在多无人机系统的协同控制中,编队飞行能够显著提升任务执行的效率与鲁棒性。其中,V 字形编队因其空气动力学优势和通信结构的简洁性,在编队研究中具有代表性。然而,面对动态环境和障碍物约束,如何实现可重构的 V 字形编队仍是一个具有挑战性的问题。本文提出了一种基于局部行为规则与全局目标引导的可重构 V 字形编队控制方法。该方法首先建立了包含起点、终点与障碍物的仿真场景,并利用层级化的行为设计实现无人机在保持相对间距的同时,能够绕避障碍并重新形成稳定的 V 字形结构。为了评估编队的一致性和稳定性,本文引入了熵度量、队形误差和航向一致性等指标。仿真结果表明,该方法能够在复杂环境中保持编队的稳定性和可重构性,为多无人机系统的编队飞行与任务协同提供了一种有效的解决方案。
作者:张家梁(自研改进)
引言
近年来,多无人机系统(Multi-UAV Systems, MUS)在军事侦察、环境监测、应急救援和物流运输等任务中得到了广泛关注。与单机执行任务相比,多机协同能够在更短时间内完成更大范围、更复杂的任务,其关键在于如何设计有效的编队控制策略。在众多编队形态中,V 字形结构因其在自然界鸟群飞行中的普遍存在而受到研究者的青睐。一方面,该结构能够有效降低空气动力学阻力,提升整体飞行效率;另一方面,其对称布局和局部规则也为保持通信与相对位置提供了便利。
尽管已有大量关于编队控制的研究成果,但在动态环境下实现可重构的 V 字形编队仍存在挑战。首先,障碍物的存在会迫使无人机打破原有队形,如何在绕障的同时保持或快速恢复编队是一大难点。其次,不同无人机间可能存在初始位置差异和航迹扰动,这要求控制方法具备较强的鲁棒性。最后,评价指标往往仅关注位置误差,而缺乏对队形整体一致性的全面量化。
针对上述问题,本文的主要工作包括:(1)提出一种场景化的仿真框架,支持无人机在复杂环境下的编队飞行研究;(2)设计一种可重构的 V 字形编队控制方法,结合全局目标引导与局部行为规则,实现绕障与重组;(3)引入熵度量、平均队形误差与航向一致性等指标,对编队的稳定性与协调性进行综合评估。通过仿真实验,验证了该方法在动态环境中的有效性和适应性。
系统架构
1.系统概述
本文设计的可重构 V 型无人机编队系统整体上由三个核心模块构成:
场景建模模块
该模块用于建立无人机运行环境,包含起点与目标位置的设定、障碍物的建模以及空间边界的限定。同时,系统允许用户灵活配置无人机数量、期望间距和编队角度等参数,为后续的编队控制与性能评价提供基础数据。
编队控制模块
这是系统的核心部分。基于局部行为规则与全局目标引导相结合的方法,该模块实现无人机的自主避障、队形保持和动态重构。在飞行过程中,无人机能够在保持 V 型编队的同时规避环境中的障碍物,并在打乱后快速恢复稳定队形。
性能评估与可视化模块
该模块负责对编队运行效果进行评价和展示。通过熵度量、平均间距误差、航向一致性等指标,对编队的协调性和稳定性进行量化分析。同时,模块提供轨迹绘制、动画生成和视频输出功能,使实验结果更加直观。
整体而言,系统形成了一个从环境构建 → 编队控制 → 性能评估的完整闭环,既支持算法验证,也方便效果展示。。
2.系统流程图

研究方法
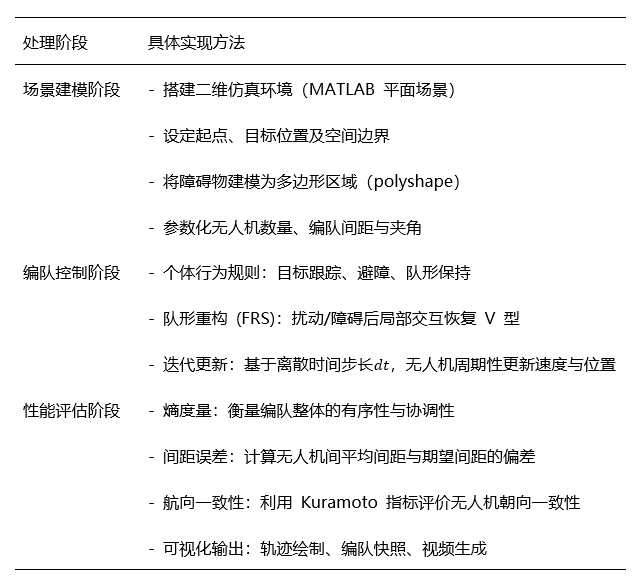
本文的研究方法包括场景建模、编队控制与性能评估三个阶段,分别通过环境构建、局部规则与重构策略实现无人机 V 型编队的形成与保持,并利用多指标综合评价系统性能。
实验结果
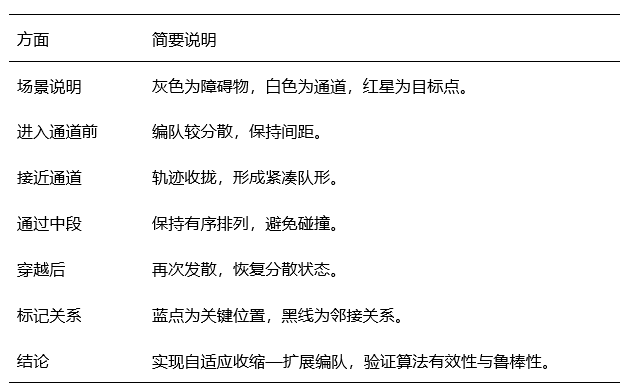
实验结果表明,无人机编队在狭窄通道中能够自适应收缩并保持有序通过,随后再次扩展,验证了控制与路径规划算法的有效性和鲁棒性。
实验结果
运行main.m
图1:无人机编队在狭窄通道中的轨迹演化图

分析:该图展示了 5 架无人机在障碍环境中保持编队飞行的轨迹。通过轨迹和连线可以看出,无人机在狭窄区域自动收紧队形,安全穿越瓶颈后再恢复原有编队。这反映了路径规划和编队控制算法的有效性。
运行Metric.m
图1:系统有序度随时间变化曲线
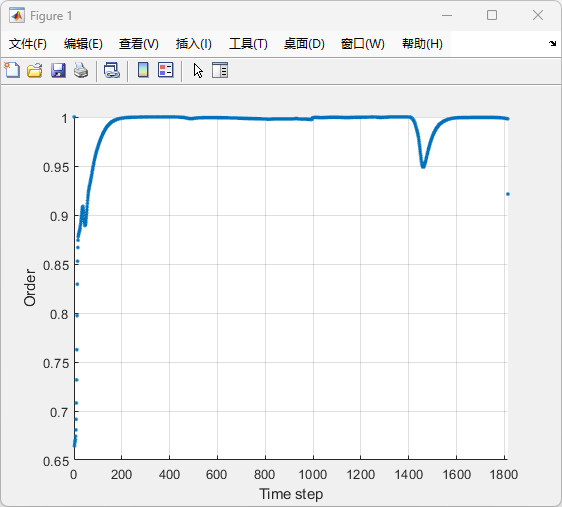
分析:随着时间步的增加,无人机群体有序度迅速上升并趋近于 1,在约 1400 步时虽出现短暂波动但很快恢复,整体表现出良好的收敛性与稳定性。
图2:无人机间相对距离随时间变化曲线
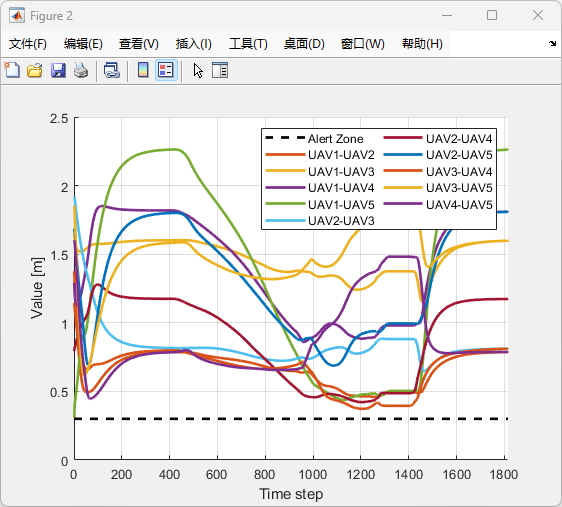
分析:各曲线表示不同无人机对之间的相对距离,大部分时间均高于安全阈值,但在 600–1200 步间多条曲线接近
图3:无人机间距分布箱线图
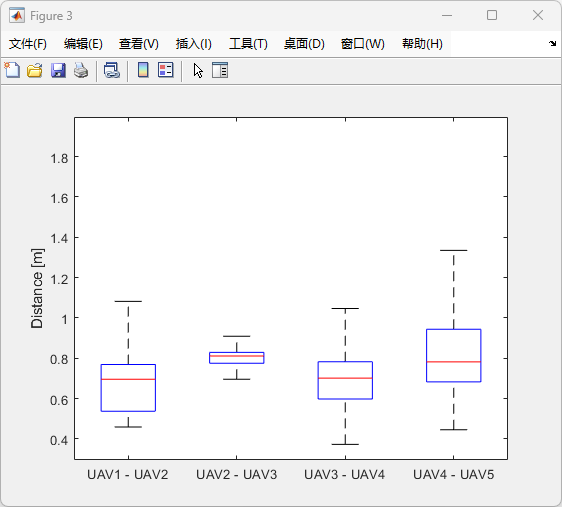
分析:横轴为不同无人机对、纵轴为距离分布,大多数中位数在 0.7–0.9 米之间,整体保持较合理间距,其中 UAV2–UAV3 分布较集中、距离稳定,而 UAV4–UAV5 分布范围更大,间距不确定性更高。
图4:平均误差随时间变化曲线
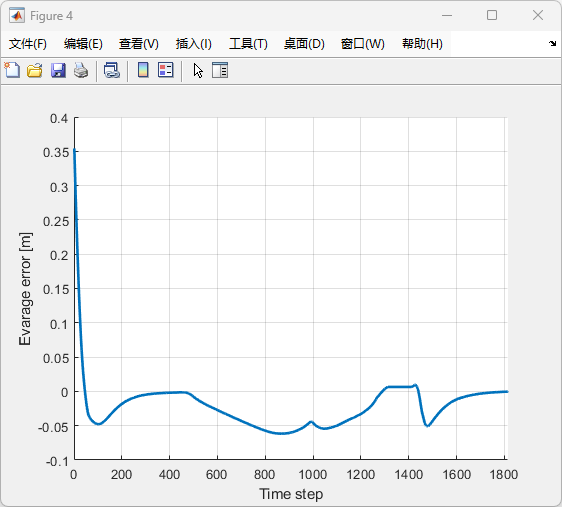
分析:初始误差较大(约 0.35 m)但迅速下降并在 0 附近波动,在 600–1200 步及约 1400 步时出现与图2风险区域相呼应的波动,整体误差较小,表明控制算法有效但局部仍有优化空间。
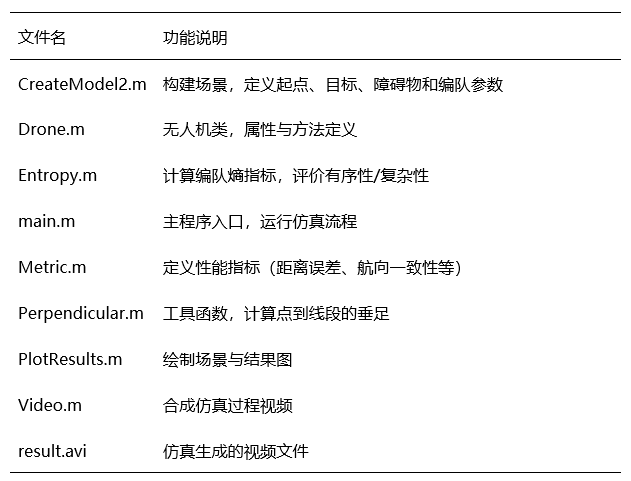
系统实现
本系统完全基于MATLAB平台开发,主要集成以下脚本与模块:
研究结论
本研究表明,所提出的无人机编队控制与路径规划方法能够使群体在运行过程中迅速达到并保持高有序度,整体表现出良好的收敛性与稳定性;多数无人机对之间的距离处于安全阈值之上,但在部分时段仍存在接近或低于警戒值的潜在碰撞风险,其中 UAV4 与 UAV5 的波动相对较大;平均误差快速下降并在零附近波动,验证了控制算法的有效性,同时局部误差波动与距离风险区相呼应;在狭窄通道实验中,无人机编队实现了自适应的收缩—扩展过程,能够在复杂环境中保持紧凑有序并顺利通过,最终恢复至分散状态,充分证明了该方法在稳定性、安全性和鲁棒性方面的优越性。
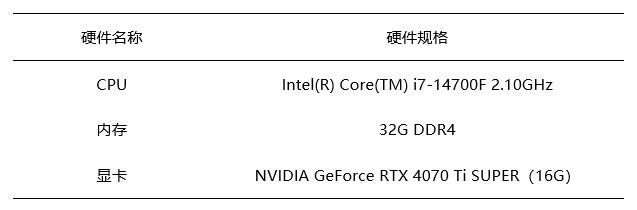
实验环境
硬件配置如表:实验所用硬件平台为惠普(HP)暗影精灵10台式机整机,运行 Windows 11 64 位操作系统,作为模型训练与测试的主要计算平台,能够良好支持Matlab的开发需求。
官方声明
实验环境真实性与合规性声明:
本研究所使用的硬件与软件环境均为真实可复现的配置,未采用虚构实验平台或虚拟模拟环境。实验平台为作者自主购买的惠普(HP)暗影精灵 10 台式整机,具体硬件参数详见表。软件环境涵盖操作系统、开发工具、深度学习框架、MATLAB工具等,具体配置详见表,所有软件组件均来源于官方渠道或开源社区,并按照其许可协议合法安装与使用。
研究过程中严格遵循学术诚信和实验可复现性要求,确保所有实验数据、训练过程与结果均可在相同环境下被重复验证,符合科研规范与工程实践标准。
版权声明:
本算法改进中涉及的文字、图片、表格、程序代码及实验数据,除特别注明外,均由7zcode.张家梁独立完成。未经7zcode官方书面许可,任何单位或个人不得擅自复制、传播、修改、转发或用于商业用途。如需引用本研究内容,请遵循学术规范,注明出处,并不得歪曲或误用相关结论。
本研究所使用的第三方开源工具、框架及数据资源均已在文中明确标注,并严格遵守其相应的开源许可协议。使用过程中无违反知识产权相关法规,且全部用于非商业性学术研究用途。