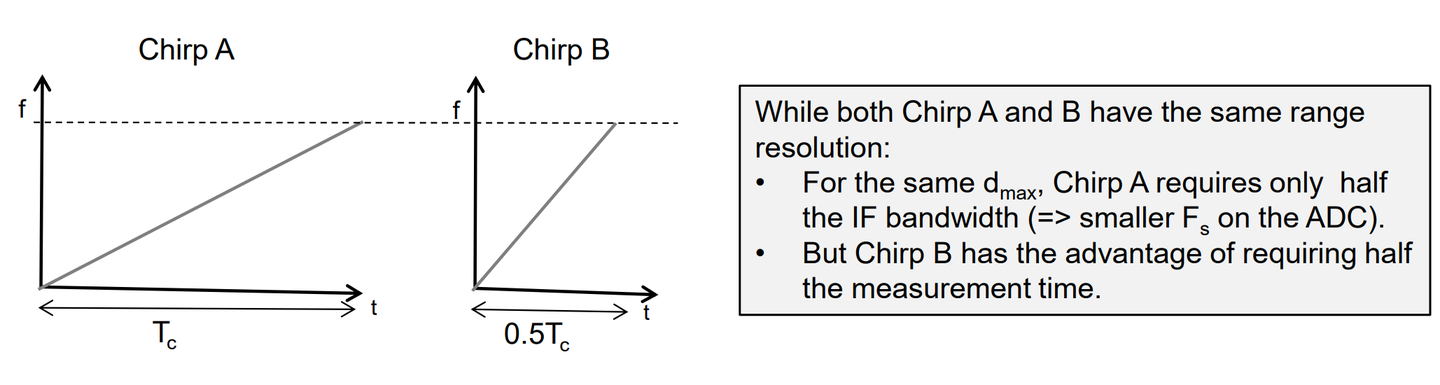
线性调频的调频速率定义如下
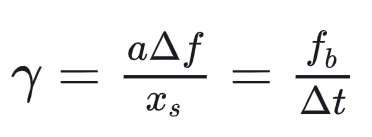
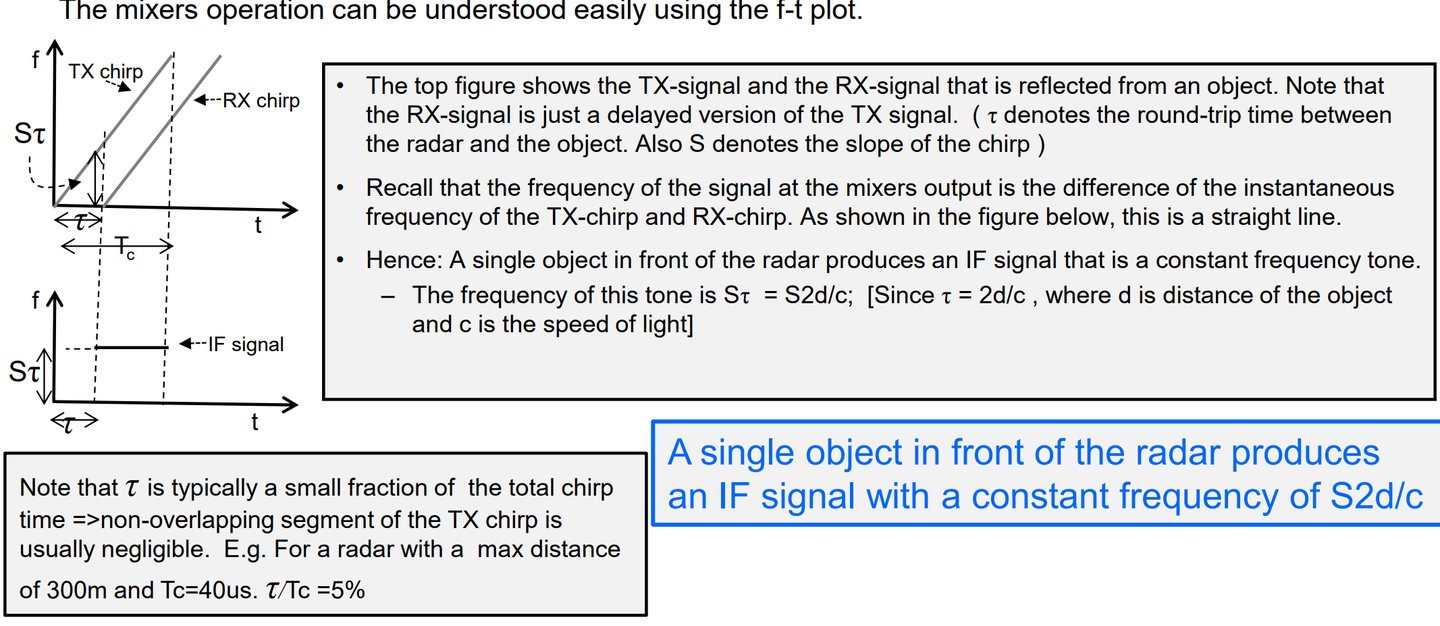
Lidar和目标之间的距离如下
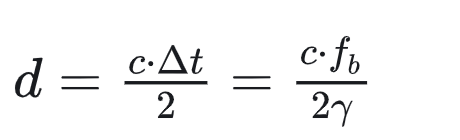
从上可以看到,距离d可以通过混频后的频率差fb得到,而不是△t;另外距离分辨率可以从下式得到
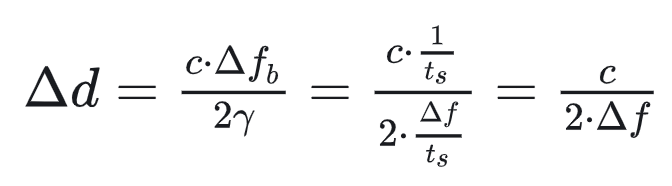
距离分辨率
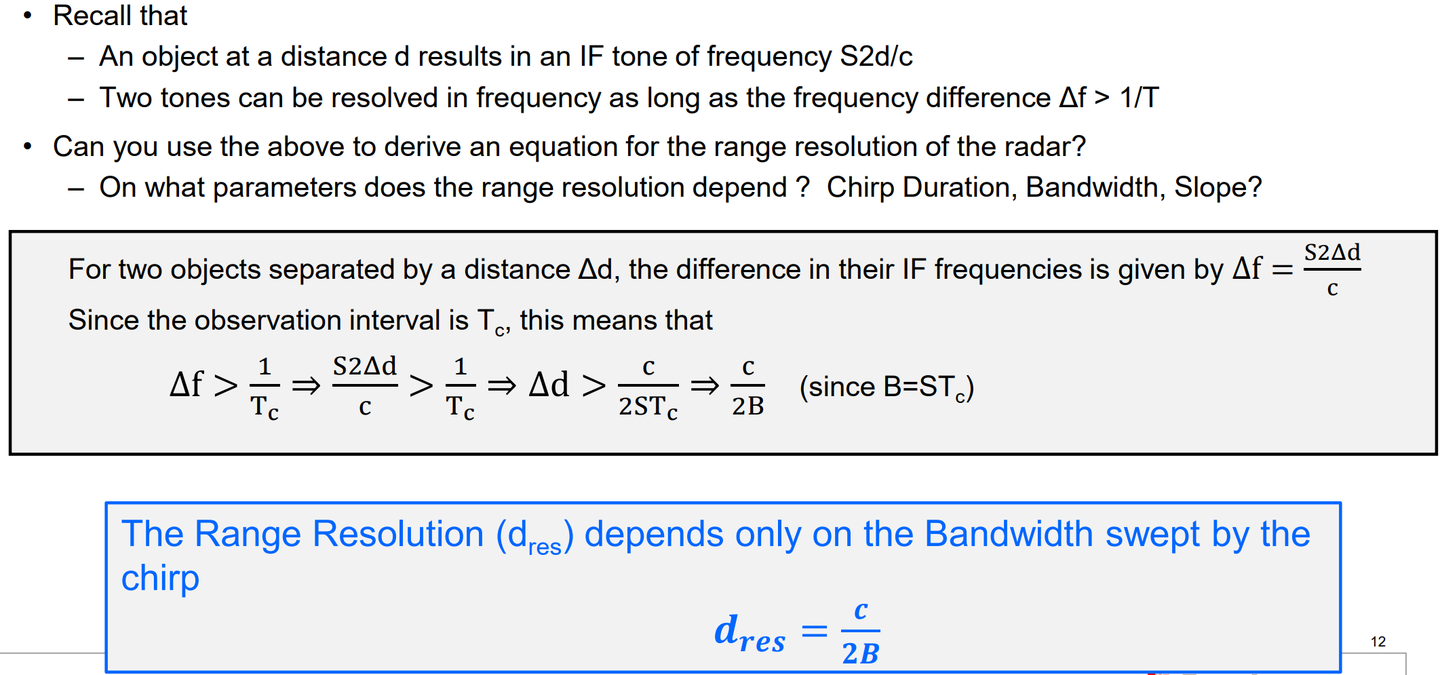
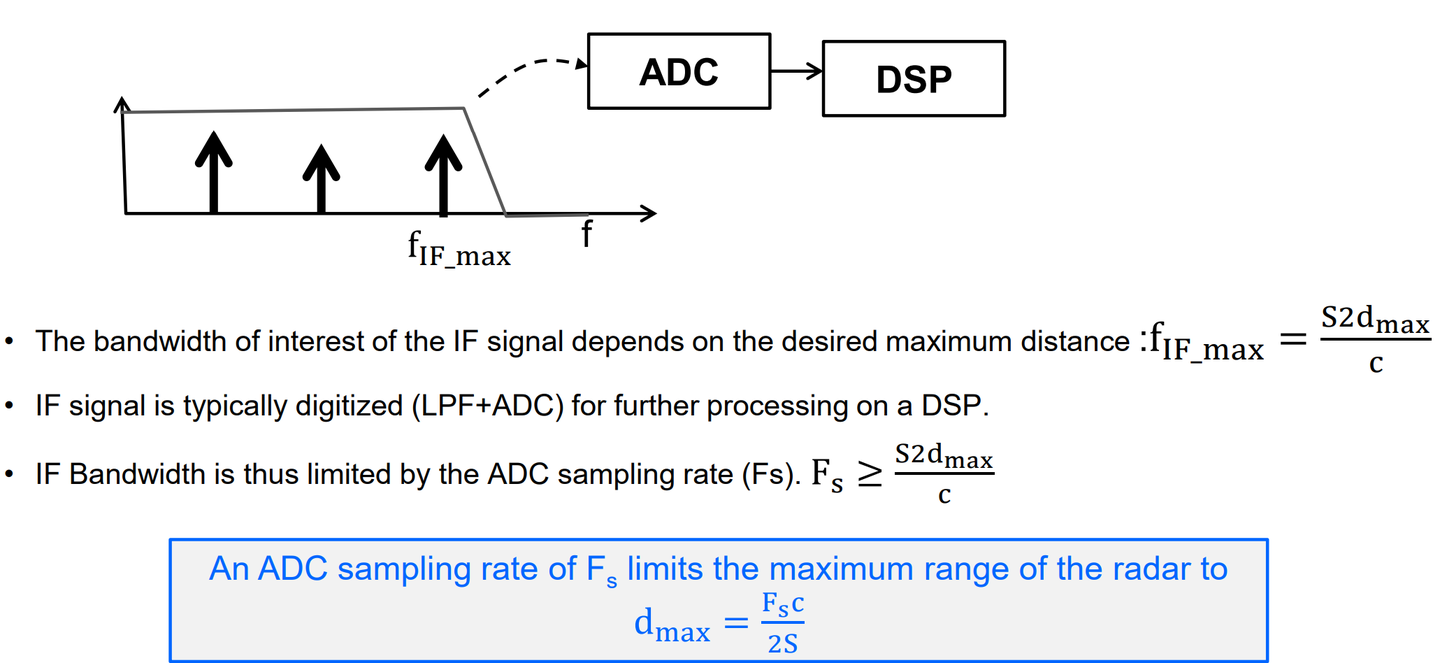
最大探测距离
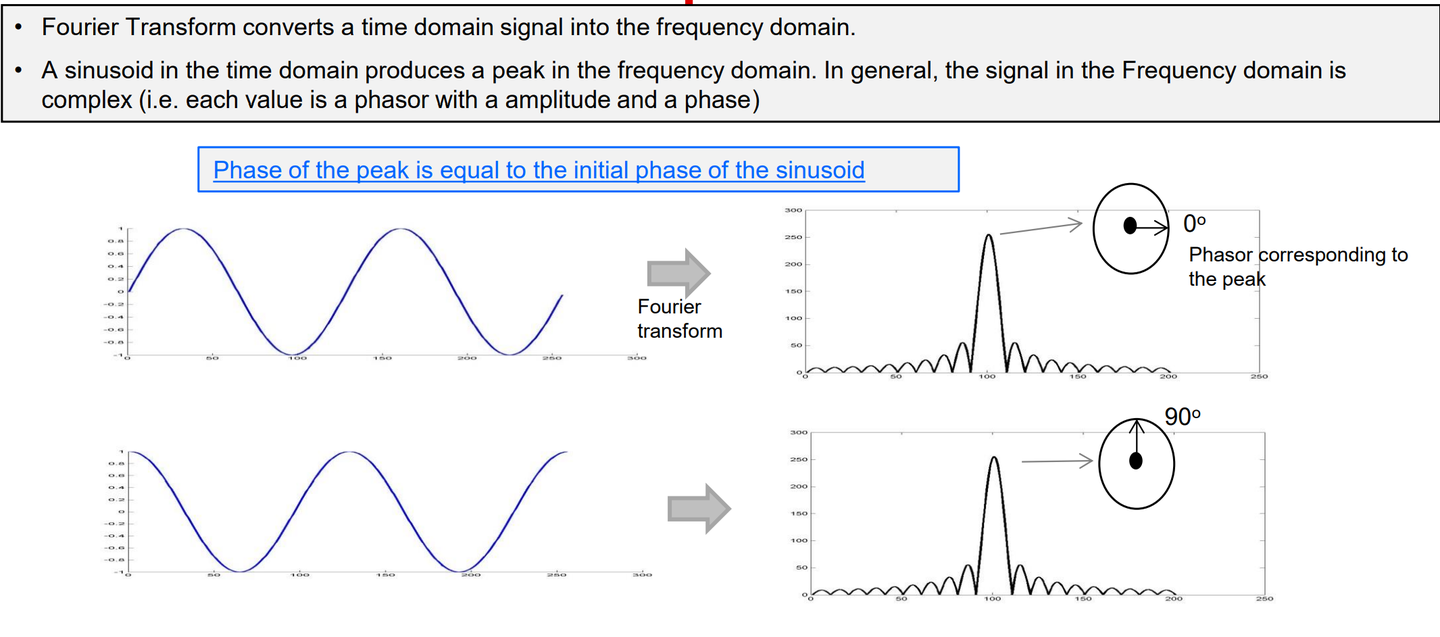
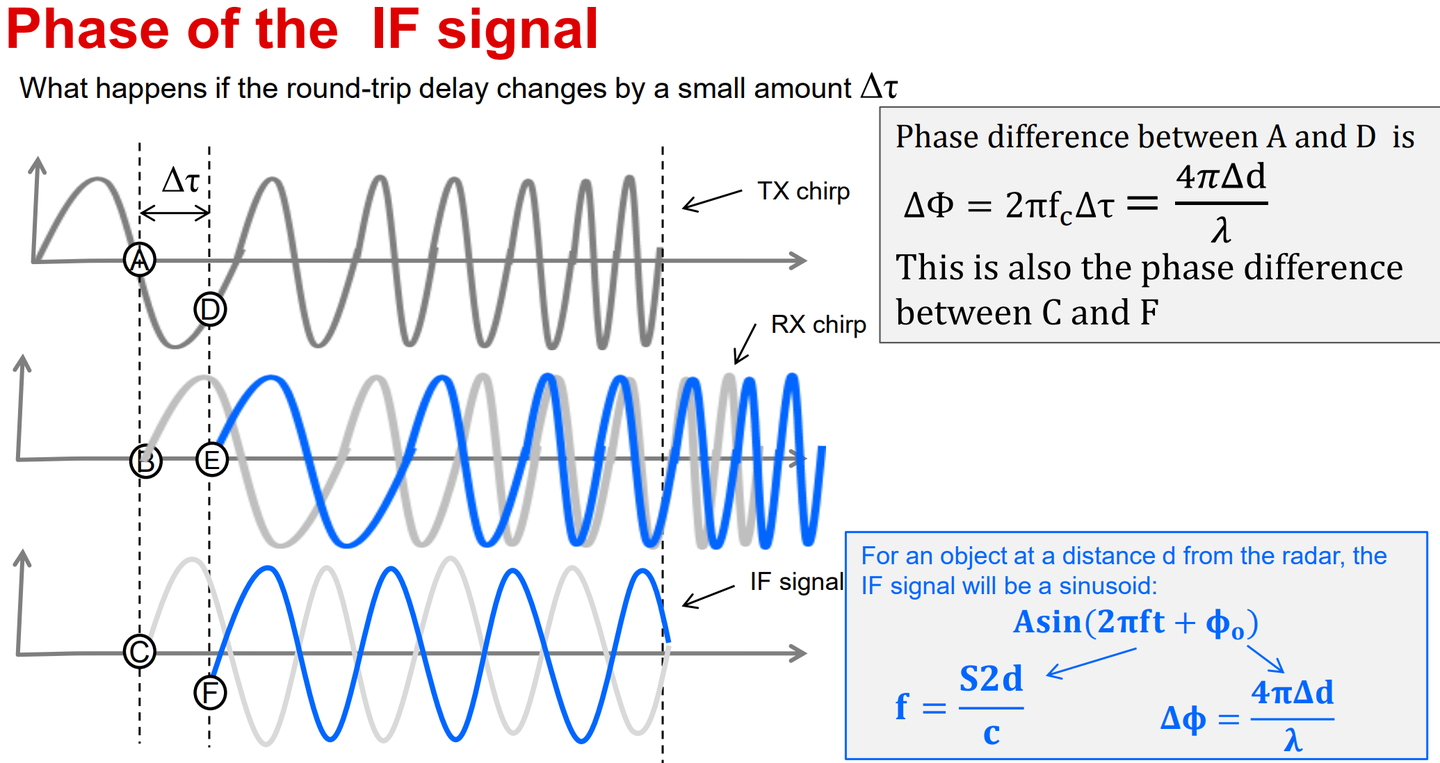
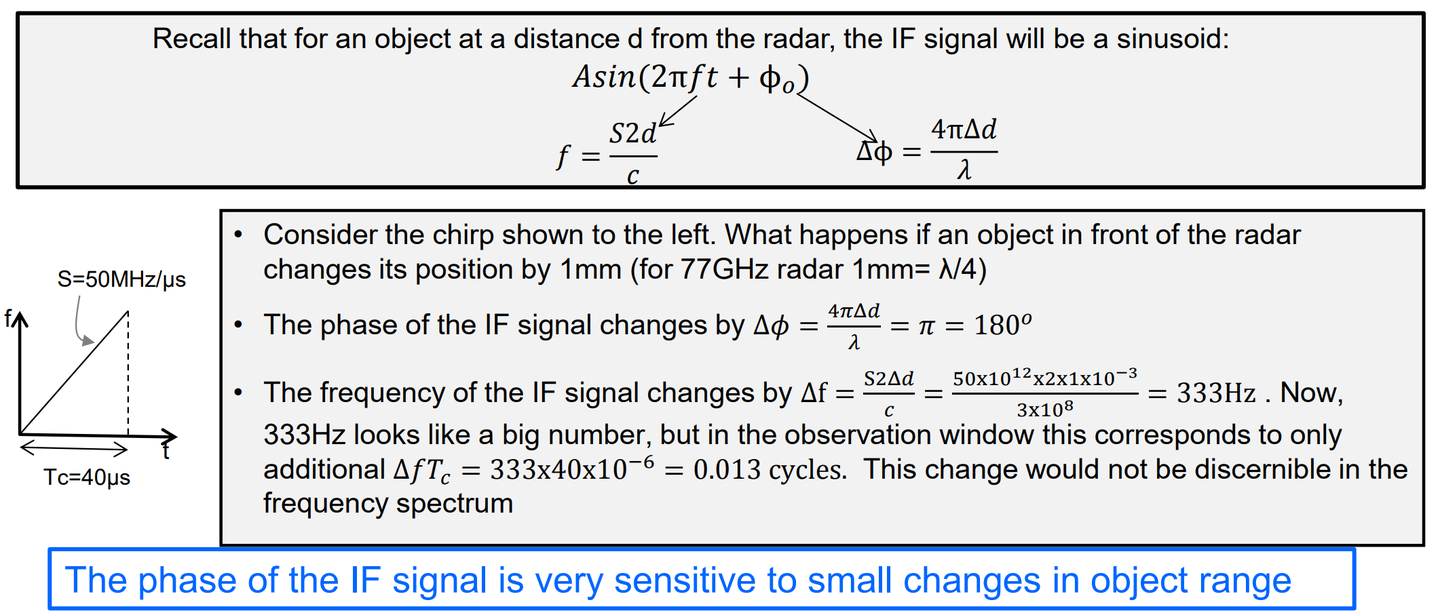
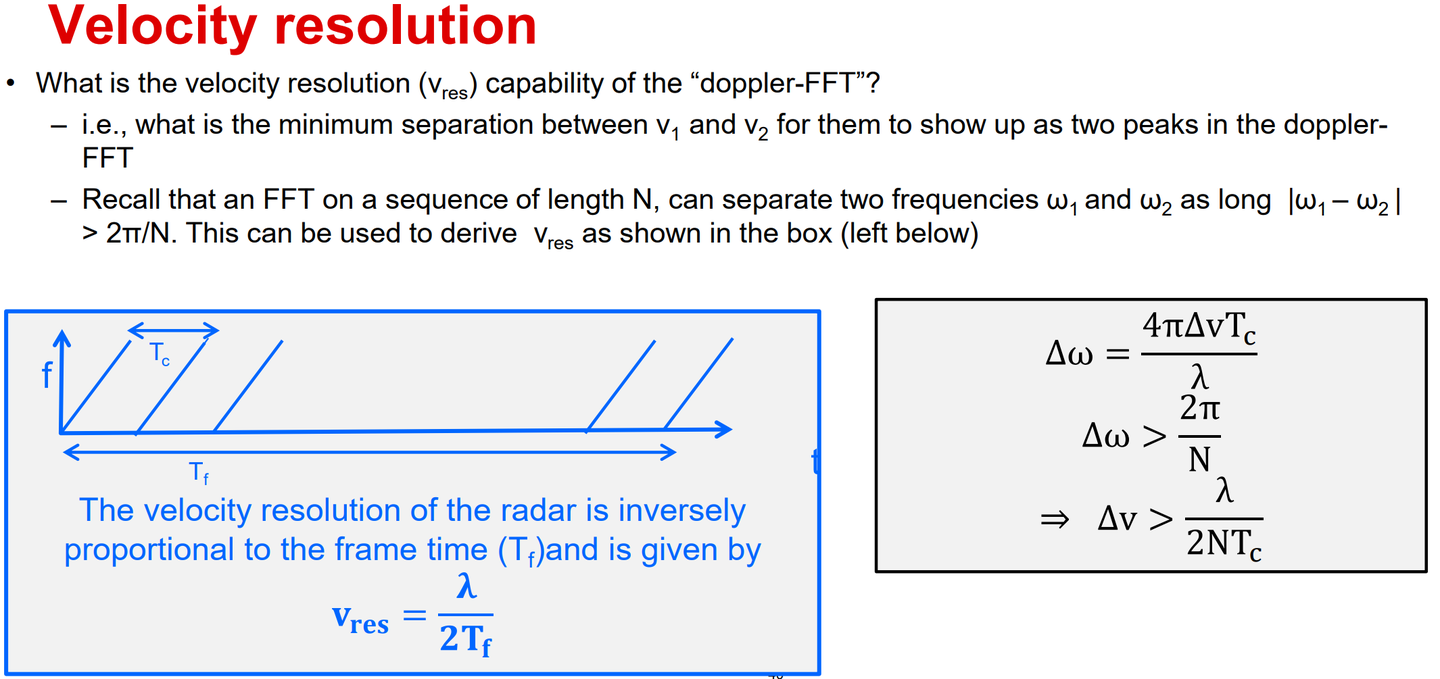
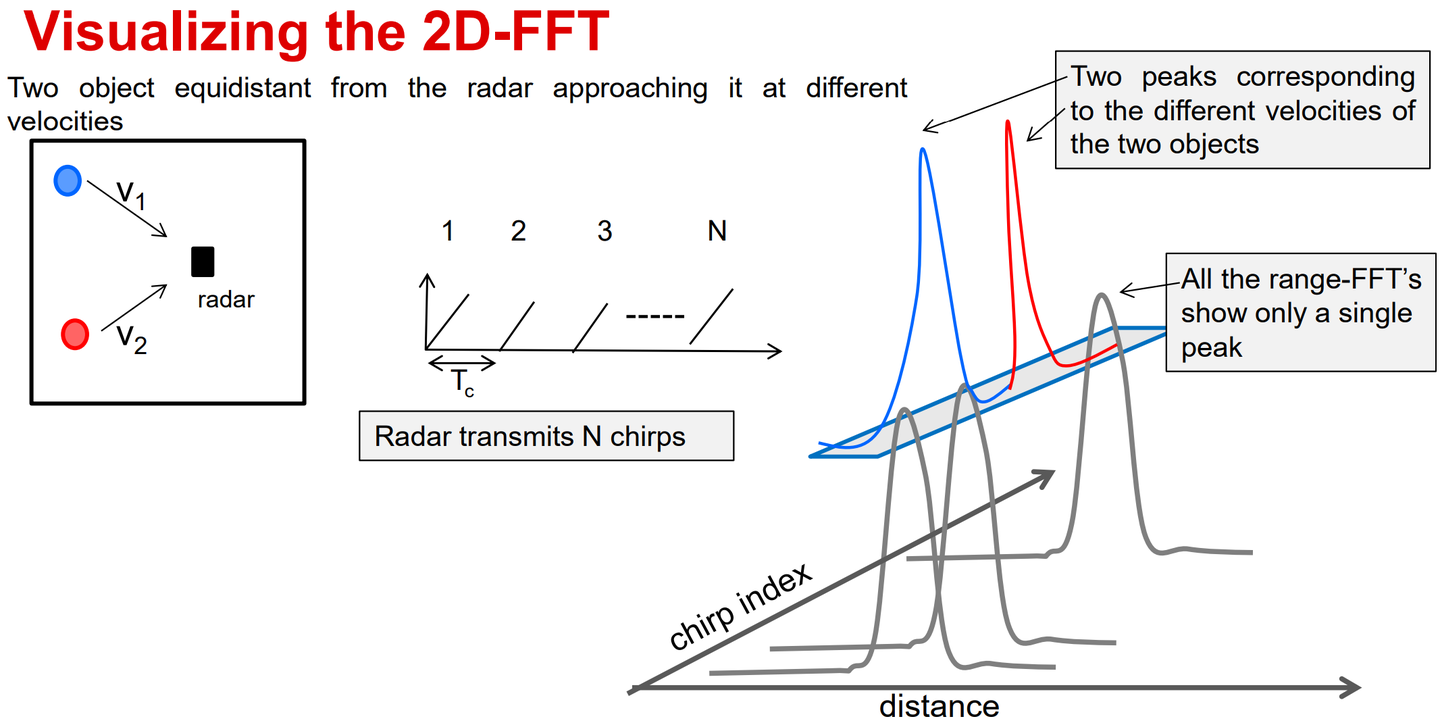
当目标存在相对速度时,这个速度在中频信号上,只能影响中频信号的相位变化,通过对IF相位变化的处理,可以得到目标的相对速度。
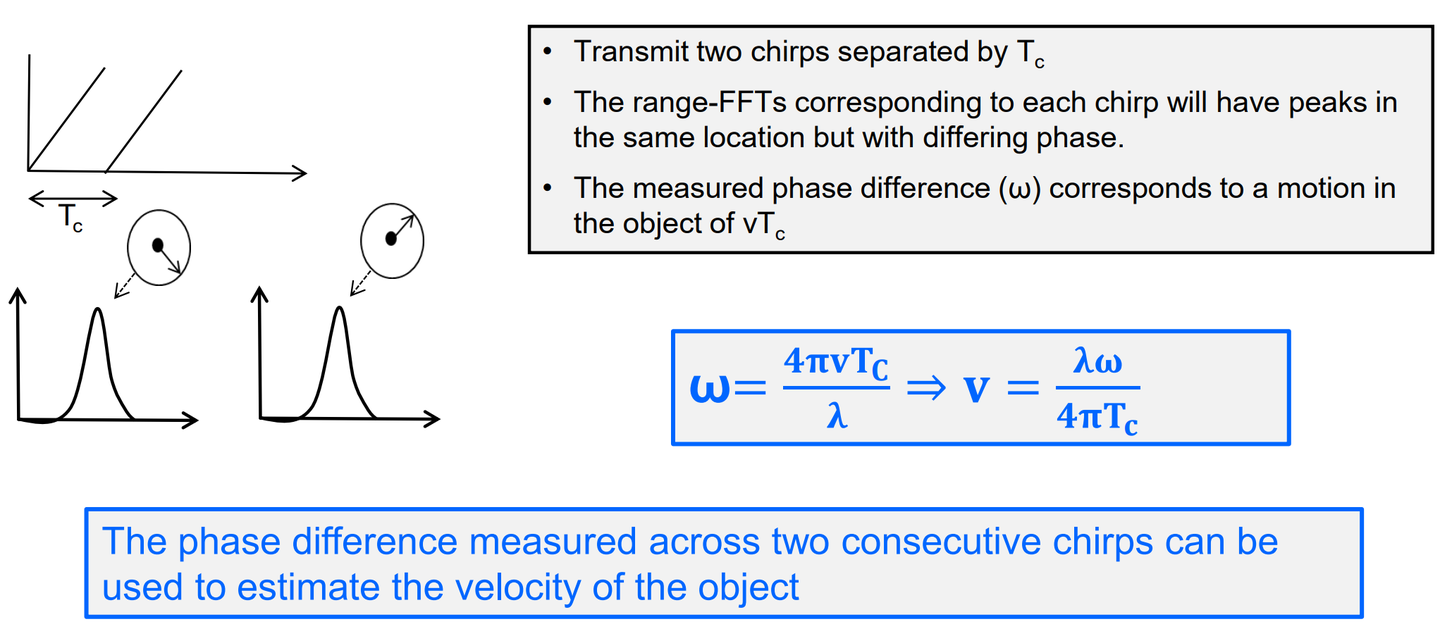
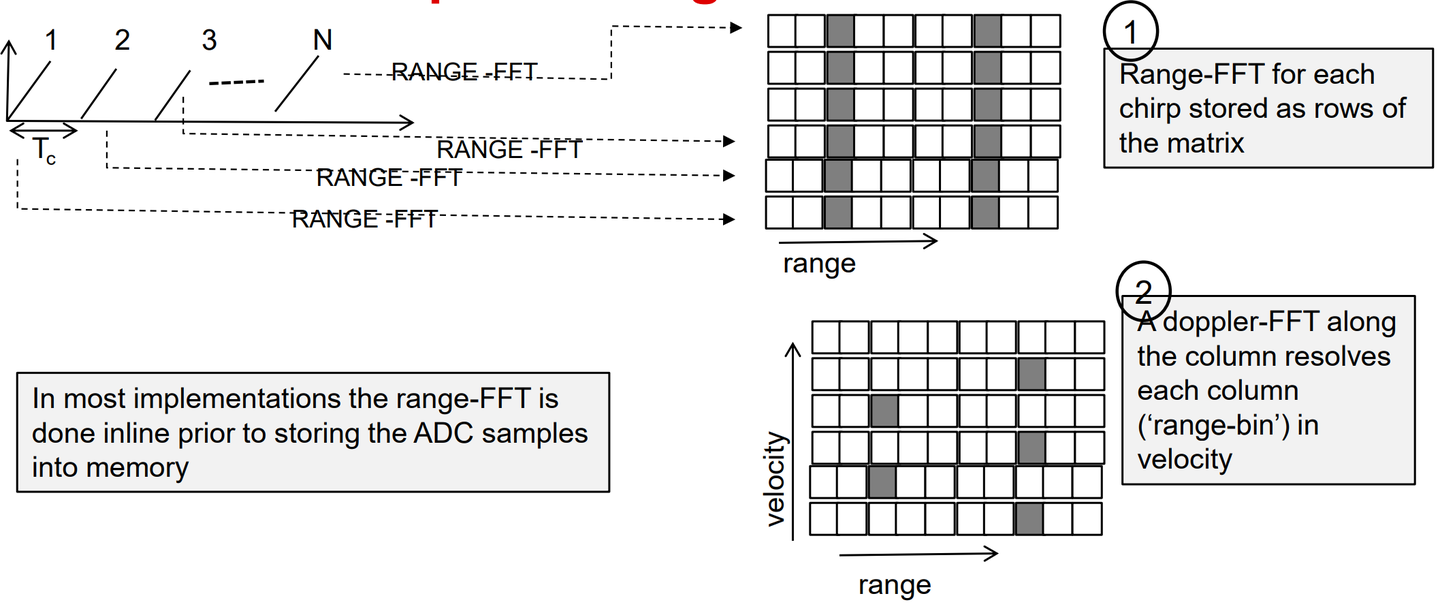
重复这些chirp,如下图
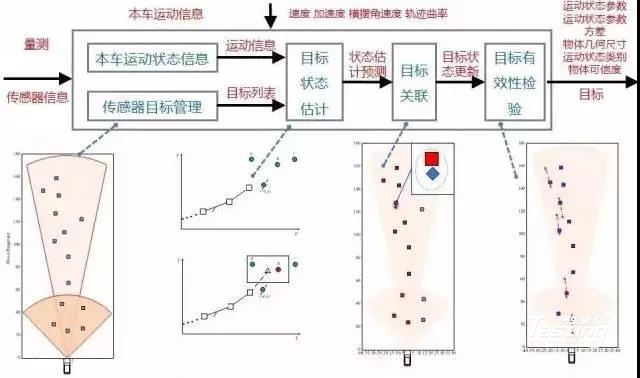
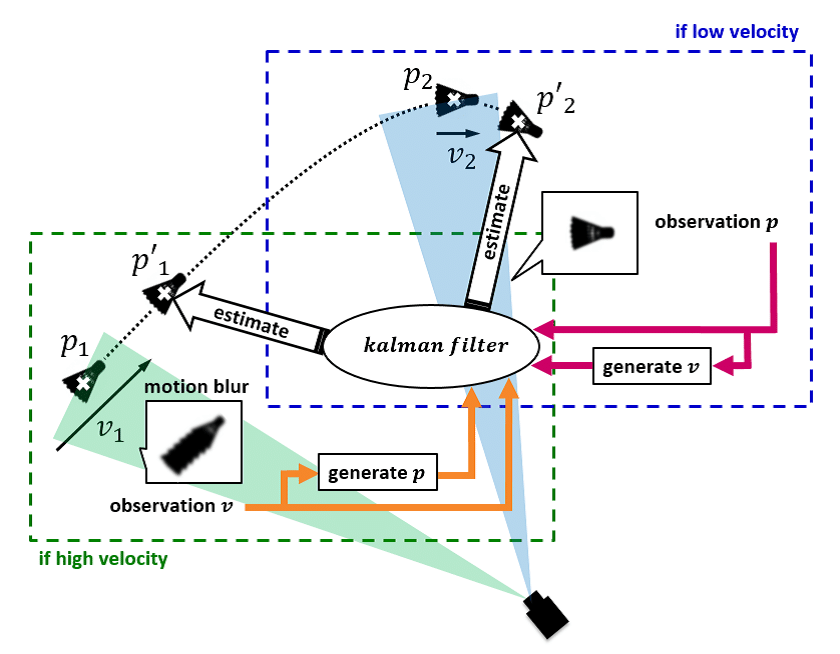
3、间接速度测量
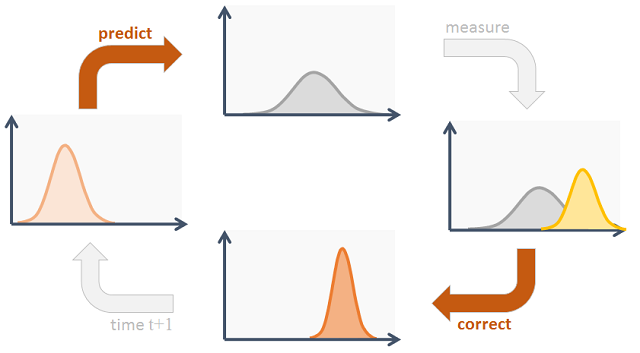
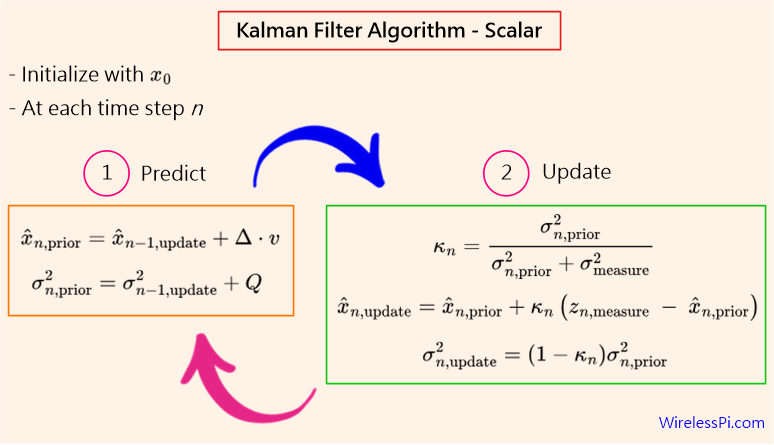
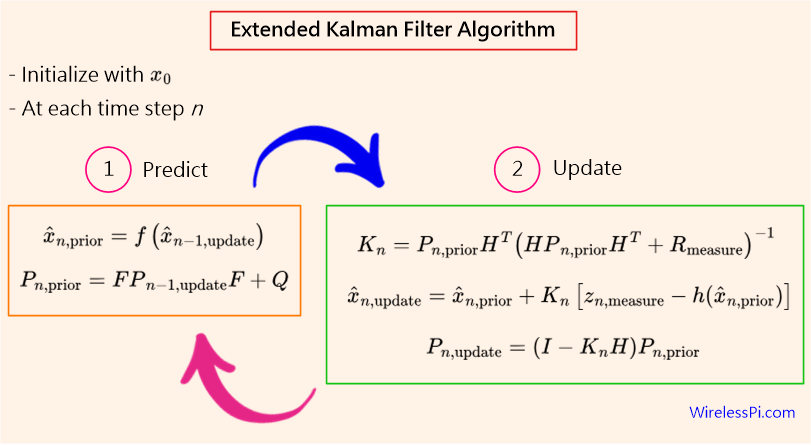
间接速度测量和卡尔曼滤波算法强相关,需要介绍一个kalman滤波算法
Ref:Object Tracking: Kalman Filter with Ease - CodeProject
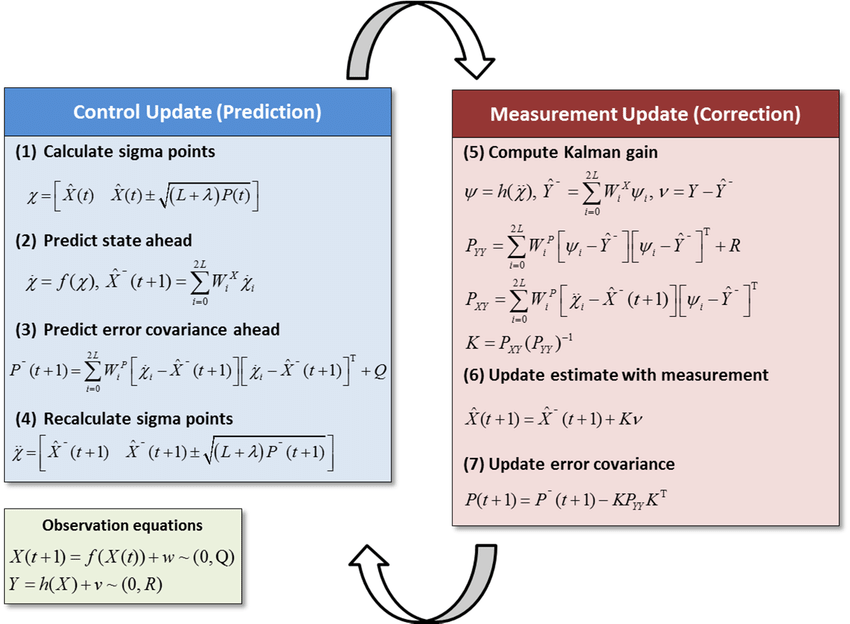
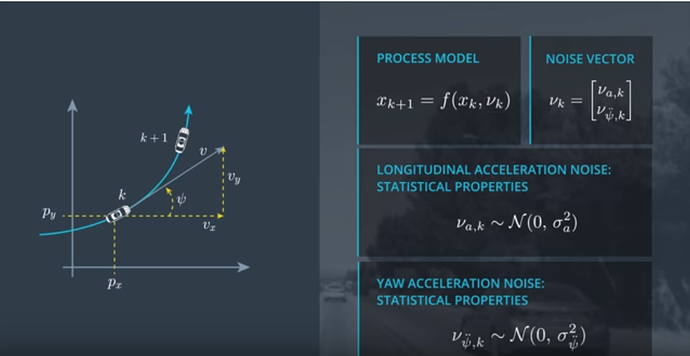
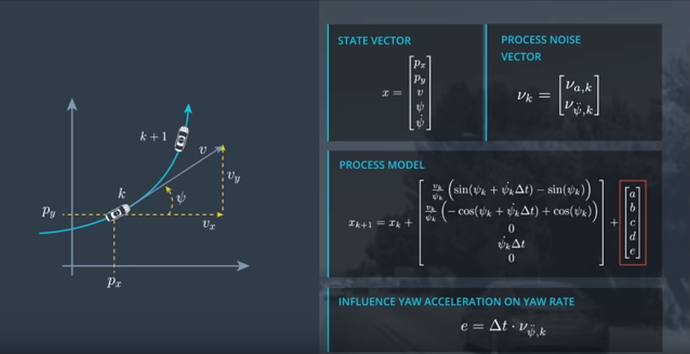
和Kalman 滤波相关的还有运动学模型,影响Kalman滤波中的运动状态更新公式的选取。
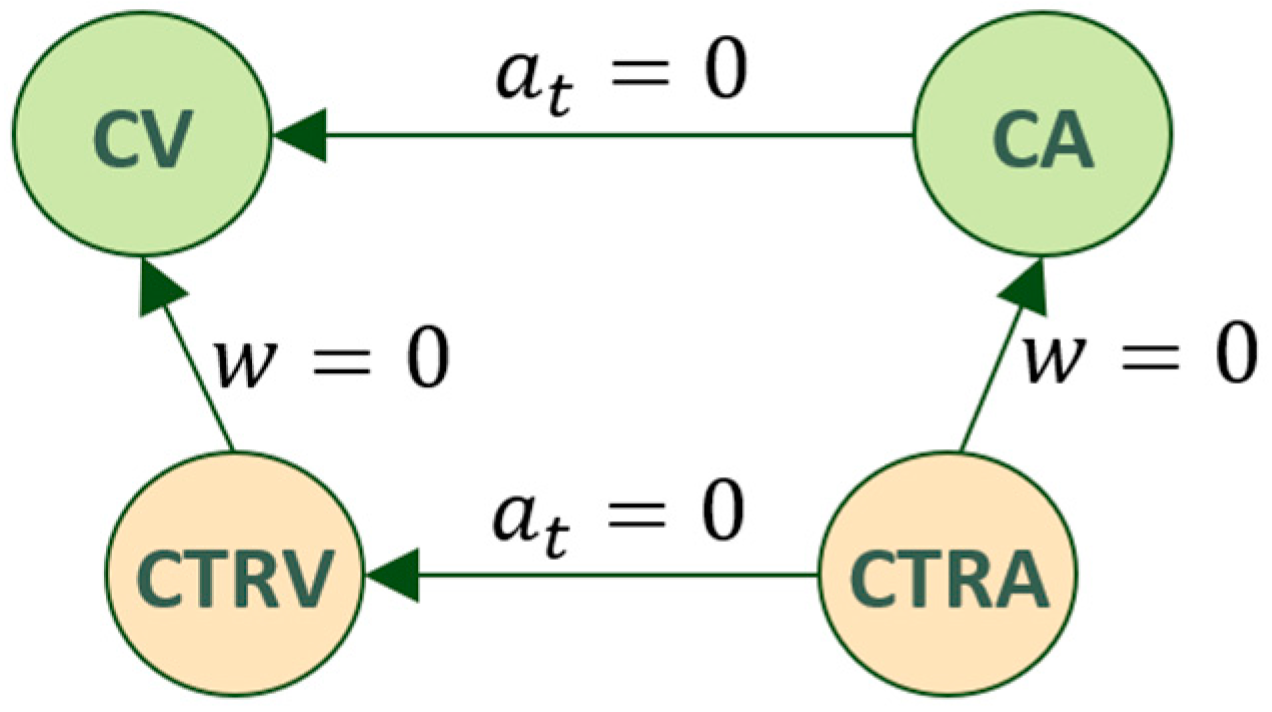
Ref:https://www.mdpi.com/1424-8220/22/15/5828
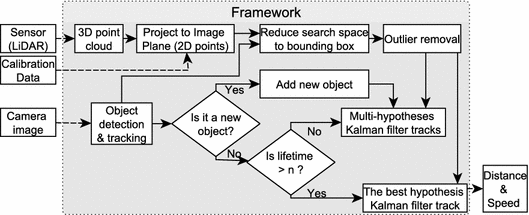
基于以上的,可以通过Lidar点云,识别得到运动目标,再对运动目标进行Kalman滤波,从而估计出运动目标的速度。
https://patents.google.com/patent/CN103901425A/zh
https://www.mdpi.com/1424-8220/24/23/7718
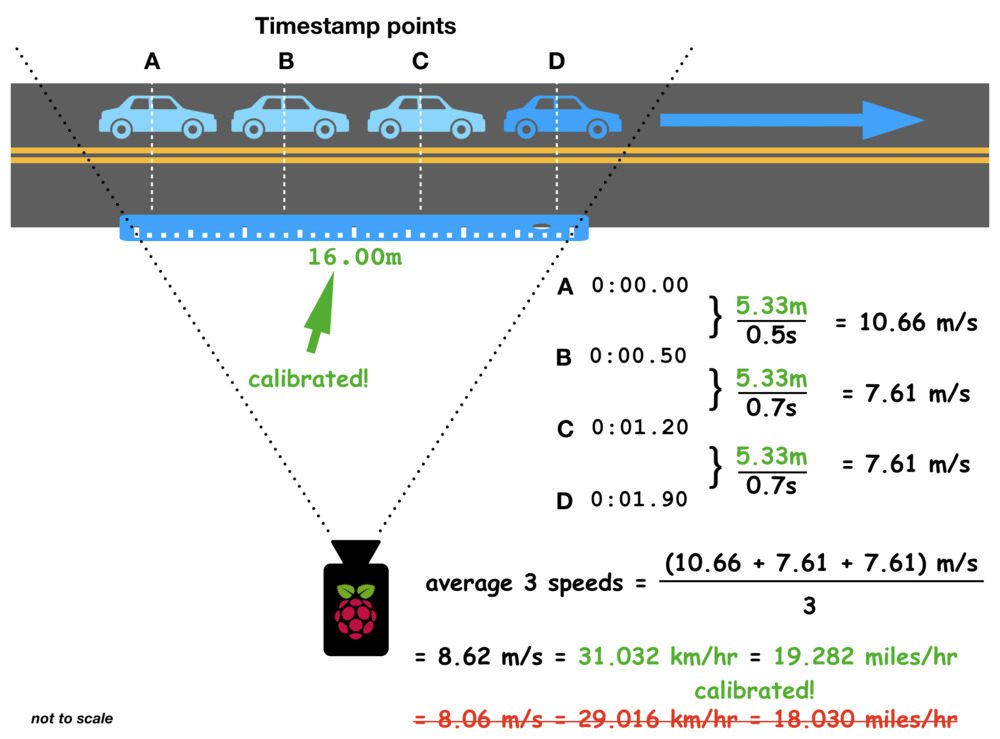
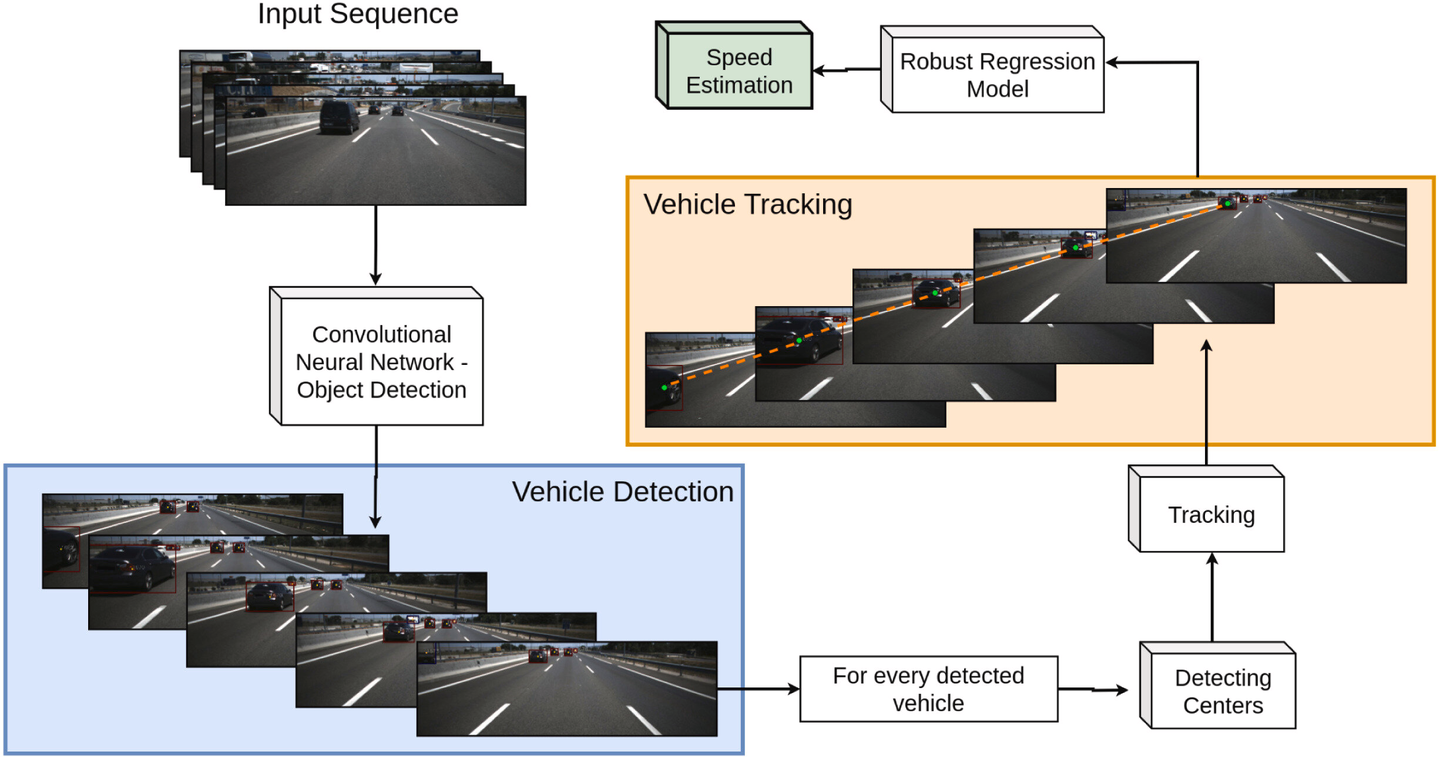
OpenCV Vehicle Detection, Tracking, and Speed Estimation - PyImageSearch
上图的方法,实际上是无法在实际的ADAS项目中应用的。
ResearchGate - Temporarily Unavailable
https://techxplore.com/news/2023-12-vision-vehicles-road-real-time.html
How to Estimate Speed with Computer Vision
How to Estimate Speed with lidar point
https://www.mdpi.com/1424-8220/23/23/9426
https://www.mathworks.com/help/fusion/ug/track-vehicles-using-lidar.html
Target Position and Speed Estimation Using LiDAR | SpringerLink