前言
现阶段自动驾驶技术中,主要用到的传感器有摄像头、激光雷达和毫米波雷达。
摄像头的光谱从可见光到红外光谱,是最接近人眼的传感器,有丰富的语义信息,在传感器中具有不可替代的作用,比如红绿灯识别、交通标识识别,都离不开摄像头的信息。
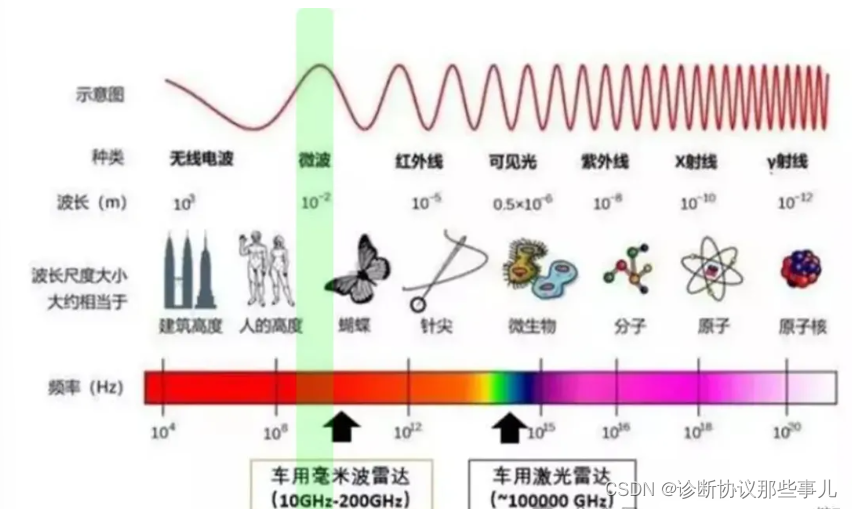
激光雷达器件较为成熟,905nm波段广泛应用,能获得丰富的场景立体空间信息。从频谱可以看到,激光在频谱上和可见光较为接近,因此和可见光有着相似的粒子特性,容易受到恶劣天气的影响。
毫米波雷达波长为3.9mm附近,是这几种传感器中波长最长的传感器,全天候性能最好,且具备速度探测优势。
一、4D毫米波雷达是什么?
了解毫米波雷达的同学首先会思考第一个问题:4D指的是什么?
4D 毫米波雷达中的“4D”是指:高度、距离、方位以及速度四个维度。相较传统毫米波雷达,4D 毫米波雷达增加了“高度”维度探测信息的输出。
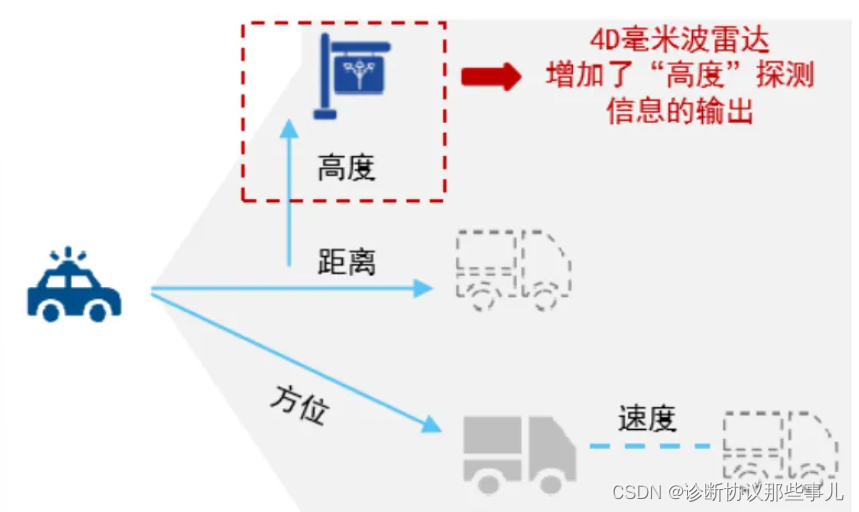
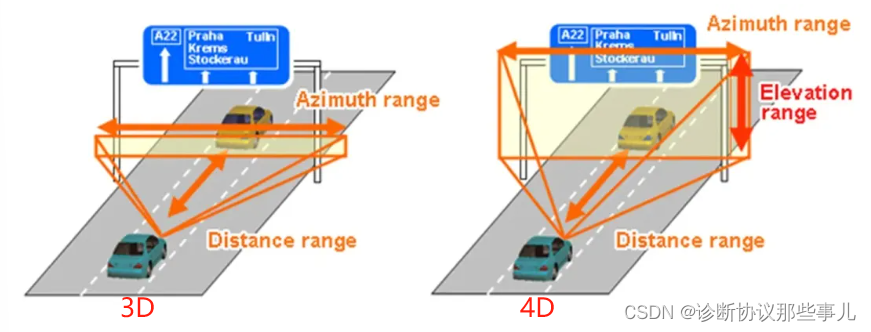
主流毫米波雷达主要功能为测角、测距与测速,故也称之为3D毫米波雷达。4D毫米波雷达相比传统雷达,增加了俯仰角的测量信息,并且角度分辨率可达到亚度(<1°)级别,能够通过输出大量的测量点清晰地呈现出目标障碍物的轮廓。
二、毫米波雷达是什么?
“雷达”一词源于RAdio Detection And Ranging的缩写Radar的音译。意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。
1936年1月,英国架起了第一个雷达站,用于监测德国战机。从此之后,雷达技术开始蓬勃发展。

汽车上主要使用24G、77G、79G这几个频段。
77GHz雷达系统的波长 λ 为:
λ = c /f = 3.9mm
在77GHz毫米波对应的:
1.大气衰减较小
2.波长短,雷达产品尺寸小
3.可用带宽大
毫米波雷达的基本原理
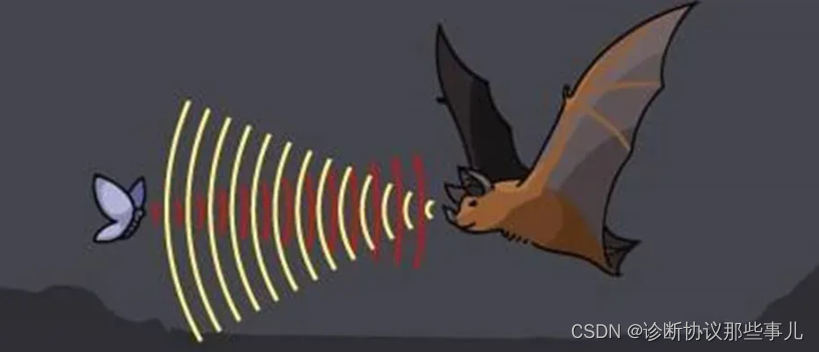
毫米波雷达通过发射电磁波,以及接收目标反射的电磁波,来实现目标检测。毫米波雷达的探测原理类似蝙蝠,只不过雷达发射的是电磁波,蝙蝠发出的是超声波。
雷达到目标距离R = c*t/2
多普勒效应
如果波源朝着观察者的方向行进,波峰间的距离越来越近(频率向上移动)时,如果波源正在远离观察者,则波峰间的距离越来越远(频率向下移动)。
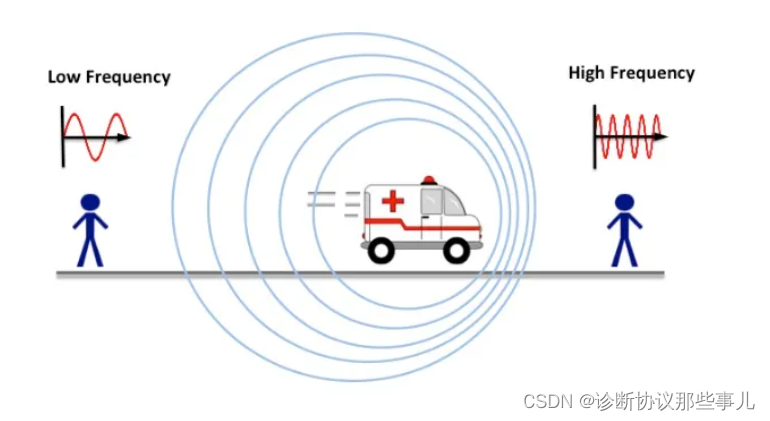
电磁波的频移 f 可以直接从原始波频率 f0和波源相对于观察者的速度v推导出来,表示如下:f = ( 1 + v/ c ) f 0
多普勒雷达的工作原理是通过发射天线发送一个频率,该频率被目标反射回来,由接收天线捕获。如果目标正在移动,则此接收到的信号频率将根据目标的速度移动。多普勒雷达的接收器使用一个特定的模块(混频器),它根据发射和接收的信号产生输出信号。该模块的输出具有一个频率,该频率等于发射信号和反射信号之间频率的绝对差,也称为多普勒频移。