目录
1.课题概述
传统FOC采用PI调节器作为电流环控制器,虽能实现平滑调节,但在快速起停场景(如机器人急停、电梯抱闸)中存在动态响应慢、超调量大的问题。Bang-Bang(砰砰)控制作为一种非线性控制算法,通过输出最大控制量加速系统到达目标状态,可显著提升电机的起停响应速度,尤其适用于需要快速制动或启动的工况。基于Bang-Bang起停式算法的FOC控制系统,在常规运行阶段采用PI调节实现高精度调速,在起停阶段切换为Bang-Bang控制输出最大电压矢量,兼顾了控制精度与动态响应性能。
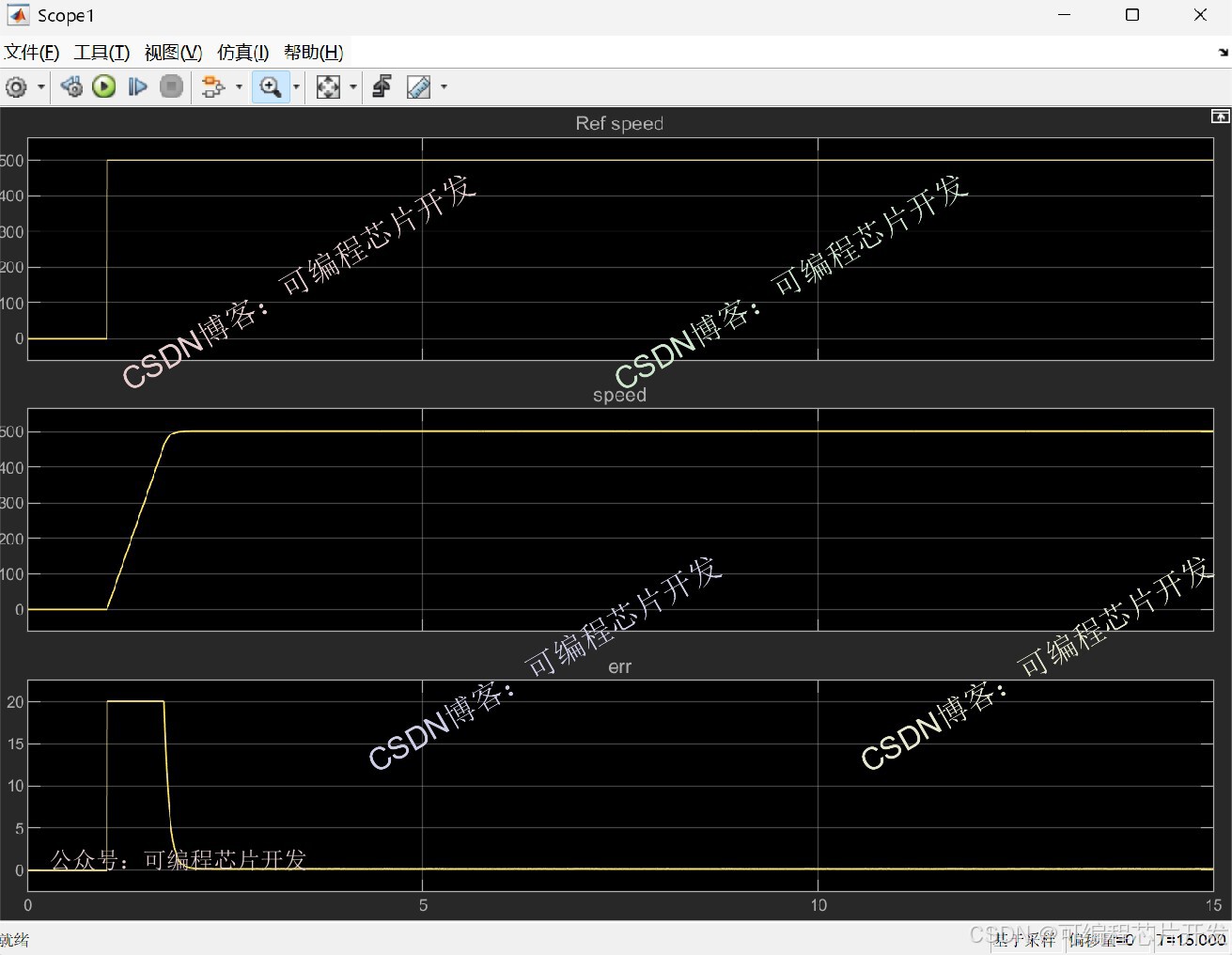
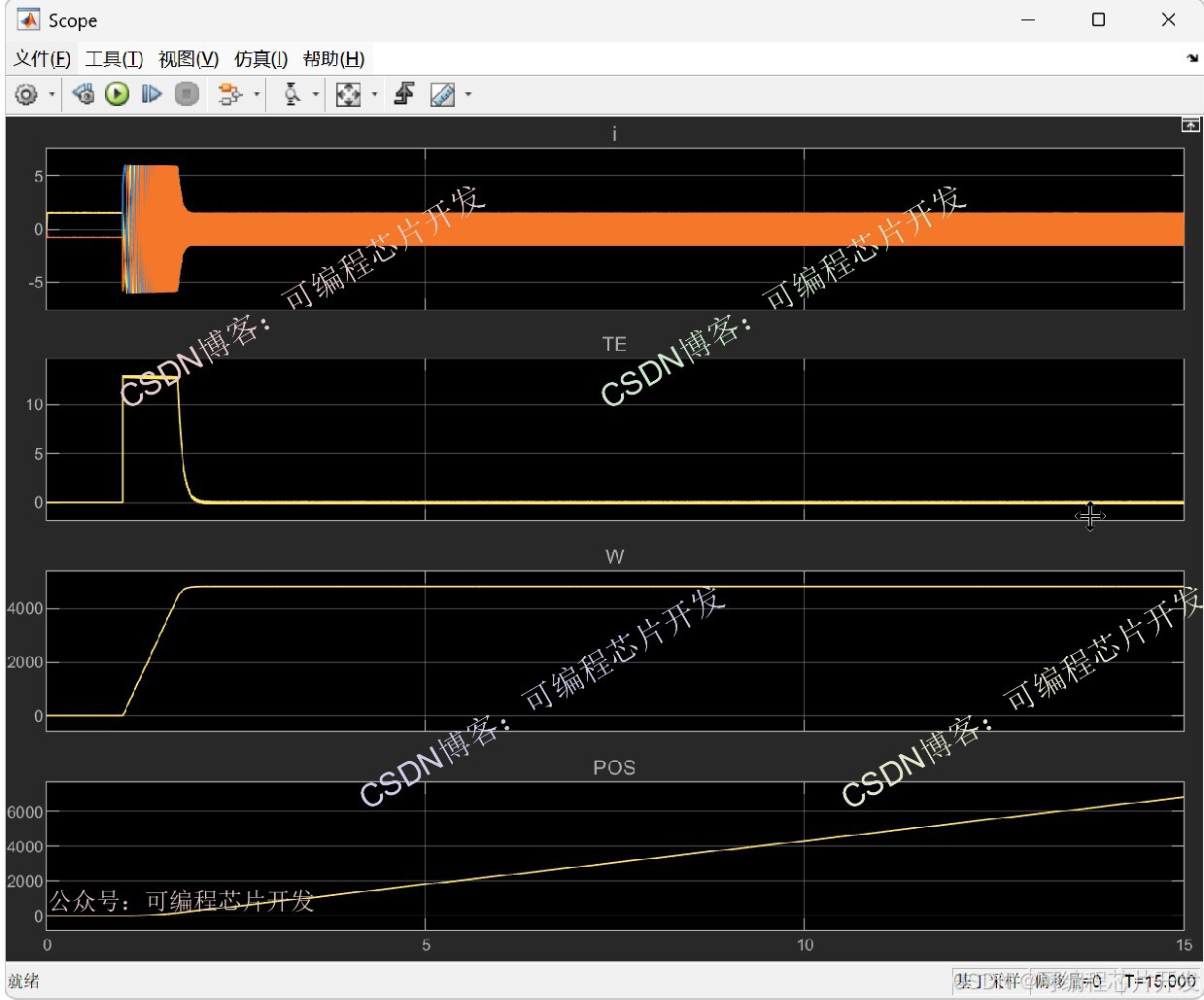
2.系统仿真结果
3.核心程序
matlab2024b
128
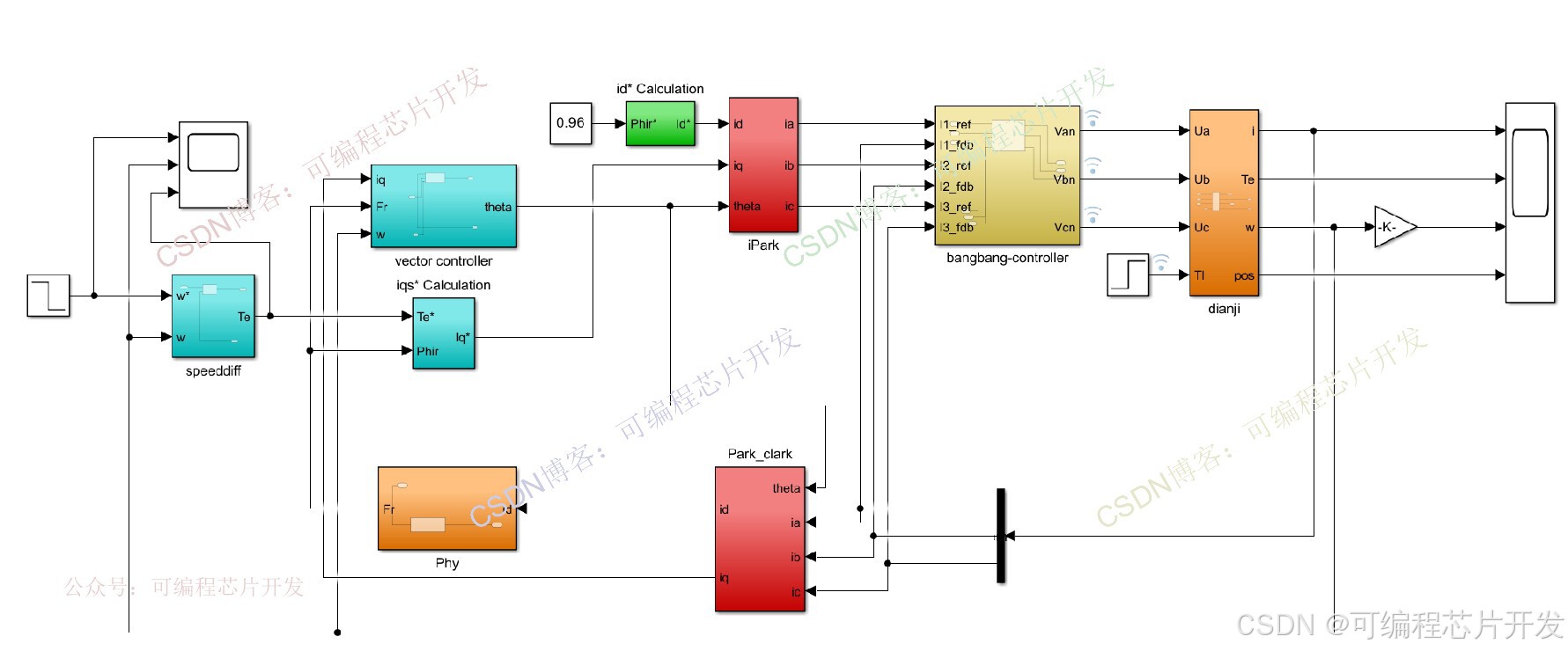
4.系统原理简介
FOC控制系统通过三次坐标变换实现电机控制的解耦:
Clark变换:将三相静止坐标系(a,b,c)的电流ia,ib,ic转换为两相静止坐标系(α,β)的电流iα,iβ,公式为:

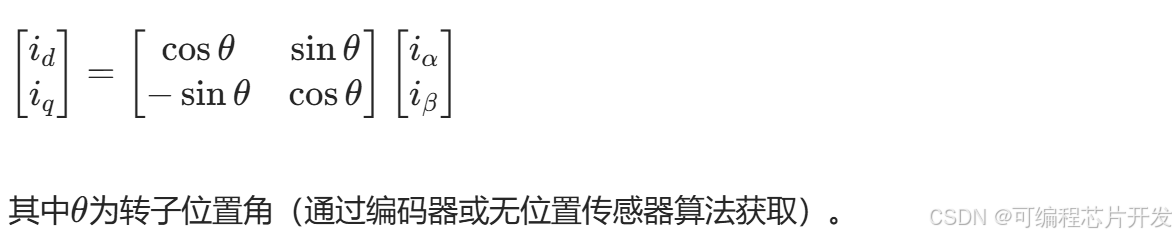
Park变换:将两相静止坐标系(α,β)的电流转换为两相旋转坐标系(d,q)的电流id,iq,其中d轴为转子磁链方向,q轴垂直于d轴,公式为:
Bang-Bang控制的起停原理
Bang-Bang 控制是一种时间最优控制策略,其输出量仅取两个极值(最大 / 最小),通过状态反馈快速驱动系统到达目标值。在电机起停控制中,其核心逻辑为:
启动阶段:当电机实际转速n远小于目标转速n∗时,Bang-Bang控制器输出最大q轴电流指令iq_max(受限于逆变器容量和电机额定电流),产生最大电磁转矩加速电机。
制动阶段:当需要快速停车时,控制器输出反向最大q轴电流指令−iq_max,产生制动转矩使电机迅速减速。
切换条件:当转速接近目标值(进入阈值范围±Δn)时,从Bang-Bang控制切换回PI调节,避免系统震荡。
Bang-Bang起停式算法与FOC的结合,通过在起停阶段输出最大控制量,解决了传统PI控制动态响应慢的问题,同时保留了FOC在稳态运行时的高精度特性。该系统的核心在于合理设计Bang-Bang与PI的切换阈值、最大电流限制及PI参数,确保起停快速性与稳态稳定性的平衡。
5.参考文献
[1]张厚祥,宗光华.分段变结构Bang-Bang控制器在气动脉宽调制位置伺服系统中的研究[J].机器人, 2001, 23(6):5.DOI:10.3321/j.issn:1002-0446.2001.06.007.
6.完整工程文件
v