USB转I2C芯片简介
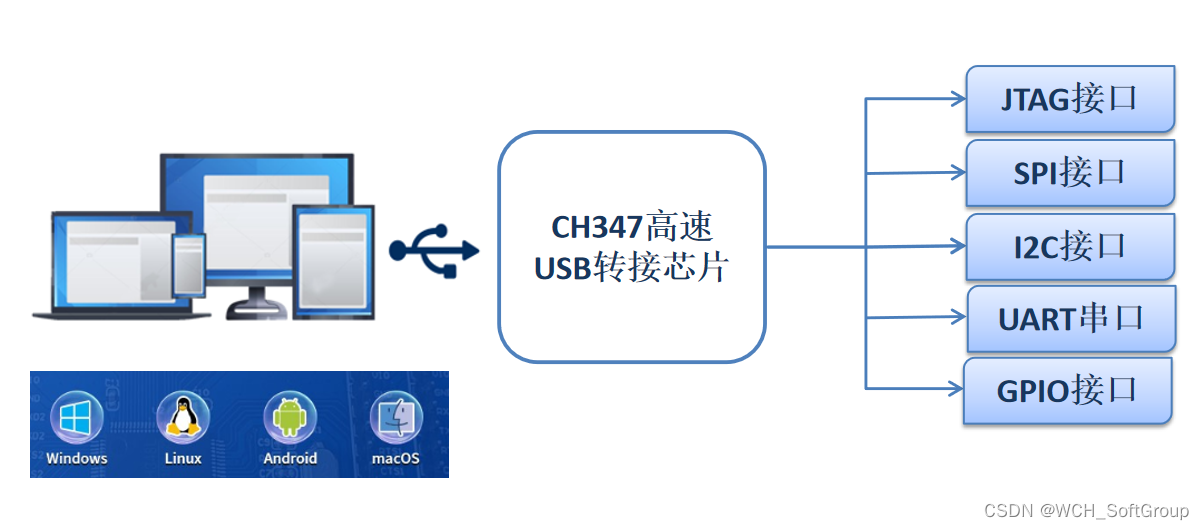
高速USB转接芯片CH347是一款集成480Mbps高速USB接口、JTAG接口、SPI接口、I2C接口、异步UART串口、GPIO接口等多种硬件接口的转换芯片。
接口示意图:
CH347-I2C接口特点
- USB传输采用USB2.0高速(480Mbps)
- 工作在 Host/Master主机模式;
- 硬件信号:SCL、SDA;
- 支持4种传输速度:低速20KHz、标准100KHz、快速400KHz、高速750KHz;
- 支持I2C时序参数调节;
- 提供计算机端驱动程序和USB转I2C函数库,支持二次开发
使用芯片准备工作
选择CH347工作模式
CH347芯片在复位时,会根据DTR1(CFG0)和RTS1(CFG1)引脚的电平状态配置其工作模式,各工作模式及功能说明如下
工作模式 |
模式说明 |
CFG0 |
CFG1 |
Mode0 |
480Mbps高速USB转双UART(Baudrate最高9Mbps) |
1 |
1 |
Mode1 |
480Mbps高速USB转UART+SPI+I2C(厂商驱动模式) |
0 |
1 |
Mode2 |
480Mbps高速USB转UART+SPI+I2C(系统HID驱动模式) |
1 |
0 |
Mode3 |
480Mbps高速USB转UART+JTAG(厂商驱动模式) |
0 |
0 |
CH347可使用SPI的模式有两种,其区别在Mode1需要安装厂商驱动,Mode3可以使用系统内置HID驱动无需额外安装,只需在编程时调用CH347动态库进行软件编程即可,此处我们使用Mode1来进行操作。
驱动安装
windows驱动安装
从WCH官网下载CH347转SPI/I2C/JTAG/GPIO驱动:CH341PAR.EXE - 南京沁恒微电子股份有限公司
驱动下载后进行一次安装,后续即可实现系统“免驱”效果无需二次安装。未插入设备时安装会显示“驱动预安装成功”,此时驱动已经正常安装,硬件即插即用。
Windows驱动通过微软数字签名认证,支持32/64位 Windows 11/10/8.1/8/7/VISTA/XP/2000,SERVER 2019/2016/2012/2008/2003等系统,无需担心Windows不同系统兼容性问题。
官方同时提供驱动资源包CH341PAR.ZIP - 南京沁恒微电子股份有限公司,可将驱动安装文件打包至成熟产品一齐发布,且支持无界面安装操作,可通过软件编程调用命令行操作,只需执行“SETUP /S”命令即可静默驱动安装。
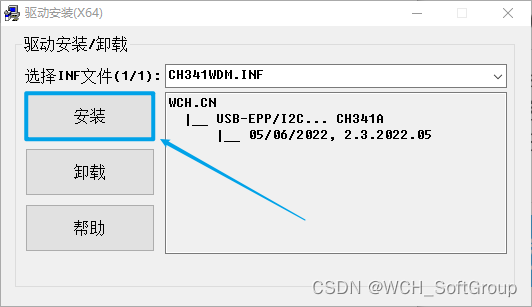
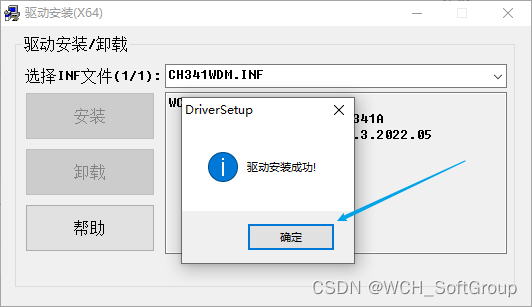
点击安装之后,等待弹出安装成功窗口后点击确定即可。
Linux驱动安装
联系WCH技术支持获取到CH347-Linux驱动,然后进行安装
1、执行make编译驱动;
2、执行make load动态加载驱动,或执行make install后可实现重新启动自动检测硬件并加载驱动;
3、插入设备可查看到生成前缀为ch34x_pis的设备节点。
使用USB操作EEPROM
本次操作CH347开发板板载EEPROM:24LC515H。
除此之外,CH347也可操作AT24xxx、M24xxx等等EEPROM
调用函数
WCH提供了一套公用的库函数接口,即Windows&Linux平台接口函数名称与参数一致,其库函数接口特性如下:
操作SPI、I2C、GPIO等的接口在任何工作模式下都可使用同一API,在进行软件编写时,只需调用接口完成代码操作逻辑而不用关注当前硬件工作模式。提供插拔检测函数可动态监测设备插拔信息,更方便进行设备管理。
具体详细内容可参考官方开发手册:CH347EVT.ZIP - 南京沁恒微电子股份有限公司 【目录:CH347EVT\EVT\PUB\CH347应用开发手册.PDF】
/***************插拔监测函数************/
BOOL WINAPI CH347SetDeviceNotify( // 设定设备事件通知程序
ULONG iIndex, // 指定设备序号,0对应第一个设备
PCHAR iDeviceID, // 可选参数,指向字符串,指定被监控的设备的ID,字符串以\0终止
mPCH347_NOTIFY_ROUTINE iNotifyRoutine ); // 指定设备事件回调程序,为NULL则取消事件通知,否则在检测到事件时调用该程序
/********IIC接口函数通用于Mode1/2***********/
// 设置串口流模式
BOOL WINAPI CH347I2C_Set(ULONG iIndex, // 指定设备序号
ULONG iMode ); // 指定模式,见下行
// 位1-位0: I2C接口速度/SCL频率, 00=低速/20KHz,01=标准/100KHz(默认值),10=快速/400KHz,11=高速/750KHz
// 其它保留,必须为0
// 设置硬件异步延时,调用后很快返回,而在下一个流操作之前延时指定毫秒数
BOOL WINAPI CH347I2C_SetDelaymS(ULONG iIndex, // 指定设备序号
ULONG iDelay ) ; // 指定延时的毫秒数
// 处理I2C数据流,2线接口,时钟线为SCL引脚,数据线为SDA引脚
BOOL WINAPI CH347StreamI2C( ULONG iIndex, // 指定设备序号
ULONG iWriteLength, // 准备写出的数据字节数
PVOID iWriteBuffer, // 指向一个缓冲区,放置准备写出的数据,首字节通常是I2C设备地址及读写方向位
ULONG iReadLength, // 准备读取的数据字节数
PVOID oReadBuffer ); // 指向一个缓冲区,返回后是读入的数据
#ifndef _CH341_DLL_H
typedef enum _EEPROM_TYPE {// EEPROM型号
ID_24C01,
ID_24C02,
ID_24C04,
ID_24C08,
ID_24C16,
ID_24C32,
ID_24C64,
ID_24C128,
ID_24C256,
ID_24C512,
ID_24C1024,
ID_24C2048,
ID_24C4096
} EEPROM_TYPE;
#endif
// 从EEPROM中读取数据块,速度约56K字节
BOOL WINAPI CH347ReadEEPROM(ULONG iIndex, // 指定设备序号
EEPROM_TYPE iEepromID, // 指定EEPROM型号
ULONG iAddr, // 指定数据单元的地址
ULONG iLength, // 准备读取的数据字节数
PUCHAR oBuffer ); // 指向一个缓冲区,返回后是读入的数据
// 向EEPROM中写入数据块
BOOL WINAPI CH347WriteEEPROM(ULONG iIndex, // 指定设备序号
EEPROM_TYPE iEepromID, // 指定EEPROM型号
ULONG iAddr, // 指定数据单元的地址
ULONG iLength, // 准备写出的数据字节数
PUCHAR iBuffer ); // 指向一个缓冲区,放置准备写出的数据操作流程
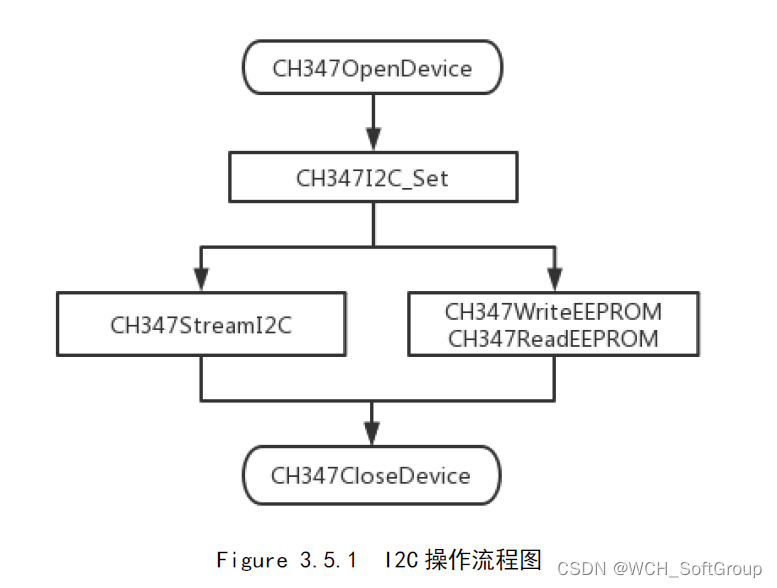
代码示例
Windows例程
可参考官方开发资料:CH347EVT.ZIP - 南京沁恒微电子股份有限公司 【目录:CH347EVT\EVT\TOOLS\CH347Demo】
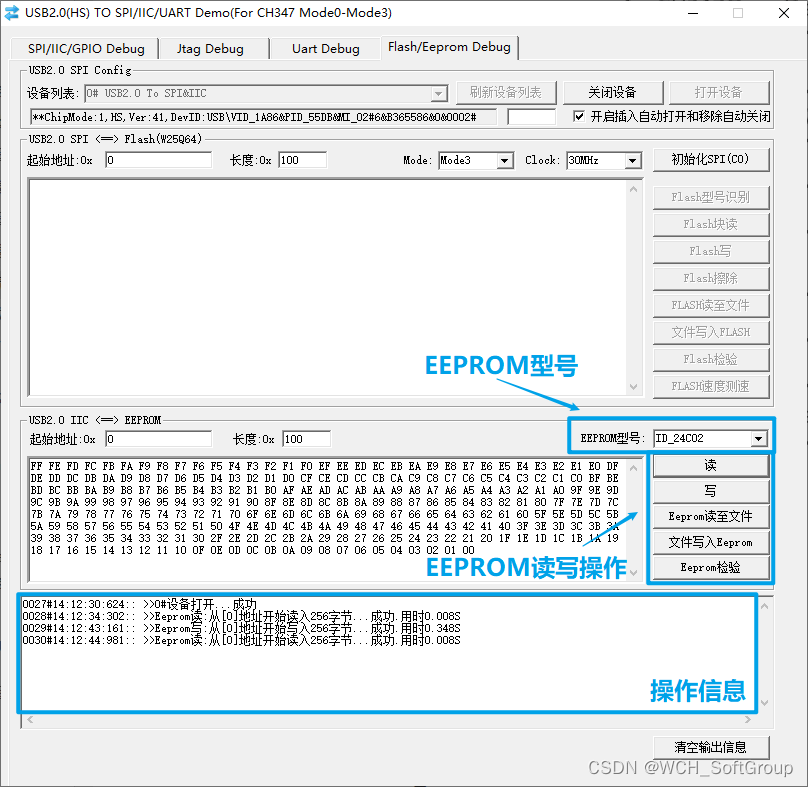
界面读写示例如下:
Linux例程
可参考如下代码:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdbool.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <time.h>
#include "CH347LIB.h"
#define CMD_FLASH_SECTOR_ERASE 0x20
#define CMD_FLASH_BYTE_PROG 0x02
#define CMD_FLASH_READ 0x03
#define CMD_FLASH_RDSR 0x05
#define CMD_FLASH_WREN 0x06
#define CMD_FLASH_JEDEC_ID 0x9F
#define SPI_FLASH_PerWritePageSize 256
#ifndef CH34x_DEBUG
#define CH34x_DEBUG
#endif
#ifdef CH34x_DEBUG
#define dbg( format, arg...)printf( format "\n", ##arg );
#endif
#define err( format, arg... )\
printf( "error %d: " format "\n", __LINE__, ##arg )
int mindex = -1;
BOOL CH347_I2C_Init()
{
int ret = -1;
// Init CH347 I2C
ret = CH347I2C_Set(mindex, 3);// The IIC speed set 750K
if (!ret) {
err("Failed to init I2C");
return false;
}
return true;
}
BOOL EEPROM_Write()
{
ULONG i = 0;
ULONG DataLen = 0;
UCHAR DBuf[8 * 1024 + 16] = {0};
BOOL RetVal = false;
printf("Ready to write.\n");
for (i = 0; i <= 255; i++)
{
DBuf[i] = 255-i;
DataLen++;
}
printf("Write EEPROM data:\n");
RetVal = CH347WriteEEPROM(mindex,ID_24C02,0x00,DataLen,DBuf);
for (i = 0; i <= 255; i++)
{
printf("%02x ", DBuf[i]);
if (((i+1) % 20) == 0)
putchar(10);
}
putchar(10);
return RetVal;
}
BOOL EEPROM_Read()
{
ULONG i = 0;
ULONG DataLen = 256;
UCHAR DBuf[8 * 1024 + 16] = {0};
BOOL RetVal = false;
RetVal = CH347ReadEEPROM(mindex,ID_24C02,0,DataLen,DBuf);
printf("Read EEPROM data:\n");
for (i = 0; i <= 255; i++)
{
printf("%02x ", DBuf[i]);
if (((i+1) % 20) == 0)
putchar(10);
}
putchar(10);
return RetVal;
}
int main()
{
BOOL ret = false;
// Open the device
mindex = CH347OpenDevice(0);
if (mindex < 0) {
printf("Failed to open device.\n");
return -1;
}
ret = CH347_I2C_Init();
if (!ret) {
err("Failed to init CH347 I2C.");
exit(-1);
}
printf("Enter EEPROM Test,EEPROM Type:24C02\n");
ret = EEPROM_Read();
if (!ret) {
err("Failed to read eeprom");
exit(-1);
}
ret = EEPROM_Write();
if (!ret) {
err("Failed to write eeprom");
exit(-1);
}
ret = EEPROM_Read();
if (!ret) {
err("Failed to read eeprom");
exit(-1);
}
// Close the CH347 Device
if (CH347CloseDevice(mindex))
{
printf("Close device succesed\n");
}
return 0;
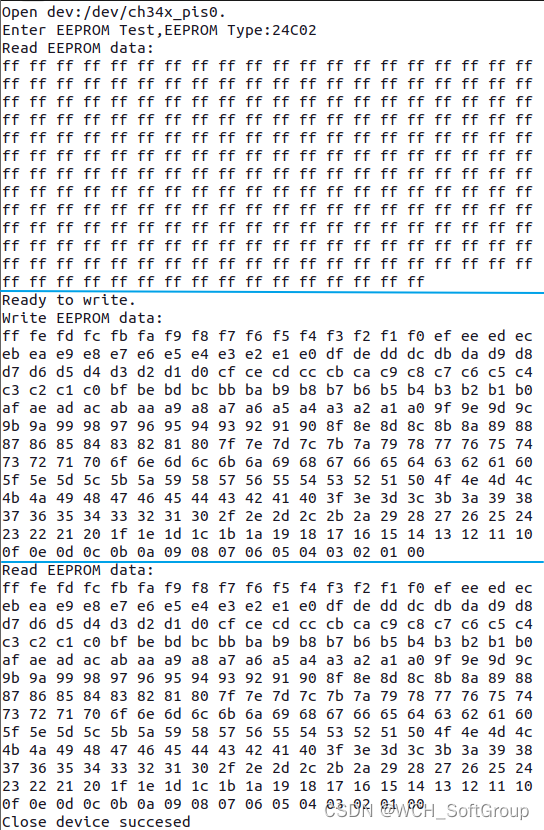
}执行截图: