定义
树也是基于节点的数据结构,和链表不同的是,树的节点可以指向多个节点。首先对树的一些常用术语进行说明:
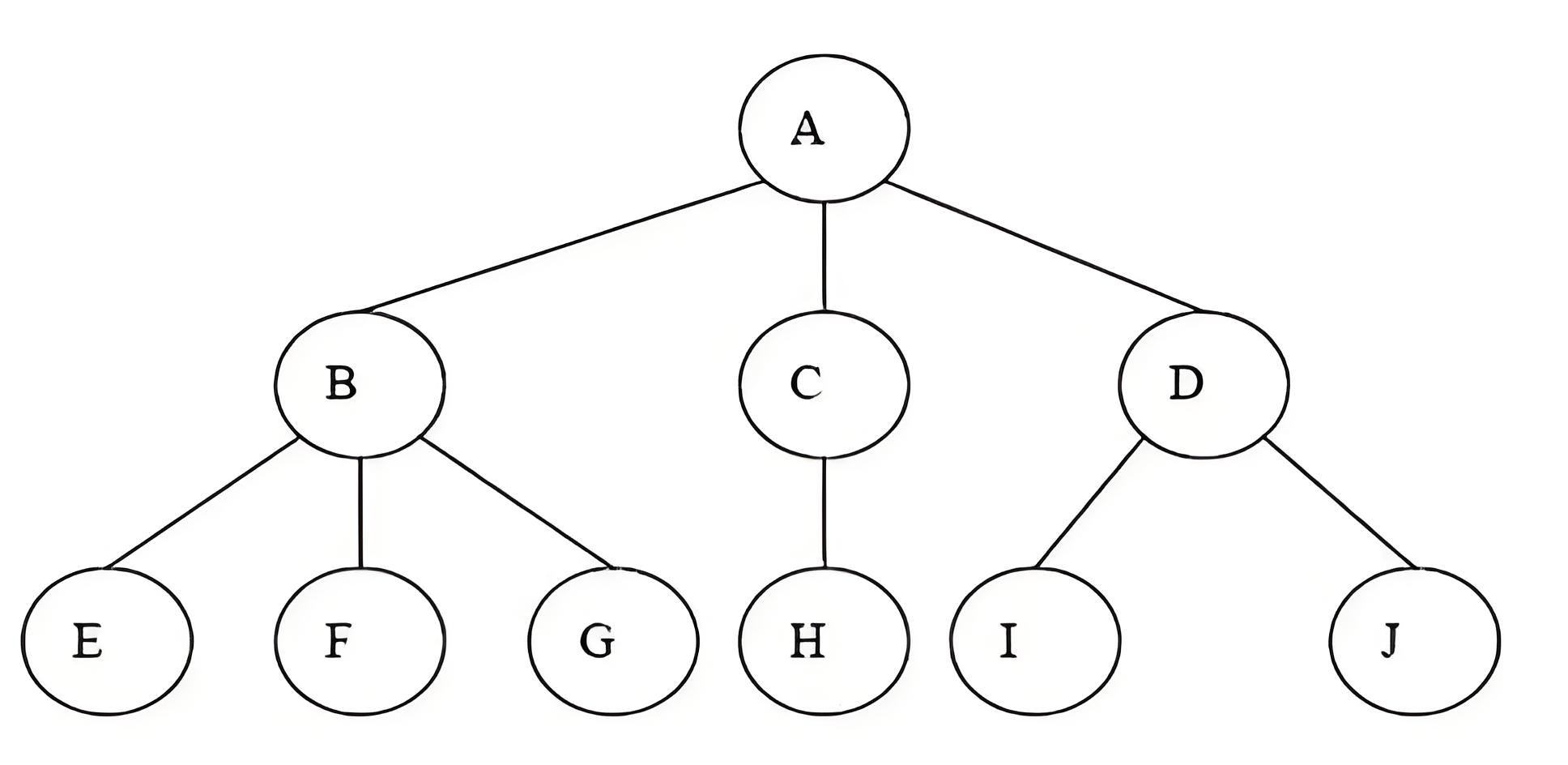
- 最上面的节点叫做根节点,根位于树顶,如图中的节点A;
- 和族谱一样,节点有后代和祖先;节点的后代即起源于该节点的全部节点,祖先即可以派生出该节点的节点;
- 树有层级,每一层都是树的一行,如上图,树有三层;
- 树的一个属性是它是否平衡,即如果子树中的节点数量相同,则这棵树是平衡的,上图中的树就是不平衡的;
二叉查找树
二叉查找树也是树的一种,其特征如下:
- 每个节点最多有一个左子节点和右子节点
- 一个节点的左子树中的值都小于节点本身,同时右子树中的值都大于节点本身;

实现
二叉树实现如下:
#include <iostream>
#include <memory>
// 二叉树节点类
template <typename T>
class TreeNode {
public:
T data;
std::shared_ptr<TreeNode<T>> left;
std::shared_ptr<TreeNode<T>> right;
TreeNode(T value) : data(value), left(nullptr), right(nullptr) {}
};二叉树查找
二叉树查找步骤如下:
- 以根节点为当前节点;
- 读取当前节点数值;
- 如果当前数值为要查找的数值,则停止查找并返回;
- 如果当前值大于要查找的数值,则在其左子树中继续查找;
- 如果当前值小于要查找的数值,则在右子树中继续查找;
- 重复1-5步,直到找到对应数值,或者到达了树的底端,即数值不在该树中;
注意观察可以发现,每次查找都会排除大约一半的节点,因此可以推测二叉查找树的查找效率为O(),之所以说大约为这个效率,是因为只有二叉查找树的每一行节点都填满(即是一棵平衡二叉树),则上述特性才成立即:如果一棵平衡的二叉树中有N个节点,则就会有大约logN层。代码实现如下:
bool searchRecursive(std::shared_ptr<TreeNode<T>> node, T value) const {
if (!node) {
return false;
}
if (value == node->data) {
return true;
} else if (value < node->data) {
return searchRecursive(node->left, value);
} else {
return searchRecursive(node->right, value);
}
}二叉树插入
二叉树的插入是基于二叉树的查找,即找到要插入的位置后插入(方法同上述中的二叉树查找),其效率为O(logN)+1,代码实现如下:
// 递归插入节点
std::shared_ptr<TreeNode<T>> insertRecursive(std::shared_ptr<TreeNode<T>> node, T value) {
if (!node) {
return std::make_shared<TreeNode<T>>(value);
}
if (value < node->data) {
node->left = insertRecursive(node->left, value);
} else if (value > node->data) {
node->right = insertRecursive(node->right, value);
}
return node;
}二叉树删除
二叉树查找树的删除是最复杂的部分,其步骤如下:
- 如果要删除的节点没有子节点,那么就可以直接删除该节点;
- 如果要删除的节点有一个子节点,那么就在删除该节点的同时把子节点插到该节点的位置;
- 如果要删除的节点有两个子节点,则需要把要删除的节点替换为其后继节点,后继节点即大于被删除节点的所有子节点中最小的那个;
- 如果需要寻找后继节点,则需要先移动到被删除节点的右子节点,然后沿左节点的链接移动到左子结点,直到找不到任何左子结点为止,最下的这个值即后继节点;
- 如果后继节点有一个右子节点,则在将后继节点放置到被删除节点的位置之后,把这个右子节点变成后继节点曾经的父节点的左子结点。
删除的效率和插入以及查找类似,均为O(logN),代码如下:
// 查找最小节点
std::shared_ptr<TreeNode<T>> findMin(std::shared_ptr<TreeNode<T>> node) const {
while (node && node->left) {
node = node->left;
}
return node;
}
// 递归删除节点
std::shared_ptr<TreeNode<T>> deleteRecursive(std::shared_ptr<TreeNode<T>> node, T value) {
if (!node) {
return nullptr;
}
if (value < node->data) {
node->left = deleteRecursive(node->left, value);
} else if (value > node->data) {
node->right = deleteRecursive(node->right, value);
} else {
// 找到要删除的节点
if (!node->left) {
return node->right;
} else if (!node->right) {
return node->left;
}
// 有两个子节点的情况:找到右子树的最小节点替换当前节点
std::shared_ptr<TreeNode<T>> temp = findMin(node->right);
node->data = temp->data;
node->right = deleteRecursive(node->right, temp->data);
}
return node;
}遍历-前、中、后
二叉查询树的遍历,即访问所有节点,分类为三种:前序、中序、后序。其实这里的前、中、后针对的是调用遍历函数时的当前节点,前的意思就是先访问当前节点,再访问左、右子节点;中的意思就是先访问左子节点,再访问当前节点,最后访问右子节点;后的意思是先访问左、右子节点,最后访问本节点,其实现如下:
// 中序遍历(递归)
void inorderRecursive(std::shared_ptr<TreeNode<T>> node) const {
if (!node) return;
inorderRecursive(node->left);
std::cout << node->data << " ";
inorderRecursive(node->right);
}
// 前序遍历(递归)
void preorderRecursive(std::shared_ptr<TreeNode<T>> node) const {
if (!node) return;
std::cout << node->data << " ";
preorderRecursive(node->left);
preorderRecursive(node->right);
}
// 后序遍历(递归)
void postorderRecursive(std::shared_ptr<TreeNode<T>> node) const {
if (!node) return;
postorderRecursive(node->left);
postorderRecursive(node->right);
std::cout << node->data << " ";
}以上就是本节关于二叉查找树的全部内容,树还有很多形式,这里挑选比较常用、简单的树形结构来进行讲解,不过今后有了AI,这些数据结构和算法的实现将会比较简单,程序员更多地是理解原理以及优化。全部代码整理如下:
#include <iostream>
#include <memory>
// 二叉树节点类
template <typename T>
class TreeNode {
public:
T data;
std::shared_ptr<TreeNode<T>> left;
std::shared_ptr<TreeNode<T>> right;
TreeNode(T value) : data(value), left(nullptr), right(nullptr) {}
};
// 二叉查找树类
template <typename T>
class BinarySearchTree {
private:
std::shared_ptr<TreeNode<T>> root;
// 递归插入节点
std::shared_ptr<TreeNode<T>> insertRecursive(std::shared_ptr<TreeNode<T>> node, T value) {
if (!node) {
return std::make_shared<TreeNode<T>>(value);
}
if (value < node->data) {
node->left = insertRecursive(node->left, value);
} else if (value > node->data) {
node->right = insertRecursive(node->right, value);
}
return node;
}
// 递归查找节点
bool searchRecursive(std::shared_ptr<TreeNode<T>> node, T value) const {
if (!node) {
return false;
}
if (value == node->data) {
return true;
} else if (value < node->data) {
return searchRecursive(node->left, value);
} else {
return searchRecursive(node->right, value);
}
}
// 查找最小节点
std::shared_ptr<TreeNode<T>> findMin(std::shared_ptr<TreeNode<T>> node) const {
while (node && node->left) {
node = node->left;
}
return node;
}
// 递归删除节点
std::shared_ptr<TreeNode<T>> deleteRecursive(std::shared_ptr<TreeNode<T>> node, T value) {
if (!node) {
return nullptr;
}
if (value < node->data) {
node->left = deleteRecursive(node->left, value);
} else if (value > node->data) {
node->right = deleteRecursive(node->right, value);
} else {
// 找到要删除的节点
if (!node->left) {
return node->right;
} else if (!node->right) {
return node->left;
}
// 有两个子节点的情况:找到右子树的最小节点替换当前节点
std::shared_ptr<TreeNode<T>> temp = findMin(node->right);
node->data = temp->data;
node->right = deleteRecursive(node->right, temp->data);
}
return node;
}
// 中序遍历(递归)
void inorderRecursive(std::shared_ptr<TreeNode<T>> node) const {
if (!node) return;
inorderRecursive(node->left);
std::cout << node->data << " ";
inorderRecursive(node->right);
}
// 前序遍历(递归)
void preorderRecursive(std::shared_ptr<TreeNode<T>> node) const {
if (!node) return;
std::cout << node->data << " ";
preorderRecursive(node->left);
preorderRecursive(node->right);
}
// 后序遍历(递归)
void postorderRecursive(std::shared_ptr<TreeNode<T>> node) const {
if (!node) return;
postorderRecursive(node->left);
postorderRecursive(node->right);
std::cout << node->data << " ";
}
public:
BinarySearchTree() : root(nullptr) {}
// 插入值
void insert(T value) {
root = insertRecursive(root, value);
}
// 查找值
bool search(T value) const {
return searchRecursive(root, value);
}
// 删除值
void remove(T value) {
root = deleteRecursive(root, value);
}
// 中序遍历
void inorder() const {
std::cout << "中序遍历: ";
inorderRecursive(root);
std::cout << std::endl;
}
// 前序遍历
void preorder() const {
std::cout << "前序遍历: ";
preorderRecursive(root);
std::cout << std::endl;
}
// 后序遍历
void postorder() const {
std::cout << "后序遍历: ";
postorderRecursive(root);
std::cout << std::endl;
}
// 判断树是否为空
bool isEmpty() const {
return root == nullptr;
}
};
// 示例用法
int main() {
BinarySearchTree<int> bst;
// 插入一些值
bst.insert(50);
bst.insert(30);
bst.insert(20);
bst.insert(40);
bst.insert(70);
bst.insert(60);
bst.insert(80);
// 遍历二叉树
bst.inorder();
bst.preorder();
bst.postorder();
// 搜索值
std::cout << "搜索 40: " << (bst.search(40) ? "找到" : "未找到") << std::endl;
std::cout << "搜索 90: " << (bst.search(90) ? "找到" : "未找到") << std::endl;
// 删除值
std::cout << "\n删除 20\n";
bst.remove(20);
bst.inorder();
std::cout << "删除 30\n";
bst.remove(30);
bst.inorder();
std::cout << "删除 50\n";
bst.remove(50);
bst.inorder();
return 0;
}