目录
- 0 专栏介绍
- 1 什么是碰撞时间?
- 2 一维TTC计算模型
- 3 二维TTC计算模型
- 4 算法仿真
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 什么是碰撞时间?
碰撞时间(Time-to-Collision, TTC)是驾驶行为研究中常用的重要概念,指交通流上两个物体在当前运动状态下的预测性碰撞时间,用于评估物体间的接近程度、交互强度和潜在的碰撞风险,常用于交通流畅性和安全性分析的重要风险指标,并为轨迹规划和决策提供量化依据。举例而言,在自动辅助驾驶系统(Autonomous Driving Assistance System, ADAS)中,基于TTC的预警流程为:实时地计算出本车与障碍车的TTC指标,当TTC小于前向碰撞预警阈值时,系统采用视觉、听觉或触觉向驾驶员报警;当TTC小于自动紧急制动阈值时,系统以一定的减速度采取紧急制动。

2 一维TTC计算模型
考虑自车的前方车辆且假设两车加速度恒定,基于运动学公式,两车经过相同的时间 t t t的实时位置为
{ x 1 ∗ = x 1 + v 1 t + 1 2 a 1 t 2 x 2 ∗ = x 2 + v 2 t + 1 2 a 2 t 2 ( x 1 < x 2 ) \begin{cases} x_{1}^{*}=x_1+v_1t+\frac{1}{2}a_1t^2\\ x_{2}^{*}=x_2+v_2t+\frac{1}{2}a_2t^2\\\end{cases}\left( x_1<x_2 \right) {x1∗=x1+v1t+21a1t2x2∗=x2+v2t+21a2t2(x1<x2)
令二者之差为安全距离 d = x 2 ∗ − x 1 ∗ d=x_{2}^{*}-x_{1}^{*} d=x2∗−x1∗,则解得二次方程为
t t c = { x 2 − x 1 − d v 1 − v 2 , a 1 = a 2 − ( v 1 − v 2 ) + ( v 1 − v 2 ) 2 + 2 ( a 1 − a 2 ) ( x 2 − x 1 − d ) a 1 − a 2 , a 1 ≠ a 2 ttc=\begin{cases} \frac{x_2-x_1-d}{v_1-v_2}, a_1=a_2\\ \frac{-\left( v_1-v_2 \right) +\sqrt{\left( v_1-v_2 \right) ^2+2\left( a_1-a_2 \right) \left( x_2-x_1-d \right)}}{a_1-a_2}, a_1\ne a_2\\\end{cases} ttc={v1−v2x2−x1−d,a1=a2a1−a2−(v1−v2)+(v1−v2)2+2(a1−a2)(x2−x1−d),a1=a2
考虑到有意义的 t t c > 0 ttc>0 ttc>0,可知
- 当 a 1 = a 2 a_1=a_2 a1=a2时,自车速度需要大于前车 v 1 > v 2 v_1>v_2 v1>v2;
- 当 a 1 ≠ a 2 a_1\ne a_2 a1=a2时,自车加速度需要大于前车 a 1 > a 2 a_1>a_2 a1>a2,即加速更快或减速更慢;
才会进入TTC预警流程。上述公式适合两车均在运动过程时的TTC计算,在前方减速行驶车辆追尾测试中,若两车最短距离发生在前车刹停后,则需要对上述公式进行修正
t t c ′ = { x 2 − x 1 − d + ∣ v 2 2 2 a 2 ∣ v 1 , a 1 = a 2 − v 1 + v 1 2 + 2 a 1 ( x 2 − x 1 − d + ∣ v 2 2 2 a 2 ∣ ) a 1 , a 1 ≠ a 2 ttc'=\begin{cases} \frac{x_2-x_1-d+\left| \frac{v_{2}^{2}}{2a_2} \right|}{v_1}, a_1=a_2\\ \frac{-v_1+\sqrt{v_{1}^{2}+2a_1\left( x_2-x_1-d+\left| \frac{v_{2}^{2}}{2a_2} \right| \right)}}{a_1}, a_1\ne a_2\\\end{cases} ttc′=⎩⎪⎪⎪⎨⎪⎪⎪⎧v1x2−x1−d+∣∣∣2a2v22∣∣∣,a1=a2a1−v1+v12+2a1(x2−x1−d+∣∣∣2a2v22∣∣∣),a1=a2

3 二维TTC计算模型
在一维情况下,TTC通过将相对碰撞距离(Distance-to-Collision, DTC)除以相对速度来计算。在二维情况下,DTC相应地指的是车辆包围盒沿其相对速度方向的最小距离。如果相对运动减小了距离,则说明它们彼此靠近,存在潜在的碰撞;反之则不存在。
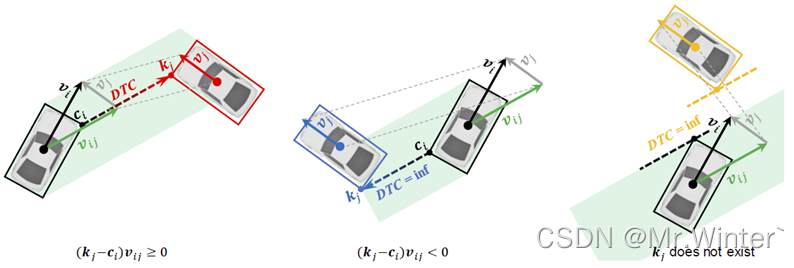
具体地,如图所示,设 i i i是目标车辆, j j j是交互车辆,相应的包围盒角点集合为 C i C_i Ci和 C j C_j Cj,边界集合为 B i B_i Bi和 B j B_j Bj。对每个目标车辆的角点
c i , m ∈ C i ( m = 1 , 2 , 3 , 4 ) \boldsymbol{c}_{i,m}\in C_i\left( m=1,2,3,4 \right) ci,m∈Ci(m=1,2,3,4)
沿着相对速度方向 v i j = v i − v j \boldsymbol{v}_{ij}=\boldsymbol{v}_i-\boldsymbol{v}_j vij=vi−vj延长,求该直线和车辆 j j j包围盒每条直线边的交点集合 K j K_j Kj,则
d i m → j n = { ∥ k j , n − c i , m ∥ , ( k j , n − c i , m ) T v i j ⩾ 0 i n f , ( k j , n − c i , m ) T v i j < 0 o r ∄ k j , n ∈ K j ∩ B j ≠ ⊘ d_{im\rightarrow jn}=\begin{cases} \left\| \boldsymbol{k}_{j,n}-\boldsymbol{c}_{i,m} \right\| , \left( \boldsymbol{k}_{j,n}-\boldsymbol{c}_{i,m} \right) ^T\boldsymbol{v}_{ij}\geqslant 0\\ \mathrm{inf}, \left( \boldsymbol{k}_{j,n}-\boldsymbol{c}_{i,m} \right) ^T\boldsymbol{v}_{ij}<0 \mathrm{or} \nexists \boldsymbol{k}_{j,n}\in K_j\cap B_j\ne \oslash\\\end{cases} dim→jn={∥kj,n−ci,m∥,(kj,n−ci,m)Tvij⩾0inf,(kj,n−ci,m)Tvij<0or∄kj,n∈Kj∩Bj=⊘
遍历所有的 c i , m ∈ C i \boldsymbol{c}_{i,m}\in C_i ci,m∈Ci和 k j , n ∈ K j \boldsymbol{k}_{j,n}\in K_j kj,n∈Kj可得 D i → j \boldsymbol{D}_{i\rightarrow j} Di→j,从而碰撞距离
d t c = min { min { D i → j } , min { D j → i } } dtc=\min \left\{ \min \left\{ \boldsymbol{D}_{i\rightarrow j} \right\} ,\min \left\{ \boldsymbol{D}_{j\rightarrow i} \right\} \right\} dtc=min{min{Di→j},min{Dj→i}}
以及碰撞时间
t t c = { d t c ∥ v i j ∥ , d t c ≠ i n f i n f , d t c = i n f ttc=\begin{cases} \frac{dtc}{\left\| \boldsymbol{v}_{ij} \right\|}, dtc\ne \mathrm{inf}\\ \mathrm{inf}, dtc=\mathrm{inf}\\\end{cases} ttc={∥vij∥dtc,dtc=infinf,dtc=inf
4 算法仿真
考虑到一维TTC计算是简单的代数公式,这里仅给出2D TTC计算的代码。核心的计算目标车辆 i i i和交互车辆 j j j的代码如下所示
def TTC_ij(samples):
point_i1, point_i2, point_i3, point_i4, point_j1, point_j2, point_j3, point_j4 = getpoints(samples)
direct_v = (samples[['vx_i','vy_i']].values - samples[['vx_j','vy_j']].values).T
dist_mat = []
leaving_mat = []
for point_line_start in [point_i1,point_i2,point_i3,point_i4]:
for edge_start, edge_end in zip([point_j1, point_j3, point_j1, point_j2],[point_j2, point_j4, point_j3, point_j4]):
point_line_end = point_line_start+direct_v
ist = intersect(line(point_line_start, point_line_end), line(edge_start, edge_end))
ist[:,~ison(edge_start, edge_end, ist)] = np.nan
dist_ist = np.sqrt((ist[0]-point_line_start[0])**2+(ist[1]-point_line_start[1])**2)
dist_ist[np.isnan(dist_ist)] = np.inf
dist_mat.append(dist_ist)
leaving = direct_v[0]*(ist[0]-point_line_start[0]) + direct_v[1]*(ist[1]-point_line_start[1])
leaving[leaving>=0] = 10
leaving[leaving<0] = 1
leaving_mat.append(leaving)
dist2overlap = np.array(dist_mat).min(axis=0)
TTC = dist2overlap/np.sqrt((samples.vx_i-samples.vx_j)**2+(samples.vy_i-samples.vy_j)**2)
leaving = np.nansum(np.array(leaving_mat),axis=0)
TTC[leaving<10] = np.inf
TTC[(leaving>10)&(leaving%10!=0)] = -1
return TTC
一维案例
两辆车的尺寸均为
3m长、1m宽且均沿正前方行驶,前车位于(2,1)坐标处且速度为1m/s,后车位于(-2,1)且速度为3m/s,计算碰撞时间test_sampe = pd.DataFrame( data=np.array([ 2, 1, 1, 0, 1, 0, 3, 1, -2, 1, 3, 0, 1, 0, 3, 1 ]).reshape(1, 16), columns=[ "x_i", "y_i", "vx_i", "vy_i", "hx_i", "hy_i", "length_i", "width_i", "x_j", "y_j", "vx_j", "vy_j", "hx_j", "hy_j", "length_j", "width_j" ] ) print(TTC(test_sampe, toreturn="values")) >>> TTC=0.5 s二维案例
两辆车的尺寸均为3m长、1m宽,前车位于(2,1)坐标处,速度为1m/s且沿正前方行驶;后车位于(2,1-),速度为1m/s且沿前方45°行驶,计算碰撞时间test_sampe = pd.DataFrame( data=np.array([ 2, 1, 1, 0, 1, 0, 3, 1, 2, -2, 1, 1, 1, 1, 3, 1 ]).reshape(1, 16), columns=[ "x_i", "y_i", "vx_i", "vy_i", "hx_i", "hy_i", "length_i", "width_i", "x_j", "y_j", "vx_j", "vy_j", "hx_j", "hy_j", "length_j", "width_j" ] ) print(TTC(test_sampe, toreturn="values")) >>> TTC=1.085786 s
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏: