目录
服务通信模型
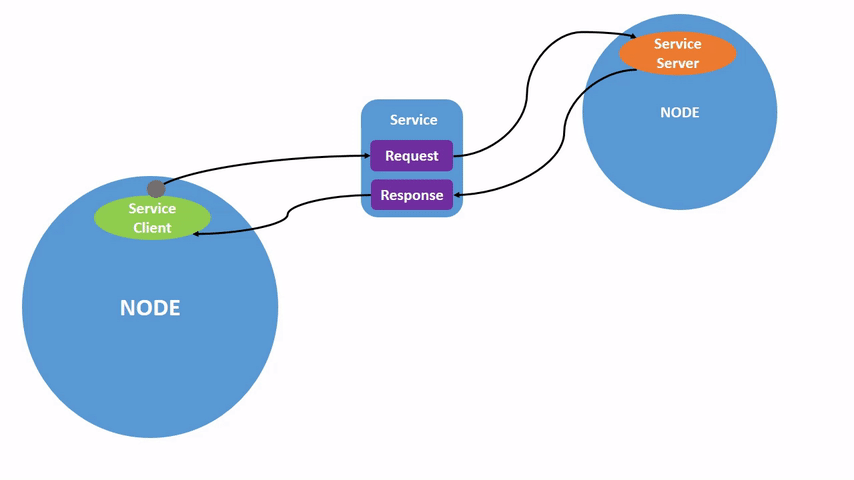
服务通信模型如上图所示,分为服务端和客户端,客户端根据需要向服务端发送请求(Request),服务端处理请求,并向客户端发回响应(Response)。一个服务端对应有多个客户端,并且消息的流向是双向的。
服务通信的C++实现
服务端
首先明确服务端的工作流程:服务端创建后被挂起,直到收到客户端请求后执行对应的任务,并返回响应结果
- 依赖
#include "rclcpp/rclcpp.hpp" //标准库
#include "自定义接口文件/srv/xxx.hpp" //消息接口库
using 自定义接口文件::srv::xxx; //命名空间
- 实现流程
1、节点类中声明服务端对象指针。
2、节点构造函数中创建服务端对象,并绑定回调函数。
3、 在回调函数中处理请求数据,并返回响应。
- 代码模板
#include "rclcpp/rclcpp.hpp"
#include "自定义节点包/srv/自定义消息.hpp"
using 自定义节点包::srv::自定义消息;
using namespace std::placeholders;
class My_Service : public rclcpp::Node{
private:
rclcpp::Service<消息类型>::SharedPtr service_; //1、节点类中声明服务端对象指针。
void srv_callback(const 自定义消息::Request::SharedPtr req,const 自定义消息::Response::SharedPtr res)//3、在回调函数中处理请求数据,并返回响应。
{
req->xxx; //请求数据解析
res->xxx= XXX; //响应数据发送
}
public:
My_Service():Node("test_service_node"){
service_ = this->create_service<消息类型>("服务名",std::bind(&My_Service::srv_callback,this,_1,_2));//2、节点构造函数中创建服务端对象,并绑定回调函数。
}
};
int main(int argc,char* argv[]){
rclcpp::init(argc,argv);
rclcpp::spin(std::make_shared<消息类型>()); //循环执行服务
rclcpp::shutdown();
return 0;
}
客户端
客户端的工作流程:客户端创建后择机发送请求数据,然后等待客户端返回响应信息。
- 依赖
#include "rclcpp/rclcpp.hpp" //标准库
#include "自定义接口文件/srv/xxx.hpp" //消息接口库
using 自定义接口文件::srv::xxx; //命名空间
- 实现流程
1、节点类中声明客户端对象指针。
2、节点构造函数中创建客户端对象。
3、 在调用客户端对象的发送方法,发送请求。
4、 阻塞等待返回结果,并解析Response数据
- 代码模板
#include "rclcpp/rclcpp.hpp"
#include "based_interfaces/srv/myservice.hpp" //自定义接口文件
using based_interfaces::srv::Myservice; //使用自定义消息的数据类型
using namespace std::chrono_literals;
class My_Client : public rclcpp::Node{
private:
rclcpp::Client<Myservice>::SharedPtr client_; //1、节点类中声明客户端对象指针。
public:
My_Client():Node("test_client_node"){
client_ = this->create_client<Myservice>("my_srv",10); //2、节点构造函数中创建客户端对象。
}
//等待连接到服务端
bool connect_srv(void){
while(!client_->wait_for_service(1s)){
if(!rclcpp::ok())
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"程序结束!");
return false;
}
RCLCPP_INFO(this->get_logger(),"等待连接中");
}
RCLCPP_INFO(this->get_logger(),"连接成功");
return true;
}
//3、 在调用客户端对象的发送方法,发送请求。
rclcpp::Client<Myservice>::FutureAndRequestId send_data(std::string message){
auto request = std::make_shared<Myservice::Request>();
request->request_msg = message;
return client_->async_send_request(request);
}
};
int main(int argc,char* argv[]){
rclcpp::init(argc,argv);
auto myclient = std::make_shared<My_Client>();
if(myclient->connect_srv()){
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"连接成功");
// 4、 阻塞等待返回结果,并解析Response数据
auto response = myclient->send_data(argv[1]);
if(rclcpp::spin_until_future_complete(myclient,response)==rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"请求成功!");
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"返回:%s!",response.get()->respone_msg.c_str());
}else
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"请求异常!");
}
else
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"连接失败!");
rclcpp::shutdown();
return 0;
}
关键函数说明
- 定义客户端与服务端对象
rclcpp::Service<消息类型>::SharedPtr service_;
rclcpp::Client<消息类型>::SharedPtr client_;
- 服务端与客户端对象创建
==回调函数传入两个参数(请求与响应的指针):const 自定义消息::Request::SharedPtr req,const 自定义消息::Response::SharedPtr res,顺序不可以搞错!==
service_ = this->create_service<消息类型>("服务名",std::bind(&My_Service::srv_callback,this,_1,_2));
//
client_ = this->create_client<消息类型>("服务名",10);
- 服务端等待连接函数
client->wait_for_service(xxs);相当于xx秒的阻塞延时,如果在这段时间内如果连接上服务就返回true,否则返回false。 - 服务端发送数据函数
auto response = client_->async_send_request(request);,其中response的类型为: rclcpp::Client<消息类型>::FutureAndRequestId。
response.get()->xxx获取响应数据内容。 - 客户端等待响应数据
rclcpp::spin_until_future_complete(node_name,response),这里的response是async_send_request函数的返回值。
函数返回值类型为rclcpp::FutureReturnCode,其下有SUCCESS, INTERRUPTED, TIMEOUT三种类型,分别代表不同的服务返回状态。
