Cuda elementwise
一、简介
1.1、ElementWise
Element-wise操作是最基础,最简单的一种核函数的类型,它的计算特点很符合GPU的工作方式:对于每个元素单独做一个算术操作,然后直接输出。虽然简单,但深度学习领域,有很多算子都是这个类型。常见的有Add,Mul,Concat,各种激活Sigmoid,Relu及它们的变体,归一化里的BatchNorm都属于这个类型。
1.2、 float4 - 向量化访存
所谓向量化访存,就是一次性读 4 个 float,而不是单单 1 个
要点:
- 小数据规模情况下,可以不考虑向量化访存的优化方式
- 大规模数据情况下,考虑使用向量化访存,且 最好是缩小grid的维度为原来的1/4,避免影响Occupancy
- float4 向量化访存只对数据规模大的时候有加速效果,数据规模小的时候没有加速效果
float4 的性能提升主要在于访存指令减少了(同样的数据规模,以前需要4条指令,现在只需1/4的指令),指令cache里就能存下更多指令,提高指令cache的命中率。
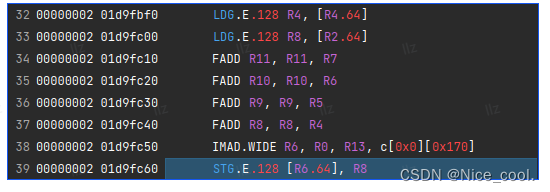
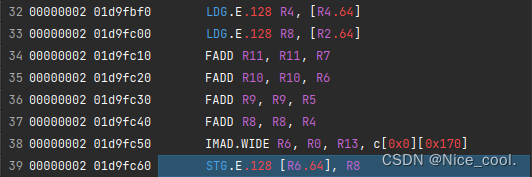
判断是否用上了向量化访存,是在 nsight compute 看生成的SASS代码里会有没有 LDG.E.128 Rx, [Rx.64]或 STG.E.128 [R6.64], Rx这些指令的存在。有则向量化成功,没有则向量化失败。
二、实践
2.1、如何使用向量化访存
c :
#define FLOAT4(value) *(float4*)(&(value))
宏解释:
对于一个值,先对他取地址,然后再把这个地址解释成 float4
对于这个 float4的指针,对它再取一个值
这样编译器就可以一次读四个 float
c++ :
#define FLOAT4(value) (reinterpret_cast<float4*>(&(value))[0])
将核函数写成 float4 的形式的时候,首先要先使用宏定义,其次要注意线程数的变化。
线程数变化原因:因为一个线程可以处理 4个float了,所以要减少 四倍的线程。 (具体看下面的例子)
2.2、Cuda elementwise - Add
2.3、Cuda elementwise - Sigmoid
2.3.1、简单的 Sigmoid 函数
a: Nx1, b: Nx1, c: Nx1, c = sigmoid(a, b)
//sigmoid<<<CeilDiv(N, block_size), block_size>>>(d_A, d_B, N)
//
__global__ void sigmoid(float* x, float* y, int N) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) y[idx] = 1.0f / (1.0f + expf(-x[idx]));
}
2.3.2、ElementWise Sigmoid+ float4(向量化访存)
Sigmoid x: N, y: N y=1/(1+exp(-x)) float4
__global__ void sigmoid_vec4(float4* x, float4* y, int N) {
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 4;
if (idx < N) {
float4 tmp_x = FLOAT4(x[idx]);
float4 tmp_y;
tmp_y.x = 1.0f / (1.0f + expf(-tmp_x.x));
tmp_y.y = 1.0f / (1.0f + expf(-tmp_x.y));
tmp_y.z = 1.0f / (1.0f + expf(-tmp_x.z));
tmp_y.w = 1.0f / (1.0f + expf(-tmp_x.w));
FLOAT4(y[idx]) = tmp_y;
}
}
2.4、Cuda elementwise - relu
2.3.1、简单的 relu 函数
Relu x: N, y: N y=max(0,x)
__global__ void relu(float* x, float* y, int N) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) y[idx] = fmaxf(0.0f, x[idx]);
}
2.3.2、ElementWise relu + float4(向量化访存)
Relu x: N, y: N y=max(0,x) float4
__global__ void relu_float4(float* x, float* y, int N) {
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 4;
if (idx < N) {
float4 tmp_x = FLOAT4(x[idx]);
float4 tmp_y;
tmp_y.x = fmaxf(0.0f, tmp_x.x);
tmp_y.y = fmaxf(0.0f, tmp_x.y);
tmp_y.z = fmaxf(0.0f, tmp_x.z);
tmp_y.w = fmaxf(0.0f, tmp_x.w);
FLOAT4(y[idx]) = tmp_y;
}
}
三、不能使用向量化访存的情况
Cuda elementwise - Histogram(直方图)
x[i] = i
-
- -
- - -
- - - -
- - - - -
goal: 统计每个元素出现的次数
①、简单的 Histogram函数
x: Nx1, y: count histogram
__global__ void histogram(int* x, int* y, int N) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) atomicAdd(&(y[x[idx]]), 1);
}
其中 int atomicAdd(int* address, int val);
1、atomicAdd 是 CUDA 中的一个原子加函数,用于实现在多个线程同时修改同一个全局变量的情况下,保证数据一致性和正确性
2、该函数会将原始值和 val 相加,并将结果存储在 address 所指向的内存位置,同时返回原始值
3、当多个线程同时调用 atomicAdd 函数时,CUDA 会自动为它们创建一个硬件级的同步访问机制,从而避免了数据竞争和数据不一致性的问题。
②、ElementWise Histogram + float4(向量化访存)
__global__ void histogram_float4(int* x, int* y, int N) {
int idx = 4 * (blockIdx.x * blockDim.x + threadIdx.x);
if (idx < N) {
int4 tmp_y = INT4(x[idx]);
atomicAdd(&(y[tmp_y.x]), 1);
atomicAdd(&(y[tmp_y.y]), 1);
atomicAdd(&(y[tmp_y.z]), 1);
atomicAdd(&(y[tmp_y.w]), 1);
}
}
运行 histogram_float4 后发现比 histogram 还慢。为什么呢?
1、nvidia 官方回答: Can float4 be used for atomicAdd efficiently?
2、histogram的写入(load)没有向量化指令,只有读取(load)向量化。
3、使用 nsight compute 看生成的SASS,只有 LDG ,没有STG
4、在一个warp里相邻线程对全局内存y的访问没有合并( 因为在一个warp里面不同线程对全局内存是跳着访问的 )
四、完整代码
4.1、sigmoid.cu
#include <stdio.h>
#include <stdlib.h>
#include <float.h>
#include <vector>
#include<assert.h>
#include <algorithm>
#include <cublas_v2.h>
#include <cuda_runtime.h>
#define FLOAT4(value) *(float4*)(&(value))
#define checkCudaErrors(func) \
{ \
cudaError_t e = (func); \
if(e != cudaSuccess) \
printf ("%s %d CUDA: %s\n", __FILE__, __LINE__, cudaGetErrorString(e)); \
}
__global__ void relu(float* x, float* y, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if(idx < N) y[idx] = fmaxf(0.0f, x[idx]);
}
__global__ void relu_float4(float* x, float* y, int N){
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 4;
if(idx < N){
float4 tmp_x = FLOAT4(x[idx]);
float4 tmp_y;
tmp_y.x = fmaxf(0.0f, tmp_x.x);
tmp_y.y = fmaxf(0.0f, tmp_x.y);
tmp_y.z = fmaxf(0.0f, tmp_x.z);
tmp_y.w = fmaxf(0.0f, tmp_x.w);
FLOAT4(y[idx]) = tmp_y;
}
}
//nvcc -o sigmoid sigmoid.cu && ./sigmoid
//sigmoid<<<CeilDiv(N, block_size), block_size>>>(d_A, d_B, N)
//a: Nx1, b: Nx1, c: Nx1, c = sigmoid(a, b)
__global__ void sigmoid(float* a, float* b, int N) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < N) b[idx] = 1.0f / (1.0f + expf(-a[idx]));
}
__global__ void sigmoid_float4(float* a, float* b, int N)
{
int idx = (blockDim.x * blockIdx.x + threadIdx.x) * 4;
if(idx < N){
float4 tmp_a = FLOAT4(a[idx]);
float4 tmp_b;
tmp_b.x = 1.0f /(1.0f + expf(-tmp_a.x));
tmp_b.y = 1.0f /(1.0f + expf(-tmp_a.y));
tmp_b.z = 1.0f /(1.0f + expf(-tmp_a.z));
tmp_b.w = 1.0f /(1.0f + expf(-tmp_a.w));
FLOAT4(b[idx]) = tmp_b;
}
}
template <typename T>
inline T CeilDiv(const T& a, const T& b) {
return (a + b - 1) / b;
}
int main(){
size_t block_size = 128;
size_t N = 1 * 1024;
size_t bytes_A = sizeof(float) * N;
size_t bytes_B = sizeof(float) * N;
float* h_A = (float*)malloc(bytes_A);
float* h_B = (float*)malloc(bytes_B);
for( int i = 0; i < N; i++ ){
h_A[i] = (i / 666) * ((i % 2 == 0) ? 1: -1);
}
float* d_A;
float* d_B;
checkCudaErrors(cudaMalloc(&d_A, bytes_A));
checkCudaErrors(cudaMalloc(&d_B, bytes_B));
checkCudaErrors(cudaMemcpy( d_A, h_A, bytes_A, cudaMemcpyHostToDevice));
cudaEvent_t start, stop;
checkCudaErrors(cudaEventCreate(&start));
checkCudaErrors(cudaEventCreate(&stop));
float msec = 0;
int iteration = 1000;
checkCudaErrors(cudaEventRecord(start));
for(int i = 0; i < iteration; i++)
{
//sigmoid<<<CeilDiv(N, block_size), block_size>>>(d_A, d_B, N);
//sigmoid_float4<<<CeilDiv(N, block_size), block_size/4>>>(d_A, d_B, N);
sigmoid_float4<<<CeilDiv(N/4,block_size), block_size>>>(d_A, d_B, N);
}
checkCudaErrors(cudaEventRecord(stop));
checkCudaErrors(cudaEventSynchronize(stop));
checkCudaErrors(cudaEventElapsedTime(&msec, start, stop));
printf("sigmoid takes %.3f msec\n", msec/iteration);
checkCudaErrors(cudaMemcpy(h_B, d_B, bytes_B, cudaMemcpyDeviceToHost));
for(int i = 0; i < N; i++){
double err = fabs(h_B[i] - 1.0f/(1.0f + expf(-h_A[i])));
if(err > 1.e-6) {
printf("wrong answer!\n");
break;
}
}
cudaFree(d_A);
cudaFree(d_B);
free(h_A);
free(h_B);
return 0;
}
编译和运行代码:
nvcc -o sigmoid sigmoid.cu
./sigmoid
4.2、relu.cu
#include <stdio.h>
#include <stdlib.h>
#include <float.h>
#include <vector>
#include<assert.h>
#include <algorithm>
#include <cublas_v2.h>
#include <cuda_runtime.h>
#define FLOAT4(value) *(float4*)(&(value))
#define checkCudaErrors(func) \
{ \
cudaError_t e = (func); \
if(e != cudaSuccess) \
printf ("%s %d CUDA: %s\n", __FILE__, __LINE__, cudaGetErrorString(e)); \
}
//nvcc -o relu relu.cu && ./relu
//sigmoid<<<CeilDiv(N, block_size), block_size>>>(d_A, d_B, N)
//a: Nx1, b: Nx1, c: Nx1, y = relu(x)
__global__ void relu(float* x, float* y, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if(idx < N) y[idx] = fmaxf(0.0f, x[idx]);
}
__global__ void relu_float4(float* x, float* y, int N){
int idx = (blockIdx.x * blockDim.x + threadIdx.x) * 4;
if(idx < N){
float4 tmp_x = FLOAT4(x[idx]);
float4 tmp_y;
tmp_y.x = fmaxf(0.0f, tmp_x.x);
tmp_y.y = fmaxf(0.0f, tmp_x.y);
tmp_y.z = fmaxf(0.0f, tmp_x.z);
tmp_y.w = fmaxf(0.0f, tmp_x.w);
FLOAT4(y[idx]) = tmp_y;
}
}
template <typename T>
inline T CeilDiv(const T& a, const T& b) {
return (a + b - 1) / b;
}
int main(){
size_t block_size = 128;
size_t N = 1 * 1024;
size_t bytes_A = sizeof(float) * N;
size_t bytes_B = sizeof(float) * N;
float* h_A = (float*)malloc(bytes_A);
float* h_B = (float*)malloc(bytes_B);
for( int i = 0; i < N; i++ ){
h_A[i] = (i / 666) * ((i % 2 == 0) ? 1: -1);
}
float* d_A;
float* d_B;
checkCudaErrors(cudaMalloc(&d_A, bytes_A));
checkCudaErrors(cudaMalloc(&d_B, bytes_B));
checkCudaErrors(cudaMemcpy( d_A, h_A, bytes_A, cudaMemcpyHostToDevice));
cudaEvent_t start, stop;
checkCudaErrors(cudaEventCreate(&start));
checkCudaErrors(cudaEventCreate(&stop));
float msec = 0;
int iteration = 1000;
checkCudaErrors(cudaEventRecord(start));
for(int i = 0; i < iteration; i++)
{
//relu<<<CeilDiv(N, block_size), block_size>>>(d_A, d_B, N);
//relu_float4<<<CeilDiv(N, block_size), block_size/4>>>(d_A, d_B, N);
relu_float4<<<CeilDiv(N/4, block_size), block_size>>>(d_A, d_B, N);
}
checkCudaErrors(cudaEventRecord(stop));
checkCudaErrors(cudaEventSynchronize(stop));
checkCudaErrors(cudaEventElapsedTime(&msec, start, stop));
printf("relu takes %.3f msec\n", msec/iteration);
checkCudaErrors(cudaMemcpy(h_B, d_B, bytes_B, cudaMemcpyDeviceToHost));
for(int i = 0; i < N; i++){
double err = fabs(h_B[i] - fmaxf(0.0f, h_A[i]));
if(err > 1.e-6) {
printf("wrong answer!\n");
break;
}
}
cudaFree(d_A);
cudaFree(d_B);
free(h_A);
free(h_B);
return 0;
}
编译和运行代码:
nvcc -o relu relu.cu
./relu
4.3、histogram.cu
#include <stdio.h>
#include <stdlib.h>
#include <float.h>
#include <vector>
#include<assert.h>
#include <algorithm>
#include <cublas_v2.h>
#include <cuda_runtime.h>
#define INT4(value) *(int4*)(&(value))
#define FLOAT4(value) *(float4*)(&(value))
#define checkCudaErrors(func) \
{ \
cudaError_t e = (func); \
if(e != cudaSuccess) \
printf ("%s %d CUDA: %s\n", __FILE__, __LINE__, cudaGetErrorString(e)); \
}
/*
x[i] = i
-
- -
- - -
- - - -
- - - - -
考虑一个warp里相邻线程对全局内存y的访问是否合并(coalesced global access)
warp thread[0]: 0, 1, 2, 3,
warp thread[1]: 4, 5, 6, 7
*/
__global__ void histogram(int* x, int* y, int N){
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if(idx < N) atomicAdd(&y[x[idx]], 1);
}
__global__ void histogram_int4(int* x, int* y, int N) {
int idx = 4 * (blockIdx.x * blockDim.x + threadIdx.x);
if (idx < N) {
int4 tmp_y = INT4(x[idx]);
atomicAdd(&(y[tmp_y.x]), 1);
atomicAdd(&(y[tmp_y.y]), 1);
atomicAdd(&(y[tmp_y.z]), 1);
atomicAdd(&(y[tmp_y.w]), 1);
}
}
template <typename T>
inline T CeilDiv(const T& a, const T& b) {
return (a + b - 1) / b;
}
int main(){
size_t block_size = 128;
size_t N = 32 * 1024 * 1024;
size_t bytes_A = sizeof(int) * N;
size_t bytes_B = sizeof(int) * N;
int* h_A = (int*)malloc(bytes_A);
int* h_B = (int*)malloc(bytes_B);
for( int i = 0; i < N; i++ ){
h_A[i] = i;
}
int* d_A;
int* d_B;
checkCudaErrors(cudaMalloc(&d_A, bytes_A));
checkCudaErrors(cudaMalloc(&d_B, bytes_B));
checkCudaErrors(cudaMemcpy( d_A, h_A, bytes_A, cudaMemcpyHostToDevice));
cudaEvent_t start, stop;
checkCudaErrors(cudaEventCreate(&start));
checkCudaErrors(cudaEventCreate(&stop));
float msec = 0;
int iteration = 1;
checkCudaErrors(cudaEventRecord(start));
for(int i = 0; i < iteration; i++){
//histogram<<<CeilDiv(N, block_size), block_size>>>(d_A, d_B, N);
//histogram_int4<<<CeilDiv(N, block_size), block_size/4>>>(d_A, d_B, N);
histogram_int4<<<CeilDiv(N/4, block_size), block_size>>>(d_A, d_B, N);
}
checkCudaErrors(cudaEventRecord(stop));
checkCudaErrors(cudaEventSynchronize(stop));
checkCudaErrors(cudaEventElapsedTime(&msec, start, stop));
printf("histogram takes %.3f msec\n", msec/iteration);
checkCudaErrors(cudaMemcpy(h_B, d_B, bytes_B, cudaMemcpyDeviceToHost));
for(int i = 0; i < N; i++){
//all ones;
double err = fabs(h_B[i] - iteration * 1.0f);
if(err > 1.e-6) {
printf("wrong answer!\n");
break;
}
}
cudaFree(d_A);
cudaFree(d_B);
free(h_A);
free(h_B);
return 0;
}
编译和运行代码:
nvcc -o histogram histogram.cu
./histogram