文章目录
一.插入排序
插入排序一般分为两种: 1.直接插入排序 2.希尔排序
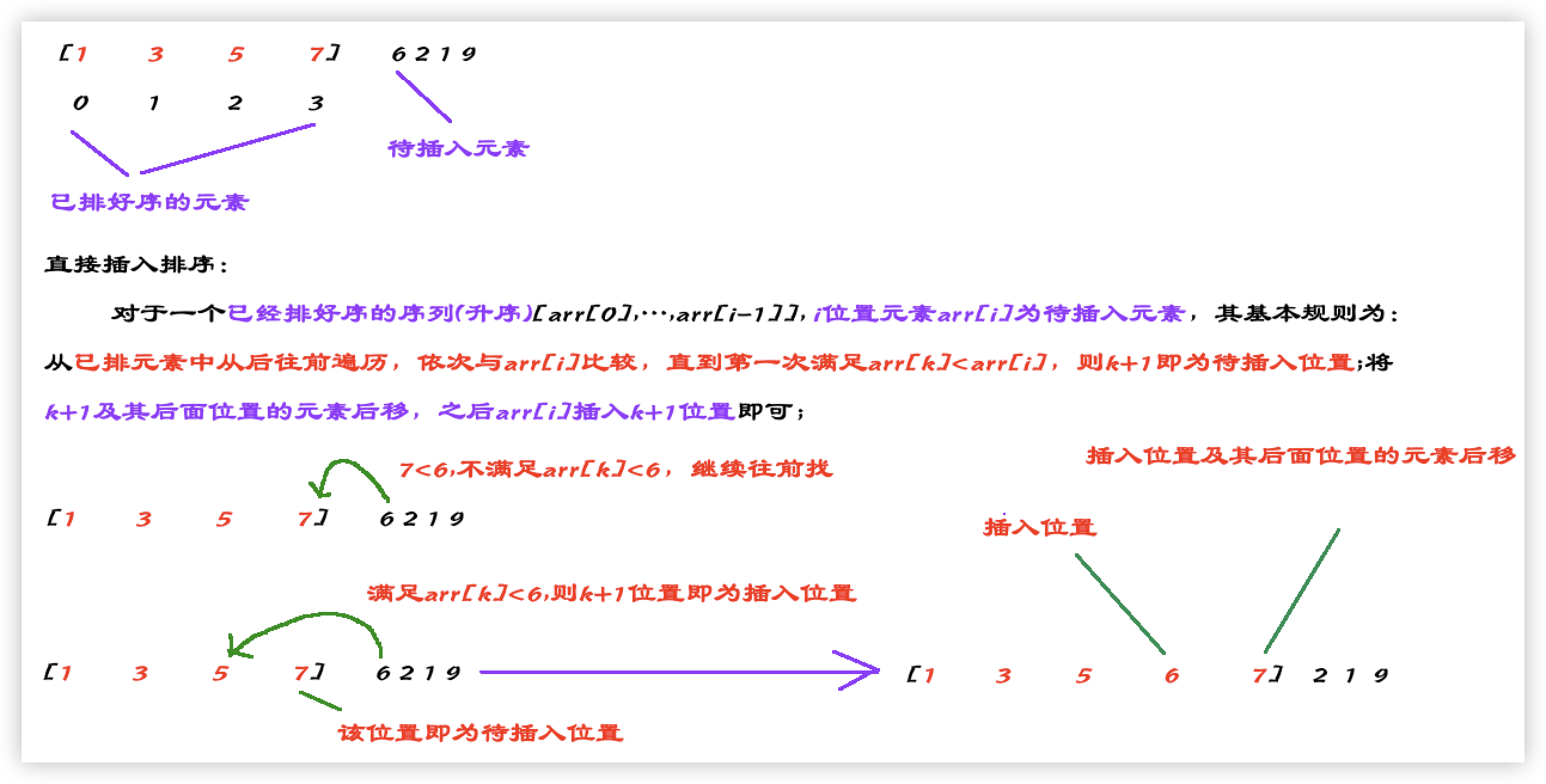
1.1 直接插入排序
对于一个数组,假设[arr[0],…,arr[i-1]]是排好序的,待排位置为arr[i],从后往前依次和待排部分元素比较,直到找到待插入位置,之后将原位置及其后面的元素后移即可,之后不断重复即可;
代码示例:
public class InsertSort {
public static void insertSort(int[] arr) {
int i=0,j=0,tmp=0,n=arr.length;
if(n==0||n==1) return ;
for(i=1;i<n;i++) {
//i位置为待插入元素
tmp=arr[i];
//tmp与[0,i-1]元素依次比较,且比较过程直接移动元素
for(j=i-1;j>=0&&arr[j]>tmp;j--) {
arr[j+1]=arr[j];
}
arr[j+1]=tmp;
}
}
public static void main(String[] args) {
int[] arr=new int[]{9,8,7,6,5,4,3,2,1};
insertSort(arr);
for(int x:arr)
System.out.print(x+" ");
}
}
直接插入排序的特点:
- 直接插入排序是一种稳定的排序算法
- 直接插入排序的数组越有序,排序效率越高
- 直接插入排序的时间复杂度为O(n^2),空间复杂度为O(1)
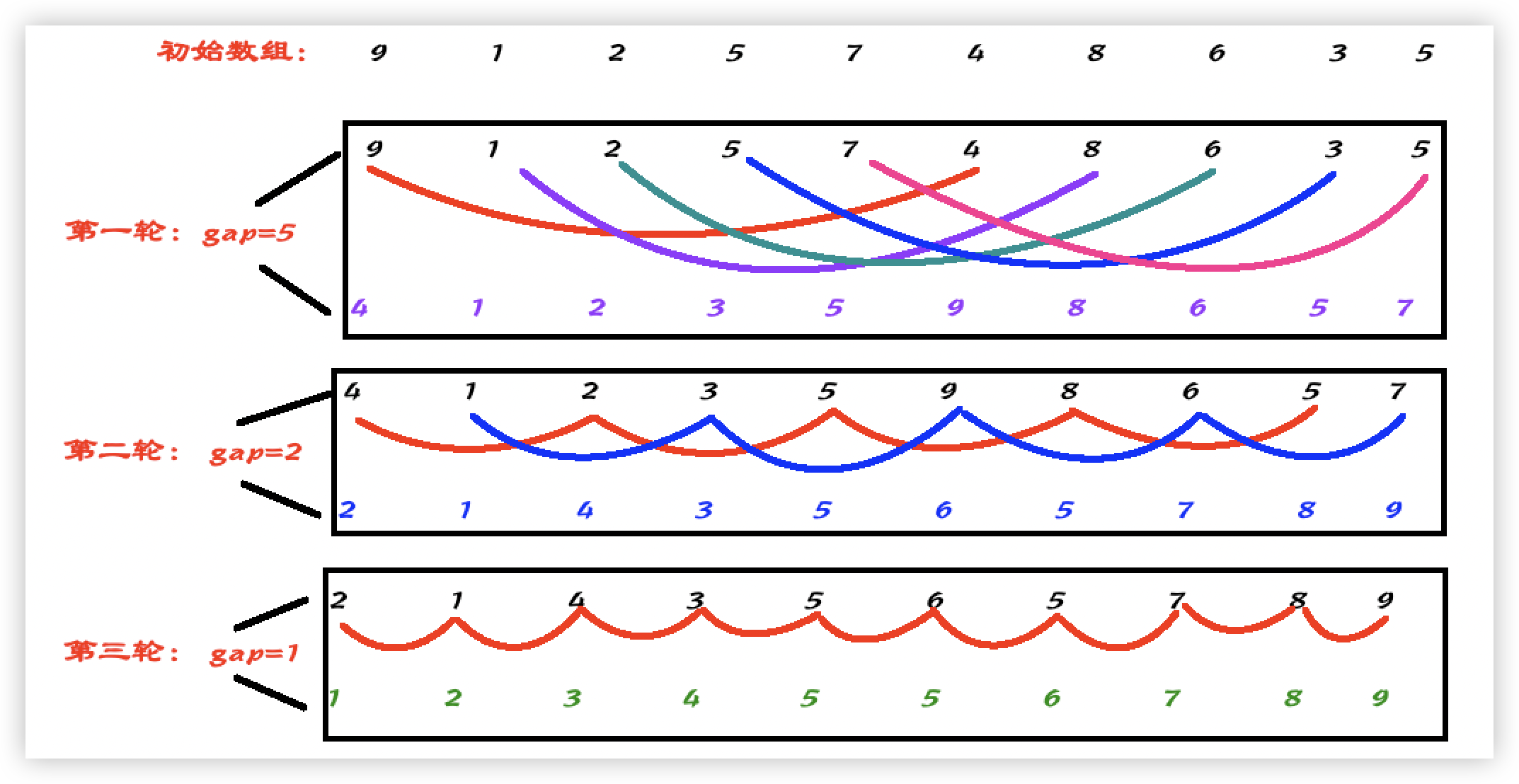
1.2 希尔排序
核心思路:
选取一个整数gap,将所有距离为gap的元素分为一组,对每个分组进行插入排序;
缩小gap的值,之后重新按照上述规则进行排序,直到gap=1停止排序;
public static void shell(int[] arr,int gap) {
for(int i=gap;i<arr.length;i++) {
for(int j=i;j>=gap;j-=gap) {
if(arr[j-gap]>arr[j]) {
Swap.swap(arr, j-gap, j);
}
else {
break;
}
}
}
}
public static void shellSort(int[] arr) {
int gap=arr.length;
while(gap>1) {
gap/=2;
shell(arr, gap);
}
}
public static void main(String[] args) {
int[] arr=new int[]{9,8,7,6,5,4,3,2,1};
shellSort(arr);
for(int x:arr)
System.out.print(x+" ");
}
希尔排序的特点:
- 希尔排序是对插入排序的优化,gap>1之前的排序是预排序,是为了让数组更接近有序
- 希尔排序的时间复杂度不好估计,因为gap的选择和更新策略有很多种,是不确定的;
二.选择排序
选择排序一般分为两种:1.选择排序 2.堆排序
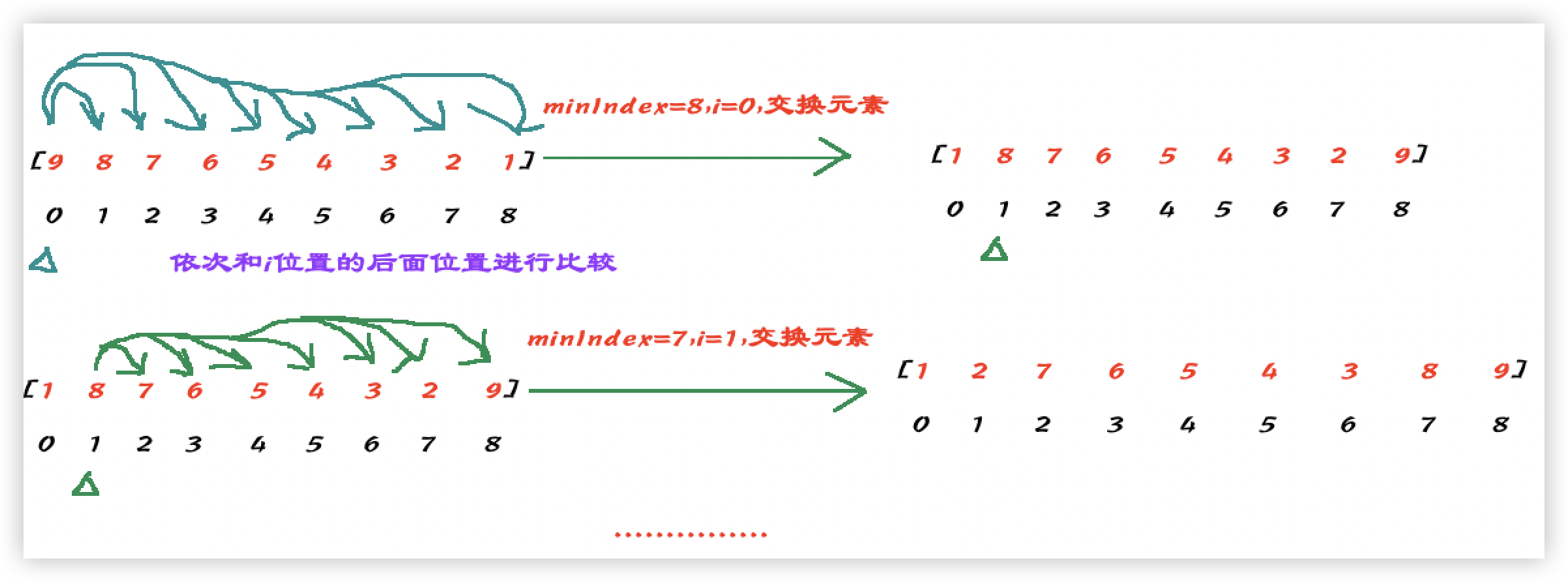
2.1 选择排序
以升序为例,其基本思想为: 对于每个元素nums[i],依次和其后面的元素进行比较,记录最小值所在下标index,交换i,index处的元素;
public class SelectSort {
public static void selectSort(int[] arr) {
//依次遍历每个元素
for(int i=0;i<arr.length;i++) {
int minIndex=i;
//依次和后面的元素比较,获得最小值的index
for(int j=i+1;j<arr.length;j++) {
if(arr[minIndex]>arr[j]) {
minIndex=j;
}
}
swap(arr, minIndex, i); //交换 i,index处的元素
}
}
public static void main(String[] args) {
int[] arr=new int[]{9,8,7,6,5,4,3,2,1};
selectSort(arr);
for(int x:arr)
System.out.print(x+" ");
}
}
选择排序的特点:
- 选择排序是不稳定的算法
- 选择排序的时间复杂度为O(n^2),空间复杂度为O(1)
2.2 堆排序
升序建大堆,降序建小堆;
堆排序的基本思路:
- 首先建立一个空堆,之后依次插入数组元素,每次插入后调整堆,使其满足堆结构
- 取出堆顶元素,堆最后一个元素代替堆顶,向下调整时满足堆结构;
- 重复操作2,依次取出的元素即为已经排好序的序列;
public class HeapSort {
public static void heapSort(int[] arr) {
createHeap(arr); //建大(小)堆
int end=arr.length-1;
while(end>0) {
swap(arr, 0, end); //堆顶,堆底元素互换
shiftDown(arr,0, end); //向下调整
end--;
}
}
public static void createHeap(int[] array) {
int size=array.length;
for(int i=(size-1-1)/2;i>=0;i--) {
shiftDown(array,i, size);
}
}
//i为要调整的位置
//size为数组实际大小
//向下调整的时间复杂度:O(logn)
private static void shiftDown(int[] array,int i,int size) {
int child=2*i+1;
while(child<size) { //只有节点有孩子就进循环
//获取孩子节点最大值所在下标
//1.如果无右孩子=》index=child
//2.有左右孩子 =》index=elem[child]<elem[child+1]?child+1:child
int maxPos=(child+1<size)&&(array[child]<=array[child+1])?child+1:child;
//如果已经是大根堆,则无需调整
if(array[maxPos]<=array[i]) {
break;
}
//节点交换,位置更新
Swap.swap(array,i,maxPos);
i=maxPos;
child=2*i+1;
}
}
public static void main(String[] args) {
int[] arr=new int[]{1,9,7,6,0,5,3,8};
heapSort(arr);
for(int x:arr)
System.out.print(x+" ");
}
}
三.交换排序
交换排序一般分为两种: 1.冒泡排序 2.快速排序
3.1 冒泡排序
每次将起点当作最值,依次和其他元素对比,如果不是最值,则两两交换,使得每次移动的都是最值,最终将最值放入末尾;之后循环此操作依次找出第k小的值;
public static void bubbleSort(int[] array) {
int n=array.length;
for(int i=0;i<n;i++) {
boolean flag=false; //标记位,如果未发生交换,说明整体有序
for(int j=0;j<n-i-1;j++) {
if(array[j]>array[j+1]) {
Swap.swap(array, j, j+1);
flag=true;
}
}
if(!flag==true) {
break;
}
}
}
3.2 快速排序
3.2.1 Hoare版
每次选择最左侧元素作为轴元素,右找小,左找大,最终找到轴元素的合适位置;
public static int partion3(int[] array,int l,int r) {
int left=l,right=r;
int ret=array[left];
while(left<right) {
//往右找小,找到停止
while(left<right&&ret<=array[right]) {
right--;
}
//往左找大,找到停止
while(left<right&&ret>=array[left]) {
left++;
}
//保证 左<轴元素<右 =》交换两个数据
Swap.swap(array, left, right);
}
//l的位置即轴元素原来在的位置,交换位置
Swap.swap(array, left, l);
//返回轴元素的最终位置
return left;
}
public static void quickSort3(int[] array,int l,int r) {
if(l>=r) {
return ;
}
//获取轴元素在排好序后的下标
int index=partion3(array,l,r);
//对轴元素的左侧继续取轴
quickSort3(array,l,index-1);
//对轴元素的右侧继续取轴
quickSort3(array,index+1,r);
}
3.2.2 挖坑法
每次选取最左侧元素作为坑pivot,右找大,左找下,最终确定合适的坑的位置。
public static int partion(int[] array,int l,int r) {
//每次选第一个元素作为坑
int pivot=array[l];
int left=l,right=r;
while(left<right) {
//必须加上left<right,因为不加可能即使left>right也不会停止
//向右找比坑小的元素,找到停止并将小的放到left处
while(left<right&&pivot<=array[right]) {
right--;
}
//向右找比坑大的元素,找到停止并将大的放到right处
array[left]=array[right];
while(left<right&&pivot>=array[left]) {
left++;
}
array[right]=array[left];
}
//全部找完,left即为坑的位置
array[left]=pivot;
//返回坑的位置
return left;
}
public static void quickSort(int[] array,int l,int r) {
if(l>=r) {
return ;
}
int pivot=partion(array,l,r);
//坑左边找新坑
quickSort(array, l, pivot-1);
//坑右边找新坑
quickSort(array, pivot+1, r);
}
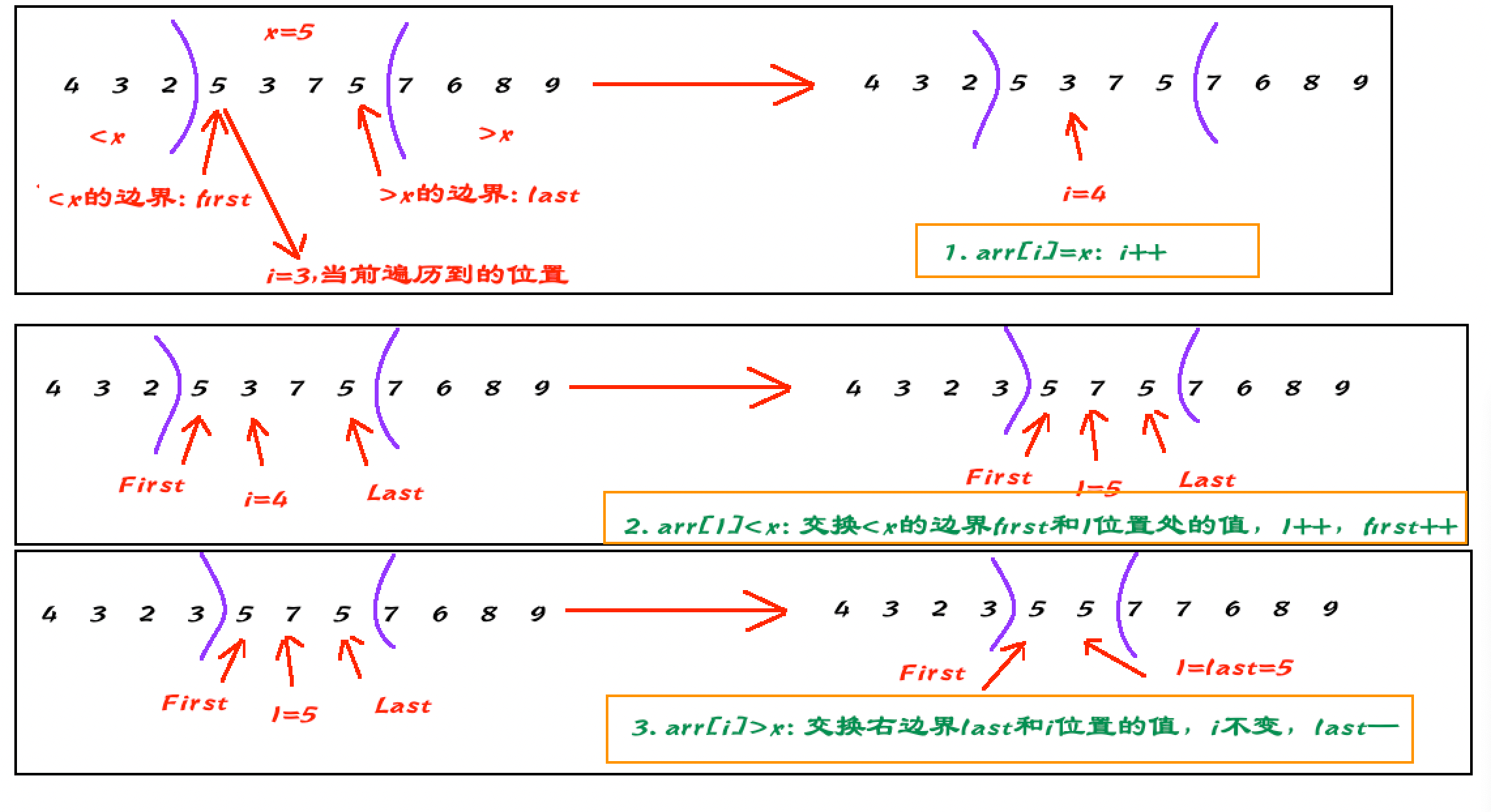
3.2.3 双指针法
一开始定义两个首位指针,首指针始终执行<x的边界,尾指针始终指向>x的边界;
//first: <x的边界,即该处的值>=x
//last: >x的边界,即该处的值<=x
//=>结合划分,最终一定有 arr[first]=arr[last]=x,且[first,last]表示均为x的部分
public static int first,last;
//对区间[l,r]内的元素进行划分,划分为三部分 <x ==x >x 并返回==x部分的位置
public static void partion1(int[] array,int l,int r,int target) {
first=l; //<x的边界
last=r; //>x的边界
int i=l;
while(i<=r&&i<=last) {
//1.如果 arr[i]<x => 交换i和first处的值,i++,first++;
if(array[i]<target) {
Swap.swap(array, first++, i++);
}
//2.如果 arr[i]>x => 交换i和last处的值,last--,i不变,因为不知道
//交换后的arr[i]的值属于哪部分
else if(array[i]>target) {
Swap.swap(array, last--, i);
}
//3.如果arr[i]==x => i++
else {
i++;
}
}
}
//递归过程本质是: 前序遍历(中左右)
public static void quickSort1(int[] array,int l,int r) {
if(l>=r) {
return ;
}
int x=array[l]; //选取第一个元素作为轴元素(可改进)
//该函数结束,使得[l,r]分为三部分: 1.[l,first)<x 2.[first,last]=x 3.(last,r]>x
partion1(array,l,r,x);
//防止全局变量被覆盖
int left=first;
int right=last;
quickSort1(array,l,left-1);
quickSort1(array,right+1,r);
}
快排本质就是: 二叉树的前序遍历
3.2.4 快排的优化
1.三数取中:
即每次从 left,right,(left+right)/2,三个位置中,选择这些位置对应值的中位数作为pivot;
2.小区间优化:
即便有三数取中,但这样的快排仍然有着问题。由上面的理论可知,快排实际就相当于二叉树的前序遍历,而树随着层的增高,其每层节点以指数形式上升,每个节点就是一次递归,因此可见,当区间越来越小,其时间消耗反而越来越多,因此,当区间小到一定层度时,改为其他的非递归排序,如插入排序;
3.随机快排:
如上的两种优化策略均无法实现真正的O(n * logn)的复杂度,但如果采用随机快排,即每次随机选取轴元素的策略,那么可以使时间复杂度的期望达到真正意义的O(n * logn);
将双指针版的快排做如下修改:
//修改前:
int x=array[l]; //选取第一个元素作为轴元素
//修改后
int x = nums[left + random.nextInt(right - left + 1)];
四.归并排序
归并排序和快排采用的均是分治思想;
主要思路:
- 不断以中点为轴,划分左右区间;
- 不断对左区间进行同样方式的划分,直到无法划分,返回
- 不断对右区间进行同样方式的划分,直到无法划分,返回
- 重复对有序区间[l,mid]和[mid+1,r]的元素进行合并,直到合并成完整区间
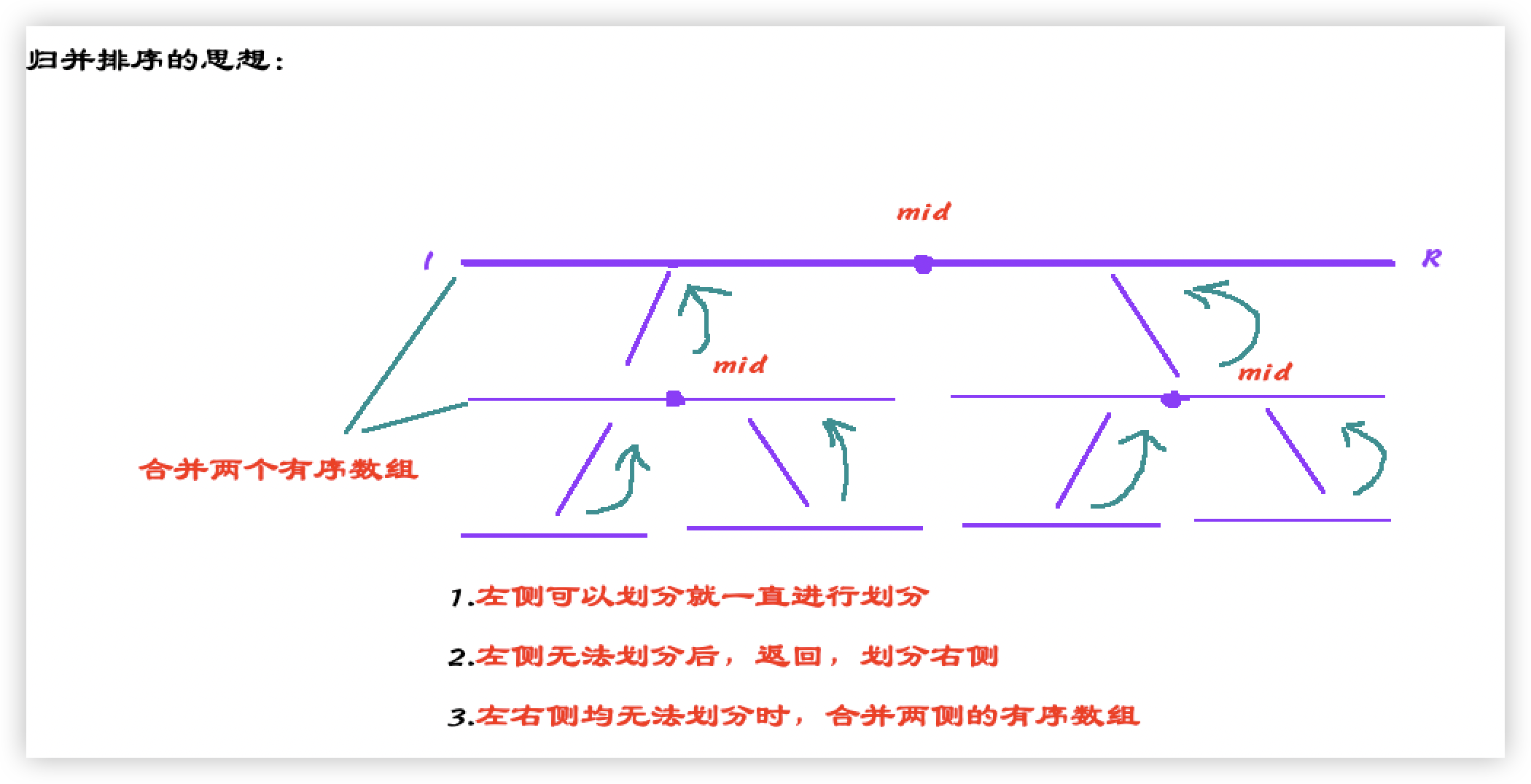
如上,可以看着归并排序本质就是树的后序遍历(左右中);
public static int[] tmp;
public static void mergeSort(int[] array,int l,int r) {
//如过区间只要1个元素或者下标越界,直接返回
if(l>=r) {
return ;
}
//划分区间=》找中间点
int mid=l+(r-l)/2;
//划分左区间
mergeSort(array, l, mid);
//左区间无法划分时,划分右区间
mergeSort(array, mid+1, r);
//合并区间: [l,mid]+[mid+1,r] => [l,r]
//tmp=new int[r-l+1] =>可以在递归中定义,但每次递归均需要定义,因此建议写成全局变量
int p1=l,p2=mid+1,p=0;
while(p1<=mid&&p2<=r) {
tmp[p++]=(array[p1]<array[p2])?array[p1++]:array[p2++];
}
while(p2<=r) {
tmp[p++]=array[p2++];
}
while(p1<=mid) {
tmp[p++]=array[p1++];
}
//将合并后的数组还原到原数组
for(int i=l;i<=r;i++) {
array[i]=tmp[i-l];
}
}
public static void sortArray(int[] nums) {
tmp=new int[nums.length];
mergeSort(nums, 0, nums.length-1);
}
归并排序的特点:
- 归并排序的时间复杂度为O(nlog(n)),空间复杂度为O(n)
- 归并排序是稳定的算法
- 归并排序的缺点是O(n)的空间复杂度,更多用在外排序中
五.总结
| 排序方式 | 最好时间复杂度 | 最坏时间复杂度 | 空间复杂度 | 稳定性 |
|---|---|---|---|---|
| 冒泡排序 | O(n^2) | O(n^2) | O(1) | 稳定 |
| 插入排序 | O(n) | O(n^2) | O(1) | 稳定 |
| 选择排序 | O(n^2) | O(n^2) | O(1) | 不稳定 |
| 希尔排序 | O(n) | O(n^2) | O(1) | 不稳定 |
| 堆排序 | O(n* logn) | O(n* logn) | O(1) | 不稳定 |
| 快速排序 | O(n* logn) | O(n^2) | O(logn)~O(n) | 不稳定 |
| 归并排序 | O(n* logn) | O(n* logn) | O(n) | 稳定 |