目录
锁相环设计
全阶滑模的锁相环和前面的非线性磁链观测器锁相环原理类似,同样反正切函数计算方法包含除法运算,尤其是当反电动势观测值过零时,转子位置观测误差会进一步放大,这里采用锁相环来计算角度和电机速度。不同于磁链的锁相环,这里输入的从反电动势公式(4.2.9)可以看出,输入的幅值和频率都会受电机转速影响。
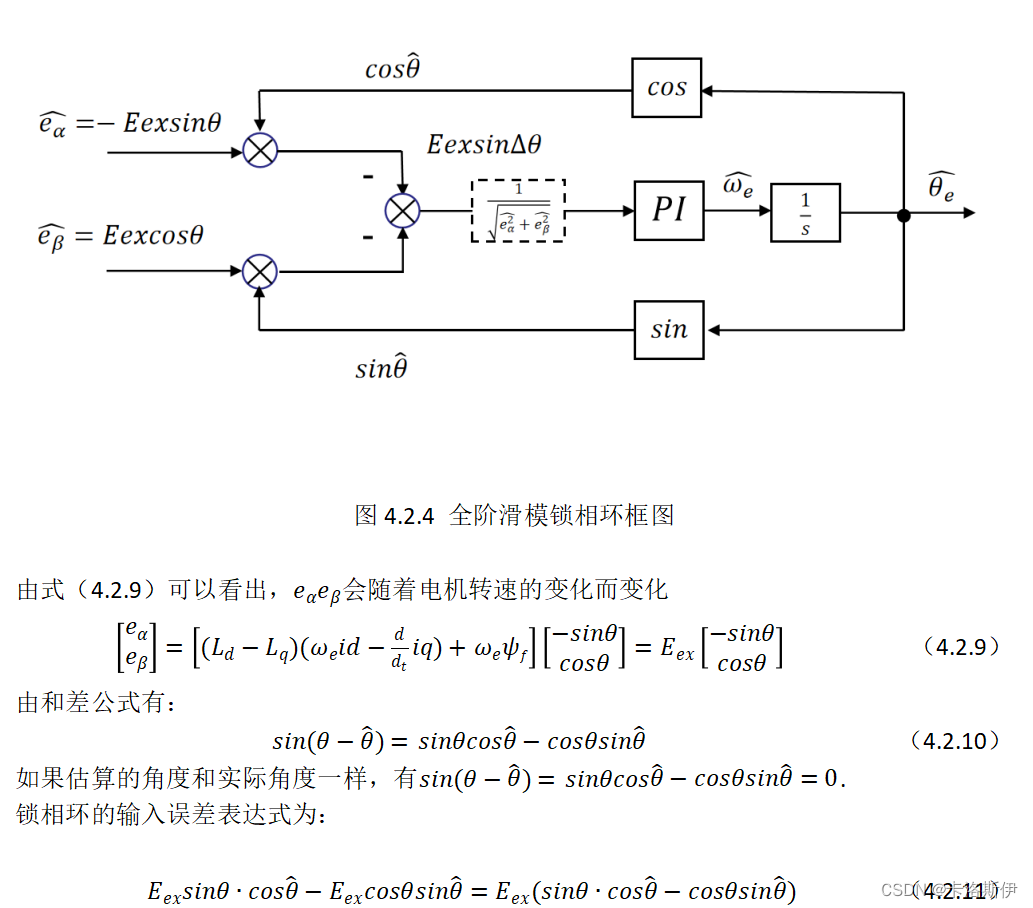
这里定义
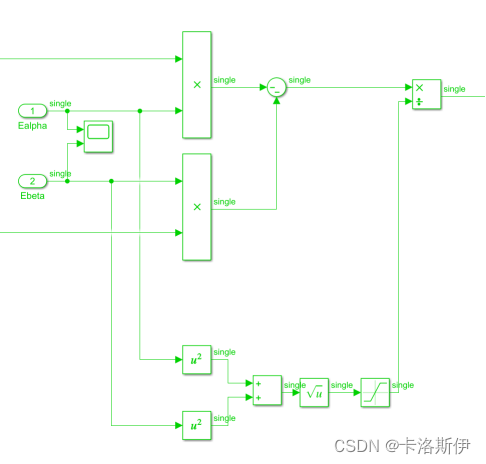
在设计锁相环时,输入误差会随着转速增大而增大,虽然由于PI的调整会不断接近0,但是会影响到观测器的带宽。这里通过归一化的方式,在输入误差阶段去掉量。通过模型实现如下:
参数设计
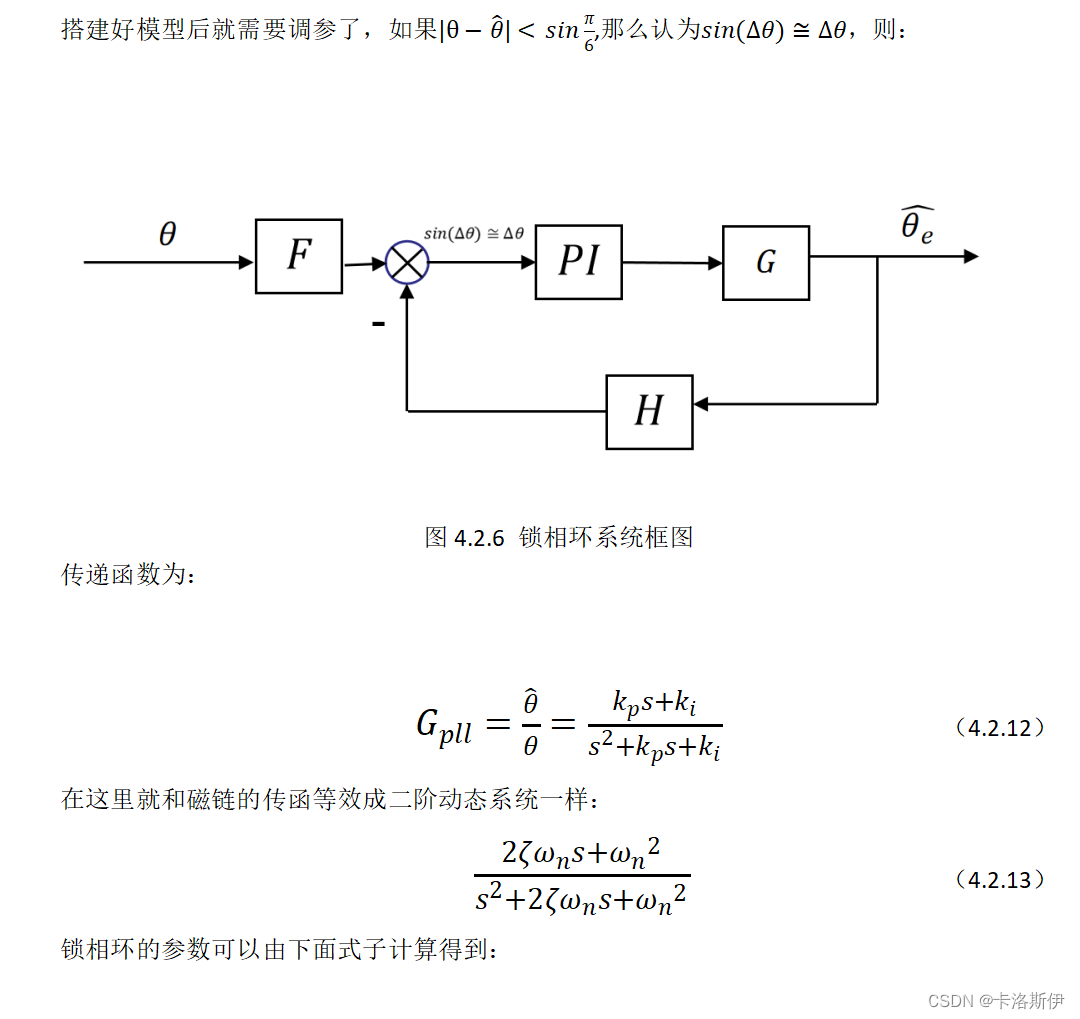

这里需要注意的是观测器的带宽和电机的角速度没有直接关系了,已经被归一化。也可以通过Simulink的环路设计工具设计参数,方法和磁链类似,这里就不再多说。
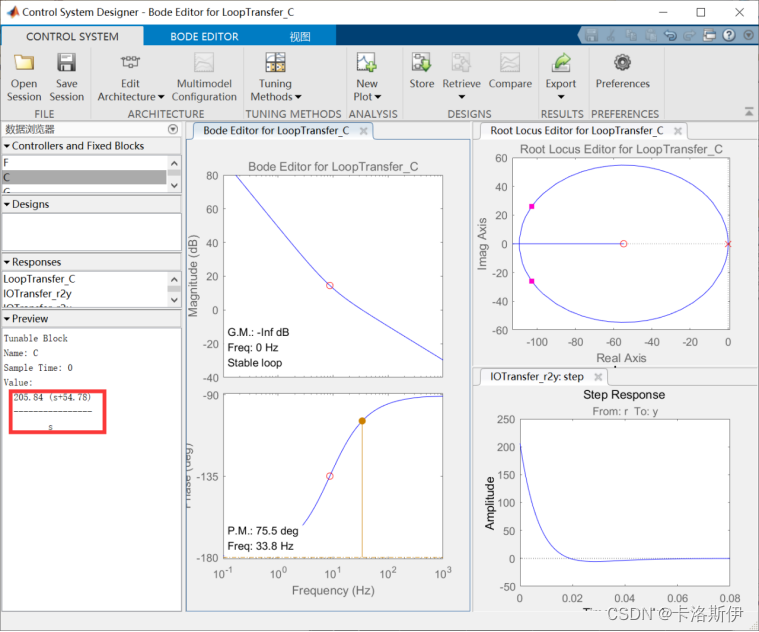
锁相环模型,导入Control System Designer设计的PI参数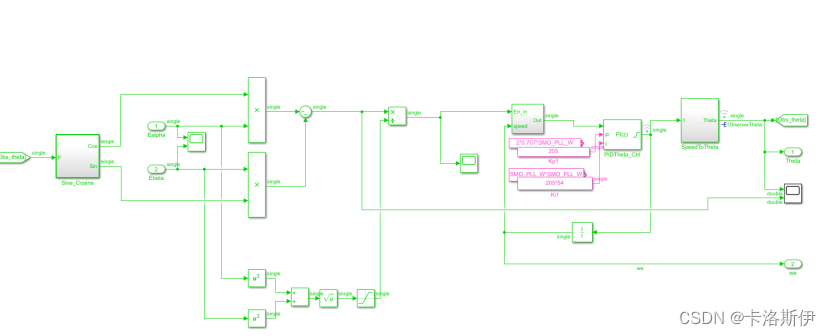
锁相环输出角度和实际角度对比: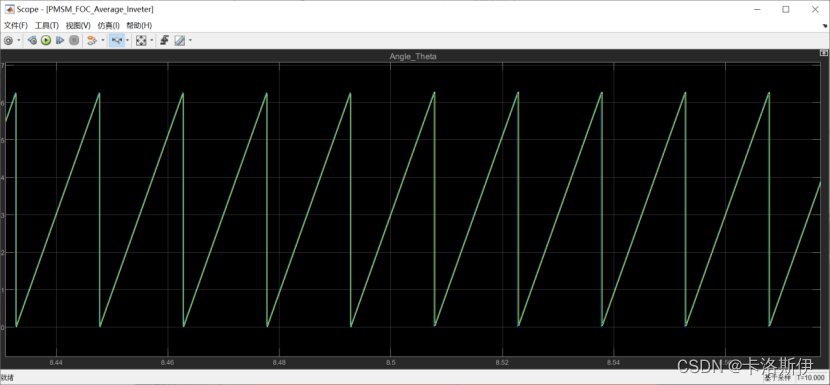
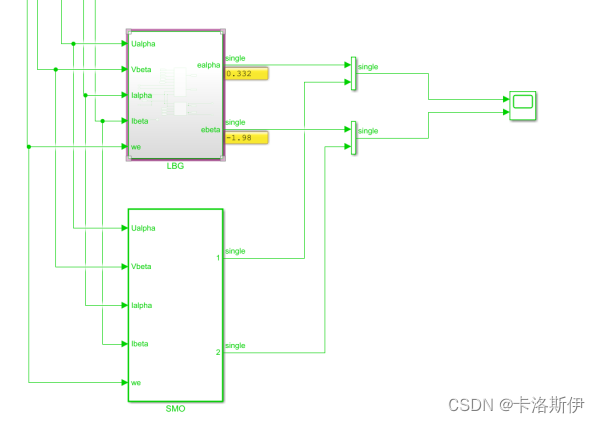
由此,那龙伯格也是基于反电动势的,这种方法也同样适用。如下是龙伯格和滑模的仿反电动势观测效果的对比:
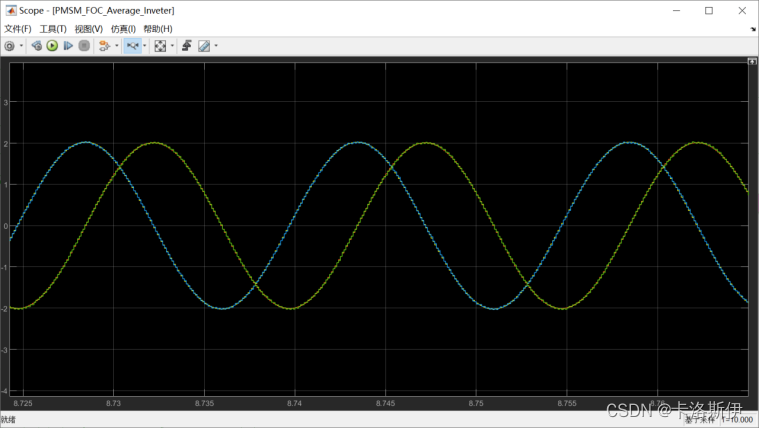
观测到的反电动势已经几乎完全重合在一起了。可以用同个锁相环计算角度和转速。
总结
通过和磁链锁相环相比,全阶滑模设计是有所不同的,不能想当然的直接用,要根据输入信号的特征具体分析。但对于都是基于反电动势的滑模和龙伯格是可以共用同一个锁相环的。
本文含有隐藏内容,请 开通VIP 后查看