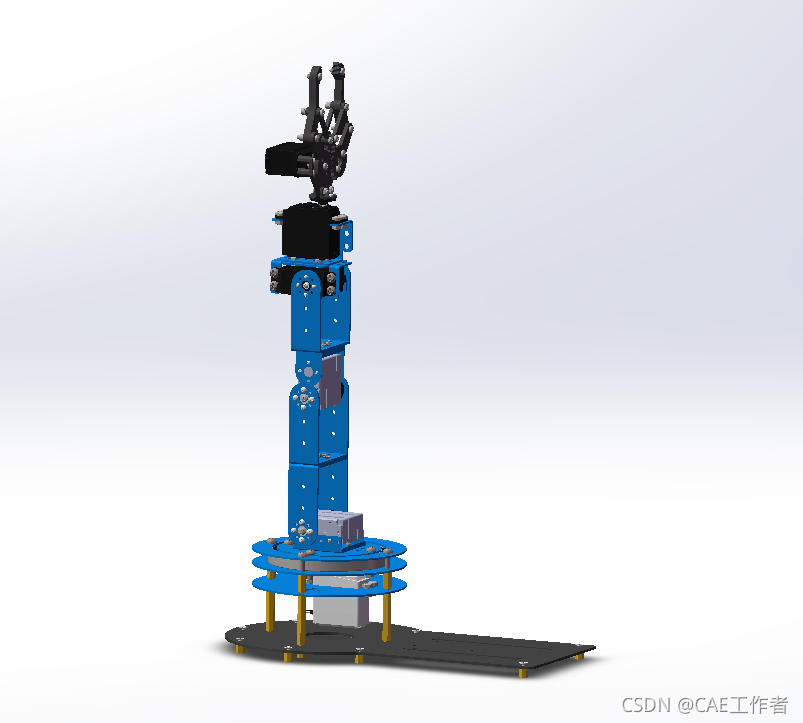
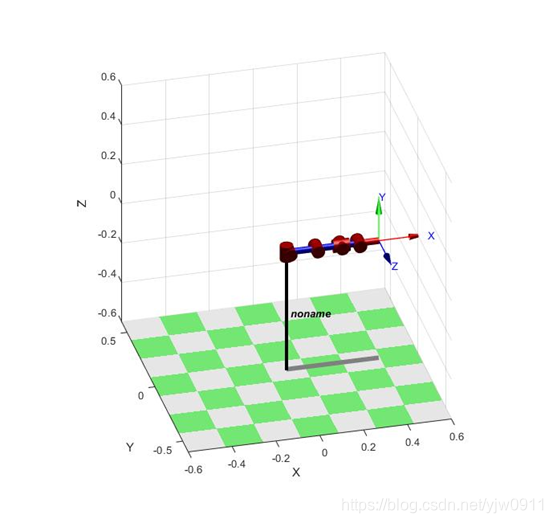
仿真模型建立
% Robotic Toolbox 9.10
clear
clc
L1=Link(‘d’, 0, ‘a’, 0.011, ‘alpha’, pi/2,‘offset’,0);
L2=Link(‘d’, 0, ‘a’, 0.126, ‘alpha’,0,‘offset’,0);
L3=Link(‘d’, 0, ‘a’, 0.1115, ‘alpha’,0,‘offset’,0);
L4=Link(‘d’, 0, ‘a’, 0, ‘alpha’,-pi/2,‘offset’,-pi/2);
L5=Link(‘d’, 0.0805, ‘a’, 0, ‘alpha’,pi/2,‘offset’,0);
L6=Link(‘d’, 0, ‘a’, 0.092, ‘alpha’,0,‘offset’,pi/2);
robot=SerialLink([L1,L2,L3,L4,L5,L6]);
init_ang=[0 0 0 0 0 0 ];
robot.plot(init_ang);
运动规划
1、关节空间轨迹规划:利用 matlab 机器人工具箱Robitcs Tool 中的轨迹规划函数jtraj,原理为五次多项插值算法。
P1起点:init_ang=[0 0 0 0 0 0 ];
P2终点:targ_ang=[pi/4,pi/2,pi/5,-pi/3,-pi/6,-pi/7];
init_ang=[0 0 0 0 0 0 ];
targ_ang=[pi/4,pi/2,pi/5,-pi/3,-pi/6,-pi/7];
step=50;
%%完整代码下载链接:包括分析word报告、matlab程序、三维模型、有限元分析报告
下载链接https://download.csdn.net/download/yjw0911/19775447
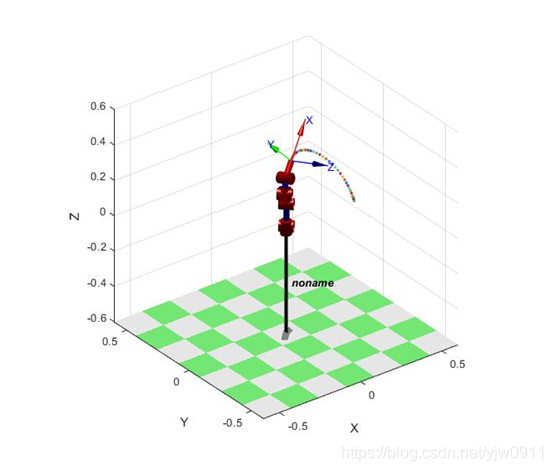
仿真模型与轨迹线
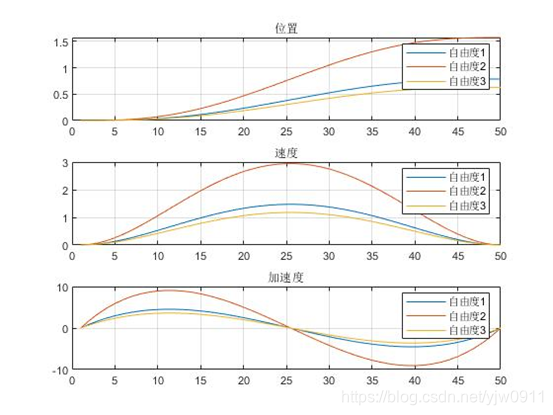
前三个自由度运动轨迹的对应位置、速度和加速度曲线
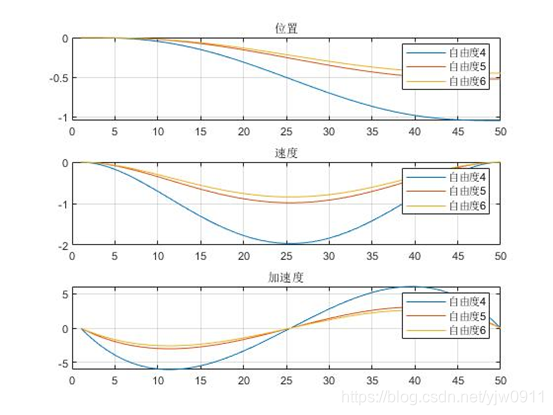
后三个自由度运动轨迹的对应位置、速度和加速度曲线
咨询链接:matlab正逆运动学分析与轨迹规划