提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
提示:这里可以添加本文要记录的大概内容:
本章介绍的电路是 双向DC-DC变换器 。仿真软件主要采用免费的LTSpice。
淘宝店铺:LaTex 编辑部
店铺主要经营:论文排版、论文格式编辑、LaTex软件安装等业务。如有需要欢迎光临本店。
仿真文件是免费的。。。
版权属于 淘宝店铺:LaTex 编辑部,如需转载请标明出处。。。
一、双向DC-DC变换器的基本原理
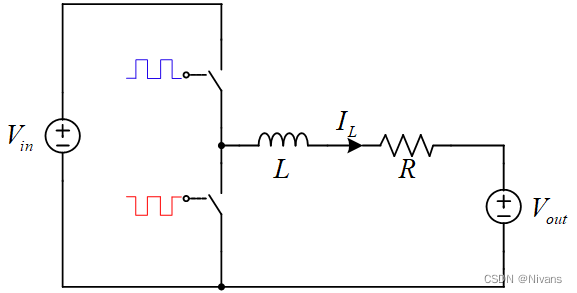
双向DC-DC变换器的电路图如下。电路由2个开关管,一个电感及输入、输出电源构成。
图中 R R R是电路的寄生电阻,这个寄生电阻可能是开关管、电感、电源内阻、取样电感中一个或者几个的叠加。电路假设输入、输出电源电压的变化速度小,因此,输入、输出端不添加电容。这样做的话电路比较简单,分析起来会比较方便。其实,这个电路就是从同步整流Buck电路变过来的,输出端的电容去掉了,用一个电压源替代。
上下两管驱动电压的波形是一组相位互为180°的方波,上管方波的占空比定义为 d ( t ) d(t) d(t)。下管的占空比为 1 − d ( t ) 1-d(t) 1−d(t)。括号带时间 t t t表明这占空比随时间的变化而变化。但是,大家仔细看我给出的电路里边所有字母都是大写的表示的是 稳态 的 平均值。画图比较仓促,符号的表示有些随意性,请多多包涵。
以占空比 d ( t ) d(t) d(t)为权重因子建立电路方程:
L d ⟨ i L ⟩ T s d t = − R i L + d ( t ) V i n − V o u t (开环) L\frac{d\lang{i_L}\rang_{T_s}}{dt}=-Ri_L+d(t)V_{in}-V_{out}(开环) Ldtd⟨iL⟩Ts=−RiL+d(t)Vin−Vout(开环)
哈哈,电路方程就只有一个。接下来,由 伏秒平衡 可知,电感电压在稳态的时候,平均值等于0,于是,令方程等于0,可以求出方程的稳态解。
L d ⟨ i L ⟩ T s d t = − R i L + d ( t ) V i n − V o u t = 0 (开环) L\frac{d\lang{i_L}\rang_{T_s}}{dt}=-Ri_L+d(t)V_{in}-V_{out}=0(开环) Ldtd⟨iL⟩Ts=−RiL+d(t)Vin−Vout=0(开环)
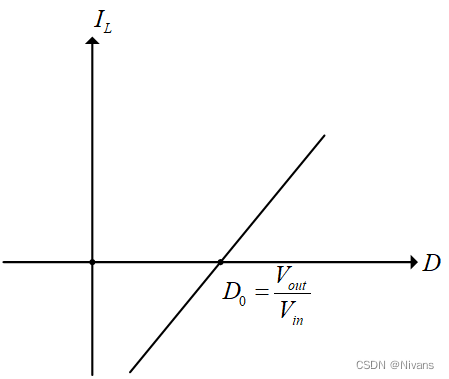
可求出稳态占空比 D D D与稳态电感电流 I L I_L IL之间的关系如下:
I L = D V i n − V o u t R (开环) I_L=\frac {DV_{in}-V_{out}}{R}(开环) IL=RDVin−Vout(开环)
并画出关系图。我们可以看到直线与横坐标轴有一个交点 D 0 {D_0} D0,这个点是电感电流方向的分界点,当占空比 D D D比 D 0 {D_0} D0小的时候,稳态电感平均电流 I L I_L IL的方向是电路图中所标注的相反方向,此时,能量从输出端朝输入端流动,顺着电流的方向看过去,电路工作在升压模式。当占空比 D D D比 D 0 {D_0} D0大的时候,稳态电感平均电流 I L I_L IL的方向与图中标示一致,能量从输入端向输出端流动,此时电路工作在降压模式。
模型中的 R R R一般情况下是很小的,因此,在输入电压很大的情况下,直线的斜率应该很大。假如输入电压是40V,R的大概0.5 Ω \Omega Ω这样,那么斜率就有80A/D这样子。占空比的变化范围是虽然很小,步进值在0.1的时候,电流的变化有8A这样子,因此,手动调节是很难达到精确控制的。且当占空比等于0的时候,相当于下管完全开通,这样输出电源相当于被短路, I L I_L IL是很大的,当占空比等于1时,上管完全开通,下管完全关闭,流过 I L I_L IL取决于输入电源与输出电源的差值,如果差值很大,那么 I L I_L IL也是很大的。
因此,开环控制是很难精确控制 I L I_L IL,并且调节占空比 D D D时, I L I_L IL跑得这么快好像对于开关管好像不太安全。。。需要使用控制电路对电感电流进行闭环控制。
二、基于LTSpice的双向DC-DC变换器的仿真电路搭建
1、用到的芯片
TL494、IR2104。。。
TL494 负责反馈控制以及生成占空比随控制信号变化的PWM波。TL494比较常见,网上有很多关于它的资料。
IR2104 负责驱动半桥。。。同步整流电路两个开关组成了半桥的结构。用2104是非常合适的。
2、仿真电路图
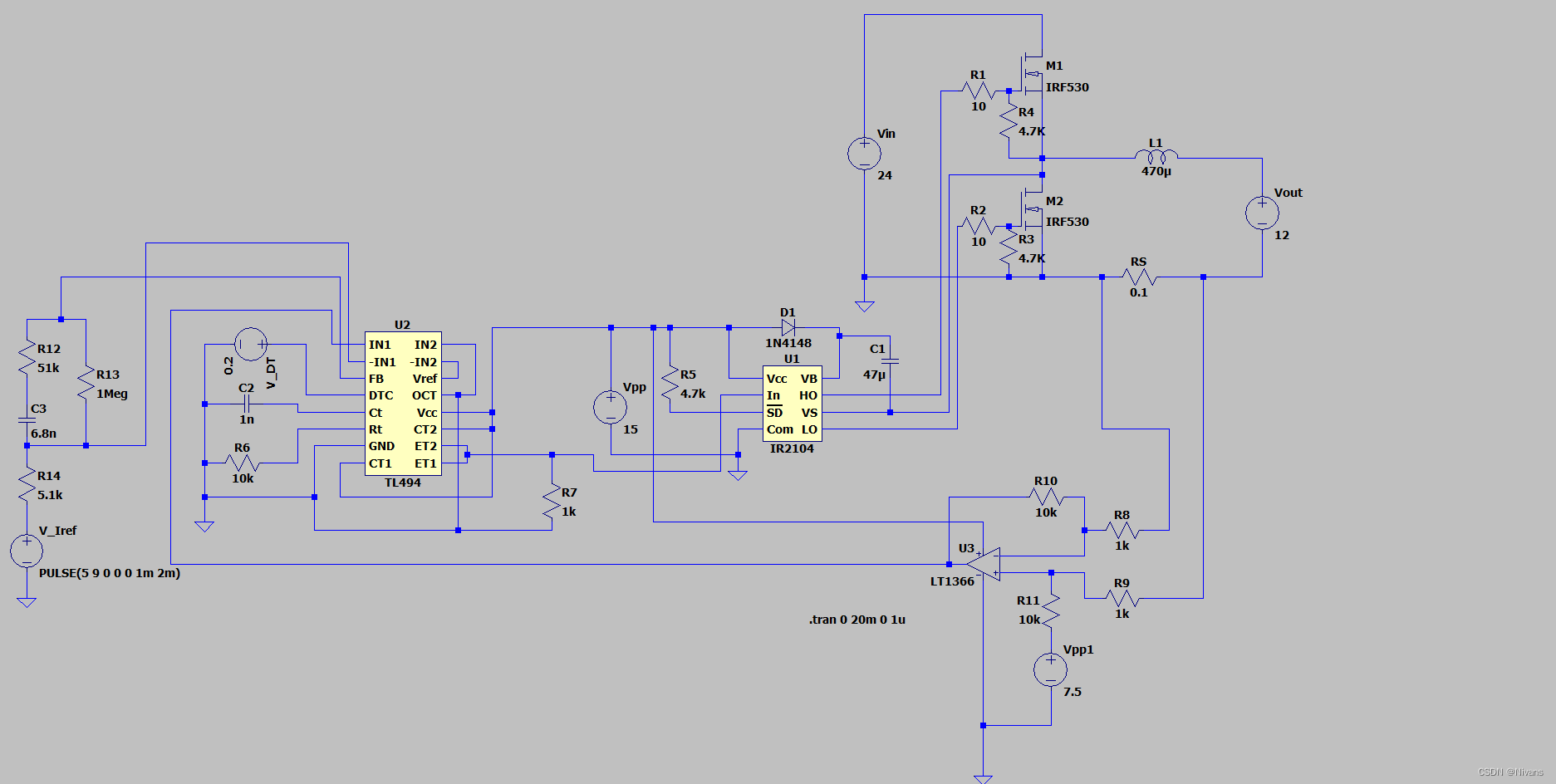
仿真电路直接贴出来了。输入电压 V i n V_{in} Vin,输出电压 V o u t V_{out} Vout,分别是24V,12V。
电路的具体细节就不再详细讲解,这里只讲个大概。有机会的话,我会把详细的讲解视频放到B站上。
IR2104 这块电路,数据手册上已经有了,这里也不再详细叙述。上拉电阻 R 5 R_5 R5用于关闭PWM信号的封锁。
电阻 R 3 R_3 R3, R 4 R_4 R4其实可以不加,在实际电路中加了可以防止MOS关断失效,导致桥臂直通故障。电阻 R 1 R1 R1、 R 2 R2 R2取10欧,也可以取其他值,这两个电阻的主要作用是:1、考虑EMI的问题,降低MOS的开通速度。2、阻尼PCB寄生电感与GS之间的等效电容产生的振荡。
对于TL494,关键的地方还是补偿电路( R 12 R_{12} R12、 R 13 R_{13} R13、 R 14 R_{14} R14、 C 3 C_{3} C3)这里。 R 12 R_{12} R12、 R 14 R_{14} R14、 C 3 C_{3} C3组成一个PI控制器,PI控制器包含一个零点,一个零极点。被控制对象的阶数只有一阶,对于这样的系统使用PI控制器进行闭环控制是非常合适的。另外,在TL494的一份设计手册中提到 R 13 R_{13} R13的作用是降低运放的直流增益,增强运放的稳定性,但是会增大稳态误差。难道这款IC的运放性能不是很好?!!
其他引脚的外部电路不再细讲。。。
3、电路测试
理论没经过实践,还是白搭。。。。
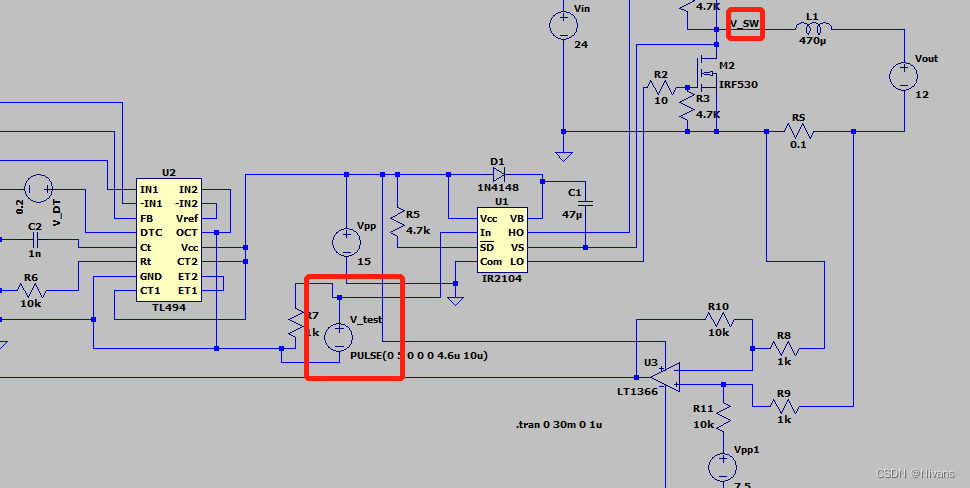
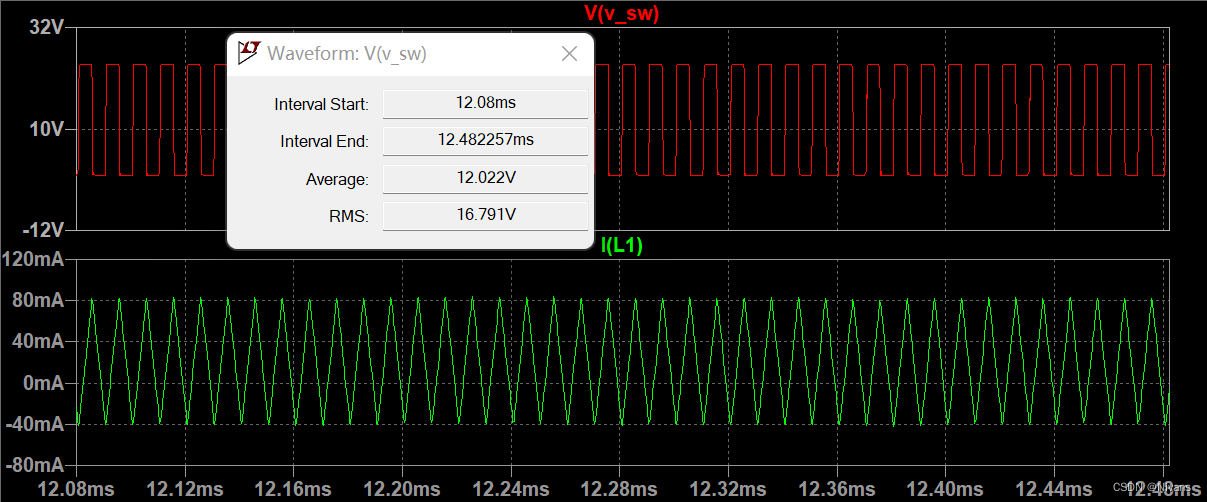
一、验证 D 0 D_0 D0处的 I L I_L IL值(开环实验)
将TL494与IR2104的PWM信号路径切掉,在IR2104的IN端接一个方波电压源。设置导通时间,使节点V_SW处的平均电压等于差不多12V,占空比就差不多等于0.5,此时,电感的平均电流差不多等于0。由于驱动电压不是标准的方波,出现了少许误差,还是接近理论值,验证了理论没有白扯。。。
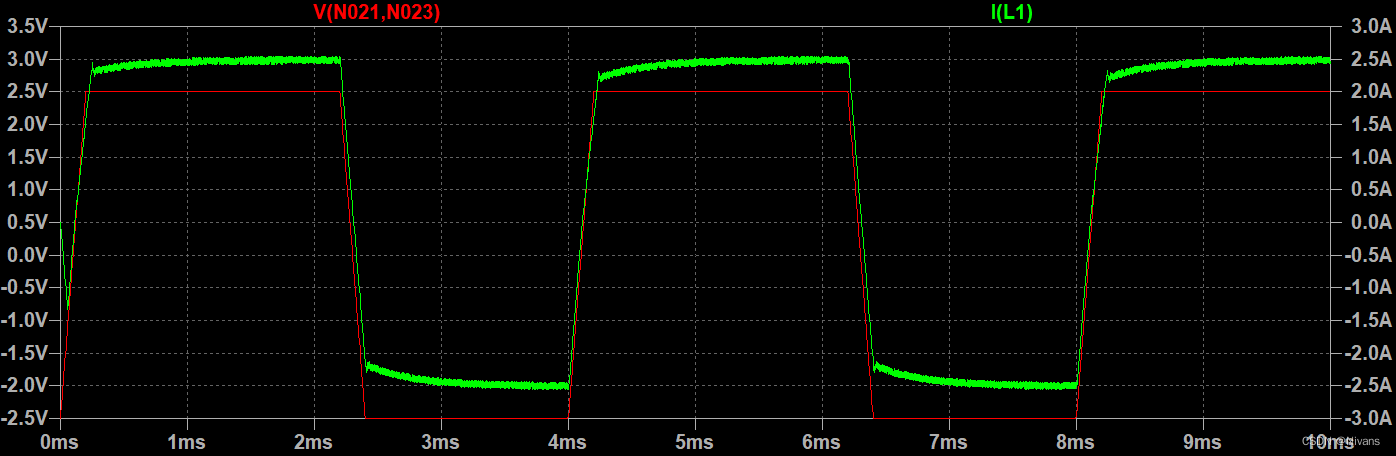
二、验证电路是否具备双向传输能量的能力及闭环控制的精度(闭环实验)
参考电压V_ref在-2.5V-2.5V之间阶跃变化,电感电流跟着在-2.5A-2.5A之间阶跃变化,能量也在输入端电源和输出端电源之间传输,电路的工作状态在降压和升压之间来回切换。
电路凑效了。。。。。
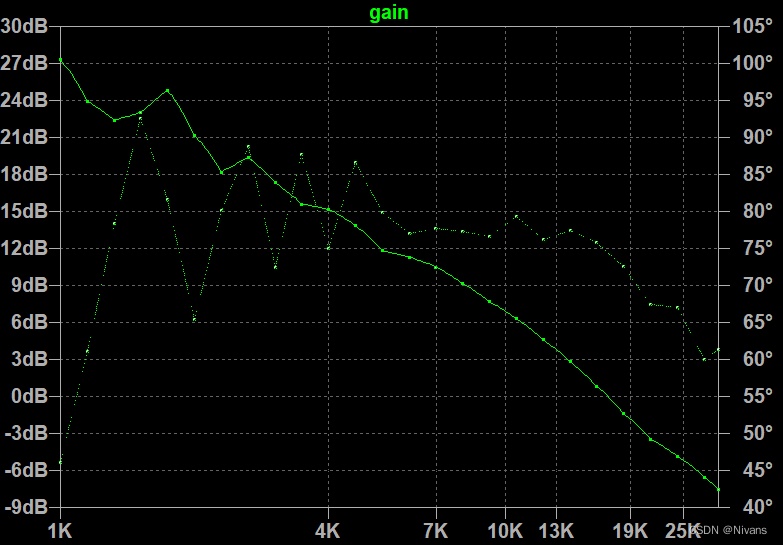
三、环路扫频(闭环实验)
这个实验比较重要,验证一下补偿网络器件的值是否正确。
这里扫频的区间选在在1k到30k之间,穿越频率点恰好落在这个区间。
扫频的下限最好高一点,点数不要太多。否则,配置差的电脑可能一天都跑不完。
实线表示增益,虚线表示相位。
同图片上看穿越频率在16k这个地方,相位裕度有70度。
稳如狗。。。
三、结束
关于频率补偿电路暂时不做讲解。其实,补偿电路的那3个元件非常好调。从专业的角度看,功率级是一个一阶系统,电路的动态特性会比较简单。稳定性这个问题可以不用太担心。。。
仿真文件的连接如下:
[点击下载] Birbuckboost_LTSpice.rar
文件目录如下:

确保TL494,IR2104 的库文件和仿真文件在同一目录。
文件:
BirBuckBoost_PI1_CurrentLoop.asc 用来仿真时域波形。
TL494_CurrentLoop_FRA.asc 用来仿真环路的频率响应,里边写好了仿真控制的代码。