ROS中的imu数据(sensor_msgs/imu)一般为机体坐标系下,如果后续需要进行卡尔曼滤波等处理,需要先将其转换至世界坐标系中。借助ROS中tf工具里面的转换矩阵功能,可以较为简单的实现这一目的。(tf官方教程中是教用broadcaster与listener,个人感觉在这里有点大材小用且复杂化了)
代码全文
#include "ros/ros.h"
#include "sensor_msgs/Imu.h"
#include "geometry_msgs/Vector3.h"
#include "tf/tf.h"
void imu_fix_callback(const sensor_msgs::Imu::ConstPtr& data){
//将imu传感器中的四元数转换为tf工具中的四元数。顺序为x,y,z,w。
tf::Quaternion q1={data->orientation.x,data->orientation.y,data->orientation.z,data->orientation.w};
//通过四元数得到旋转矩阵
tf::Matrix3x3 r1;
r1.setRotation(q1);
geometry_msgs::Vector3 acc_world;//构建向量用于储存转换后的数据
//旋转矩阵右乘列向量获得转换后的向量
acc_world.x=(r1[0][0]*data->linear_acceleration.x)+(r1[0][1]*data->linear_acceleration.y)+(r1[0][2]*data->linear_acceleration.z);
acc_world.y=(r1[1][0]*data->linear_acceleration.x)+(r1[1][1]*data->linear_acceleration.y)+(r1[1][2]*data->linear_acceleration.z);
acc_world.z=(r1[2][0]*data->linear_acceleration.x)+(r1[2][1]*data->linear_acceleration.y)+(r1[2][2]*data->linear_acceleration.z);
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"test");
ros::NodeHandle nh;
ros::Subscriber sub=nh.subscribe("/mavros/imu/data",100,imu_fix_callback);
ros::spin();
return 0;
}代码比较简单,也带有注释,看到这里就看懂的就不需要继续往下看了。下面是代码更详细的解析与参考资料链接。
代码解析
int main(int argc,char **argv)
{
ros::init(argc,argv,"test");
ros::NodeHandle nh;
ros::Subscriber sub=nh.subscribe("/mavros/imu/data",100,imu_fix_callback);
ros::spin();
return 0;
}常规的消息订阅,没什么好讲的,刚入门的话建议去看 官方教程。
//将imu传感器中的四元数转换为tf工具中的四元数。顺序为x,y,z,w。
tf::Quaternion q1={data->orientation.x,data->orientation.y,data->orientation.z,data->orientation.w};
//通过四元数得到旋转矩阵
tf::Matrix3x3 r1;
r1.setRotation(q1);
quaternion是tf工具里面储存四元数的一个类,除直接输入x,y,z,w以外,也可以通过输入欧拉角进行设置(里面的setRPY函数)。tf::Quaternion Class Reference
matrix3x3是tf工具里面的3x3多功能矩阵,这里利用的是其通过四元数转换旋转矩阵的功能(setRotation)。详细官方文档在此:tf::Matrix3x3 Class Reference
//旋转矩阵右乘列向量获得转换后的向量
acc_world.x=(r1[0][0]*data->linear_acceleration.x)+(r1[0][1]*data->linear_acceleration.y)+(r1[0][2]*data->linear_acceleration.z);
acc_world.y=(r1[1][0]*data->linear_acceleration.x)+(r1[1][1]*data->linear_acceleration.y)+(r1[1][2]*data->linear_acceleration.z);
acc_world.z=(r1[2][0]*data->linear_acceleration.x)+(r1[2][1]*data->linear_acceleration.y)+(r1[2][2]*data->linear_acceleration.z);这里的作用就是旋转矩阵与向量相乘。对应的矩阵运算为:
Matrix3x3对运算符[]进行了重载,可直接获得行向量(返回tf的vector类型),可以结合下图进行理解。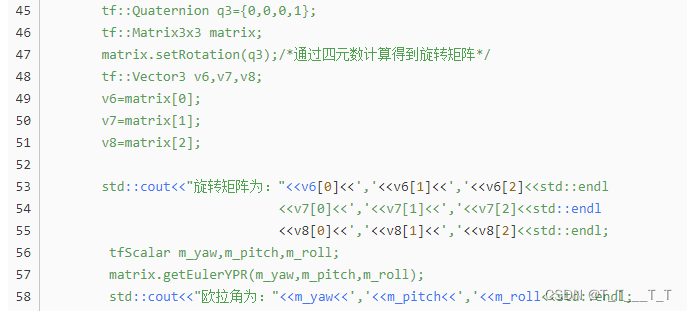
(图来源:ros tf 向量计算示例,欧拉角、四元数、转换矩阵之间的互转。里面还有更多情况下的转换,有兴趣的可以去看看原文。)
由于是小功能,代码就写的很随意与丑陋了,改进与优化的任务就留给读者自行解决了,希望能帮助到各位。如有疑问与纠错,欢迎在评论区留言。如需转载,标明出处且附上链接即可。
参考文献
ros tf 向量计算示例,欧拉角、四元数、转换矩阵之间的互转
tf::Quaternion Class Reference
本文含有隐藏内容,请 开通VIP 后查看