HOG梯度直方图提取的卡车图像的特征可以很容易地识别车轮以及车辆的主要结构。
#放大缩小图片 img1=cv2.resize(img, (0, 0), fx=0.5, fy=0.5)
h, w = img.shape[:2] # 获取图片的high和weight
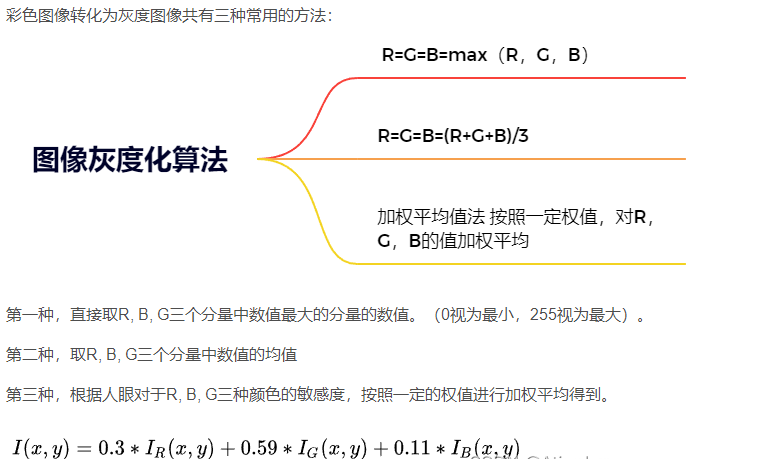
灰度化的过程就是将每个像素点的RGB值统一成同一个值。灰度化后的图像将由三通道变为单通道,单通道的数据处理起来就会简单许多。
灰度化,在RGB模型中,如果R=G=B时,则彩色表示一种灰度颜色,其中R=G=B的值叫灰度值,因此,灰度图像每个像素只需一个字节存放灰度值(又称强度值、亮度值),灰度范围为0-255。
方法一:读取图片时只读取灰度图像
方法二:调用opencv Api实现
方法三:算法实现图像灰度:gray = (B + G + R)/3
方法四:算法实现:gray = r*0.299 + g*0.587 + b*0.114
代码:
import cv2
import numpy as np
gray1 = cv2.imread('D:/pythonob/imageinpaint/img/zidan.jpg',0)#方法一
imgSrc = cv2.imread('D:/pythonob/imageinpaint/img/zidan.jpg',1)
gray2 = cv2.cvtColor(imgSrc,cv2.COLOR_BGR2GRAY)#方法二:API实现图像灰度。第二个参数:转换方式BGR-->gray
#方法三;算法实现图像灰度:gray = (B + G + R)/3
imgInfo = imgSrc.shape
height = imgInfo[0]
width = imgInfo[1]
gray3 = np.zeros((height,width,3),np.uint8)
for i in range(0,height):
for j in range(0,width):
(b,g,r) = imgSrc[i,j]
gray = (int(b) + int(g) + int(r))/3
gray3[i,j] = np.uint8(gray)
#方法四:gray = r*0.299 + g*0.587 + b*0.114
#优化:定点运算速度大于浮点运算速度,+-运算速度大于*/运算速度 #上式可以改为gray = (r*1 + g*2 + b*1)/4 即先乘四,再除以四(精度不高)可以改为乘以10,100,1000,10000等等 #进一步用移位表示:修改为-->gray = (r + (g<<1) + b)>>2 g*2即g左移一位,整体*4即整体右移2位
gray4 = np.zeros((height,width,3),np.uint8)
for i in range(0,height):
for j in range(0,width):
(b,g,r) = imgSrc[i,j]
gray = int(b)*0.114 + int(g)*0.587 + int(r)*0.299
gray4[i,j] = np.uint8(gray)
cv2.imshow('G1',gray1)
cv2.imshow('imgSrc',imgSrc)
cv2.imshow('G2',gray2)
cv2.imshow('G3',gray3)
cv2.imshow('G4',gray4)
cv2.waitKey(0)
本文含有隐藏内容,请 开通VIP 后查看