注:本文为 “线性代数 ” 相关合辑。
图片清晰度受引文原图所限。
略作重排,未整理去重。
如有内容异常,请看原文。
【机器学习】【线性代数】正交基、标准正交基、正交矩阵、正交变换等数学知识点-CSDN博客
CV_ML_DP 于 2018-05-28 09:30:08 发布
摘要
本文详细介绍了正交向量、正交基、标准正交基等概念,阐述了正交矩阵及其特性,解释了正交变换的定义及应用,包括其对向量长度与夹角的影响,为线性代数在机器学习领域的应用提供了基础理论支撑。
1. 正交向量组
定义:设欧式空间 V V V 中的一组非零向量 α 1 , α 2 , … , α k \alpha_1, \alpha_2, \dots, \alpha_k α1,α2,…,αk,若对任意 i ≠ j i \neq j i=j,都有内积 ( α i , α j ) = 0 (\alpha_i, \alpha_j) = 0 (αi,αj)=0(即向量两两正交),则称该向量组为正交向量组。
正交向量组具有以下核心性质:
- 正交向量组是线性无关的。
- n n n 维欧式空间中,两两正交的非零向量个数不会超过 n n n,即 n n n 维欧式空间中一个正交向量组最多包含 n n n 个向量。
2. 正交基
定义:在 n n n 维欧式空间 V V V 中,若一个正交向量组恰好包含 n n n 个非零向量,则该正交向量组称为 n n n 维欧式空间 V V V 的正交基。
3. 标准正交基
定义:在 n n n 维欧式空间 V V V 中,若一个正交向量组满足两个条件——包含 n n n 个向量、每个向量均为单位向量(即向量的模长 ∥ α i ∥ = 1 \|\alpha_i\| = 1 ∥αi∥=1),则该正交向量组称为 n n n 维欧式空间 V V V 的标准正交基。
示例:3 维欧式空间 R 3 \mathbb{R}^3 R3 中,向量组 { ( 1 , 0 , 0 ) , ( 0 , 1 , 0 ) , ( 0 , 0 , 1 ) } \{(1,0,0), (0,1,0), (0,0,1)\} {(1,0,0),(0,1,0),(0,0,1)} 是标准正交基,理由如下:
向量两两正交:
( 1 , 0 , 0 ) ⋅ ( 0 , 1 , 0 ) = 0 (1,0,0) \cdot (0,1,0) = 0 (1,0,0)⋅(0,1,0)=0
( 1 , 0 , 0 ) ⋅ ( 0 , 0 , 1 ) = 0 (1,0,0) \cdot (0,0,1) = 0 (1,0,0)⋅(0,0,1)=0
( 0 , 1 , 0 ) ⋅ ( 0 , 0 , 1 ) = 0 (0,1,0) \cdot (0,0,1) = 0 (0,1,0)⋅(0,0,1)=0
每个向量均为单位向量:
∥ ( 1 , 0 , 0 ) ∥ = 1 2 + 0 2 + 0 2 = 1 \|(1,0,0)\| = \sqrt{1^2 + 0^2 + 0^2} = 1 ∥(1,0,0)∥=12+02+02=1,
同理 ∥ ( 0 , 1 , 0 ) ∥ = 1 \|(0,1,0)\| = 1 ∥(0,1,0)∥=1, ∥ ( 0 , 0 , 1 ) ∥ = 1 \|(0,0,1)\| = 1 ∥(0,0,1)∥=1;
向量个数等于空间维度(3 个)。
4. 单位矩阵
定义:若一个矩阵满足以下三个条件,则称该矩阵为单位矩阵,通常记作 E E E 或 I I I:
- 矩阵为方阵(即行数等于列数);
- 主对角线(从左上到右下的对角线)上的所有元素均为 1;
- 除主对角线外,其余位置的元素均为 0。
示例:3 阶单位矩阵 E 3 E_3 E3 可表示为:
E 3 = [ 1 0 0 0 1 0 0 0 1 ] E_3 = \begin{bmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} E3=
100010001
5. 正交矩阵
定义:若一个矩阵 A A A 满足以下两个条件,则称该矩阵为正交矩阵:
- 矩阵 A A A 为方阵;
- 矩阵 A A A 与其转置矩阵 A T A^T AT 的乘积等于单位矩阵 E E E,即 A A T = A T A = E A A^T = A^T A = E AAT=ATA=E。
若 A A A 为正交矩阵,则其满足以下性质:
- A A A 的转置矩阵 A T A^T AT 也是正交矩阵;
- A A A 的各行向量均为单位向量,且任意两个不同行向量正交;
- A A A 的各列向量均为单位向量,且任意两个不同列向量正交;
- 对任意向量 x , y ∈ R n x, y \in \mathbb{R}^n x,y∈Rn,均有内积关系 ( A x , A y ) = ( x , y ) (A x, A y) = (x, y) (Ax,Ay)=(x,y);
- 矩阵 A A A 的行列式值为 1 1 1 或 − 1 -1 −1,即 det ( A ) = ± 1 \det(A) = \pm 1 det(A)=±1;
- A A A 的转置矩阵等于 A A A 的逆矩阵,即 A T = A − 1 A^T = A^{-1} AT=A−1。
6. 正交变换
6.1 内积定义
对于欧式空间中的任意两个向量 u u u 和 v v v,其內积定义为:
( u , v ) = ∥ u ∥ ⋅ ∥ v ∥ ⋅ cos ⟨ u , v ⟩ (u, v) = \|u\| \cdot \|v\| \cdot \cos\langle u, v \rangle (u,v)=∥u∥⋅∥v∥⋅cos⟨u,v⟩
其中, ∥ u ∥ \|u\| ∥u∥、 ∥ v ∥ \|v\| ∥v∥ 分别表示向量 u u u、 v v v 的模长, ⟨ u , v ⟩ \langle u, v \rangle ⟨u,v⟩ 表示向量 u u u 与 v v v 的夹角。
6.2 正交变换的定义
在 linear algebra 中,正交变换是线性变换的一种特殊形式:设 V V V 为实内积空间,若线性变换 T : V → V T: V \to V T:V→V 满足对任意 u , v ∈ V u, v \in V u,v∈V,均有 ( T ( u ) , T ( v ) ) = ( u , v ) (T(u), T(v)) = (u, v) (T(u),T(v))=(u,v)(即变换前后向量的内积不变),则称 T T T 为 V V V 上的正交变换。
由于向量的模长( ∥ u ∥ = ( u , u ) \|u\| = \sqrt{(u, u)} ∥u∥=(u,u))与夹角( cos ⟨ u , v ⟩ = ( u , v ) ∥ u ∥ ⋅ ∥ v ∥ \cos\langle u, v \rangle = \frac{(u, v)}{\|u\| \cdot \|v\|} cos⟨u,v⟩=∥u∥⋅∥v∥(u,v))均由内积定义,因此正交变换具有核心特性——变换前后,向量的模长和向量间的夹角均保持不变。
特别地:标准正交基经过正交变换后,仍为标准正交基。
6.3 欧式空间中正交变换的类型
欧式空间 V V V 中的正交变换仅包含以下三类:
- 旋转变换;
- 反射变换;
- 旋转与反射的组合变换(又称瑕旋转)。
6.4 正交变换的性质
设 T T T 为欧式空间 V V V 上的正交变换, A , B A, B A,B 为正交矩阵,则 T T T 满足以下性质:
- 正交变换保持向量间的正交性:若 u , v ∈ V u, v \in V u,v∈V 且 ( u , v ) = 0 (u, v) = 0 (u,v)=0,则 ( T ( u ) , T ( v ) ) = 0 (T(u), T(v)) = 0 (T(u),T(v))=0;
- 正交矩阵的乘积仍为正交矩阵:若 A , B A, B A,B 均为正交矩阵,则 A B AB AB 也为正交矩阵;
- 正交矩阵的逆矩阵仍为正交矩阵:若 A A A 为正交矩阵,则 A − 1 A^{-1} A−1 也为正交矩阵;
- 正交变换的逆运算易于实现:由于 A T = A − 1 A^T = A^{-1} AT=A−1,正交变换的逆变换可通过矩阵转置直接计算;
- 内积不变性的推广:对任意 u , v ∈ V u, v \in V u,v∈V, ( T ( u ) , T ( v ) ) = ( u , v ) (T(u), T(v)) = (u, v) (T(u),T(v))=(u,v) 恒成立。
6.5 正交变换的示例与 Python 实现
设原矩阵 A A A、正交变换矩阵 T T T 分别为:
A = [ 1 2 3 4 5 6 7 8 9 ] , T = [ 2 0 0 0 3 0 0 0 4 ] A = \begin{bmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \end{bmatrix}, \quad T = \begin{bmatrix} 2 & 0 & 0 \\ 0 & 3 & 0 \\ 0 & 0 & 4 \end{bmatrix} A=
147258369
,T=
200030004
则矩阵 A A A 经过正交变换 T T T 后得到的矩阵 T A T A TA 为:
T A = [ 2 0 0 0 3 0 0 0 4 ] ⋅ [ 1 2 3 4 5 6 7 8 9 ] = [ 2 4 6 12 15 18 28 32 36 ] T A = \begin{bmatrix} 2 & 0 & 0 \\ 0 & 3 & 0 \\ 0 & 0 & 4 \end{bmatrix} \cdot \begin{bmatrix} 1 & 2 & 3 \\ 4 & 5 & 6 \\ 7 & 8 & 9 \end{bmatrix} = \begin{bmatrix} 2 & 4 & 6 \\ 12 & 15 & 18 \\ 28 & 32 & 36 \end{bmatrix} TA=
200030004
⋅
147258369
=
212284153261836
Python 代码实现(基于 NumPy 库)
通过代码可直接定义原矩阵 A A A 和变换矩阵 T T T,并计算变换后的矩阵 T A T A TA,代码如下:
import numpy as np
# 定义原矩阵 A
A = np.array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
# 定义正交变换矩阵 T
T = np.array([[2, 0, 0],
[0, 3, 0],
[0, 0, 4]])
# 计算 A 经过 T 变换后的矩阵 TA(矩阵乘法)
TA = np.dot(T, A)
# 输出结果
print("原矩阵 A:")
print(A)
print("\n正交变换矩阵 T:")
print(T)
print("\nA 经过 T 变换后的矩阵 TA:")
print(TA)
代码运行结果
原矩阵 A:
[[1 2 3]
[4 5 6]
[7 8 9]]
正交变换矩阵 T:
[[2 0 0]
[0 3 0]
[0 0 4]]
A 经过 T 变换后的矩阵 TA:
[[ 2 4 6]
[12 15 18]
[28 32 36]]
变换过程解读
由于变换矩阵 T T T 是对角矩阵(仅主对角线有非零元素),该乘法等价于对 A A A 的每行进行缩放:
主对角线元素 2 2 2:第 1 行所有元素 × 2
将 A A A 的第一行向量 ( 1 , 2 , 3 ) (1, 2, 3) (1,2,3) 沿原方向 “拉伸” 2 倍,得到 ( 2 , 4 , 6 ) (2, 4, 6) (2,4,6);
主对角线元素 3 3 3:第 2 行所有元素 × 3
将 A A A 的第二行向量 ( 4 , 5 , 6 ) (4, 5, 6) (4,5,6) 沿原方向 “拉伸” 3 倍,得到 ( 12 , 15 , 18 ) (12, 15, 18) (12,15,18);
主对角线元素 4 4 4:第 3 行所有元素 × 4
将 A A A 的第三行向量 ( 7 , 8 , 9 ) (7, 8, 9) (7,8,9) 沿原方向 “拉伸” 4 倍,得到 ( 28 , 32 , 36 ) (28, 32, 36) (28,32,36)。
若 T T T 主对角线上的元素为小于 1 的正数,则表示将 A A A 中对应行向量“缩小”一定比例;
若 T T T 主对角线以外的位置存在非零元素,则表示对 A A A 进行特定方向的旋转操作。
上述概念在图象处理中具有重要应用,例如 OpenCV 中的几何变换功能,其核心原理就是通过变换矩阵与原图像矩阵的乘积,得到目标图像矩阵。
线性代数:正交基和标准正交基
倪桦 已于 2024-11-23 15:25:13 修改
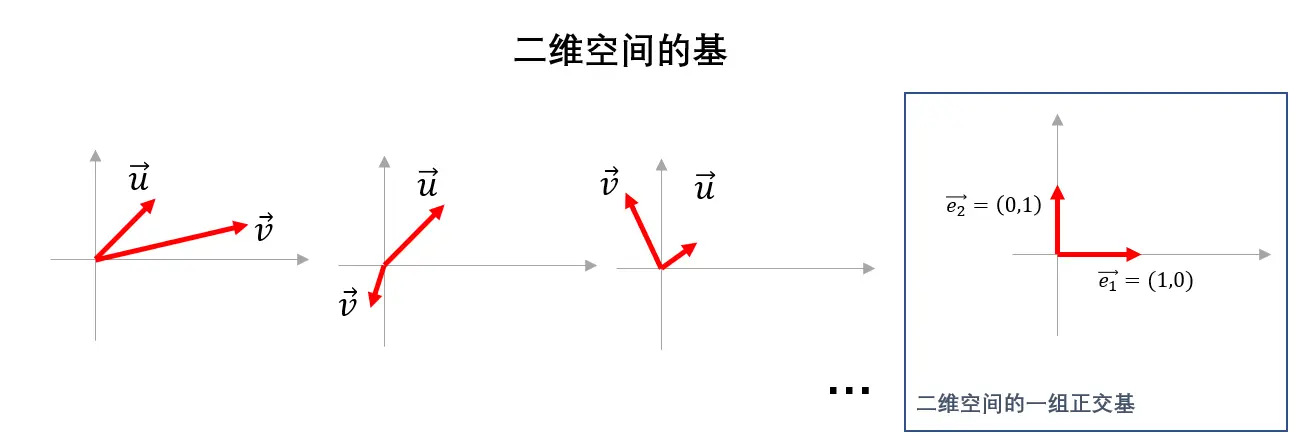
描述一个空间有两种方式,一种是通过维度,另一种是通过空间的基。空间的基是一组向量,这组向量的个数即为空间的维度。
在一个 n n n 维空间中,任意一组包含 n n n 个线性无关向量的集合,都是该 n n n 维空间的一组基。
一、二维空间的基示例
在二维空间中,最常见的基为单位向量组:
- e 1 = ( 1 , 0 ) e_1 = (1, 0) e1=(1,0)
- e 2 = ( 0 , 1 ) e_2 = (0, 1) e2=(0,1)
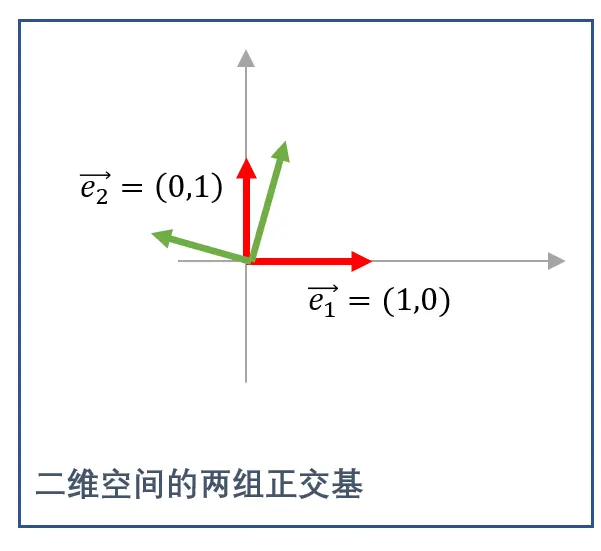
这组向量不仅是二维空间的基,也是后续将介绍的正交基与标准正交基。
二、正交的核心定义
为简化空间分析,我们通常优先选择互相垂直的向量组作为基,这类基称为正交基。
在数学研究中,为了便于描述空间中点的位置信息,通常会选择使用空间中一组互相垂直的向量构成的基,即 正交基 \color {red}{\small 正交基} 正交基。相较于非正交基,正交基在描述空间点的位置时更具优势,能够使计算过程更加简洁和直观。
要理解正交基,需先明确“正交”的数学定义:
1. 向量正交的定义
在欧几里得空间中,若两个向量互相垂直,则它们的点乘结果为 0 0 0。其数学表达式为:
u ⃗ ⋅ v ⃗ = u 1 ⋅ v 1 + u 2 ⋅ v 2 + ⋯ + u n ⋅ v n = ∥ u ⃗ ∥ ⋅ ∥ v ⃗ ∥ ⋅ cos θ \vec{u} \cdot \vec{v} = u_1 \cdot v_1 + u_2 \cdot v_2 + \cdots + u_n \cdot v_n = \|\vec{u}\| \cdot \|\vec{v}\| \cdot \cos\theta u⋅v=u1⋅v1+u2⋅v2+⋯+un⋅vn=∥u∥⋅∥v∥⋅cosθ
其中:
- ∥ u ⃗ ∥ \|\vec{u}\| ∥u∥、 ∥ v ⃗ ∥ \|\vec{v}\| ∥v∥ 分别表示向量 u ⃗ \vec{u} u、 v ⃗ \vec{v} v 的模(长度);
- θ \theta θ 表示两个向量的夹角。
当 θ = 90 ∘ \theta = 90^\circ θ=90∘ 时, cos θ = 0 \cos\theta = 0 cosθ=0,此时 u ⃗ ⋅ v ⃗ = 0 \vec{u} \cdot \vec{v} = 0 u⋅v=0。因此,线性代数中“正交”的定义为:若两个向量的点乘结果为 0 0 0,则称这两个向量正交(互相垂直)。
2. 正交向量组的定义
若一组向量中任意两个向量均满足正交关系(点乘为 0 0 0),则称该向量组为正交向量组。
3. 正交向量组的重要性质:非零正交向量组必线性无关
- 零向量的特殊性:零向量与任意向量的点乘结果均为 0 0 0,即零向量与任意向量正交。但包含零向量的向量组一定线性相关(根据线性相关定义,零向量前的系数可取任意非零值,使线性组合为 0 0 0)。
- 非零正交向量组的线性无关性证明:
设 v 1 ⃗ , v 2 ⃗ , … , v p ⃗ \vec{v_1}, \vec{v_2}, \dots, \vec{v_p} v1,v2,…,vp 为一组非零正交向量组,若存在系数 k 1 , k 2 , … , k p k_1, k_2, \dots, k_p k1,k2,…,kp 满足:
k 1 v 1 ⃗ + k 2 v 2 ⃗ + ⋯ + k p v p ⃗ = 0 k_1\vec{v_1} + k_2\vec{v_2} + \cdots + k_p\vec{v_p} = 0 k1v1+k2v2+⋯+kpvp=0
取向量组中的任意一个向量 v i ⃗ \vec{v_i} vi,将其与等式两边同时点乘:
( k 1 v 1 ⃗ + k 2 v 2 ⃗ + ⋯ + k p v p ⃗ ) ⋅ v i ⃗ = 0 ⋅ v i ⃗ = 0 (k_1\vec{v_1} + k_2\vec{v_2} + \cdots + k_p\vec{v_p}) \cdot \vec{v_i} = 0 \cdot \vec{v_i} = 0 (k1v1+k2v2+⋯+kpvp)⋅vi=0⋅vi=0
根据正交向量组的定义, v i ⃗ \vec{v_i} vi 与其他向量 v j ⃗ ( j ≠ i ) \vec{v_j} (j \neq i) vj(j=i) 正交,即 v j ⃗ ⋅ v i ⃗ = 0 \vec{v_j} \cdot \vec{v_i} = 0 vj⋅vi=0,因此展开后仅保留 v i ⃗ ⋅ v i ⃗ \vec{v_i} \cdot \vec{v_i} vi⋅vi 项:
k i ⋅ ( v i ⃗ ⋅ v i ⃗ ) = 0 k_i \cdot (\vec{v_i} \cdot \vec{v_i}) = 0 ki⋅(vi⋅vi)=0
由于 v i ⃗ \vec{v_i} vi 是非零向量,其模的平方 ∥ v i ⃗ ∥ 2 = v i ⃗ ⋅ v i ⃗ > 0 \|\vec{v_i}\|^2 = \vec{v_i} \cdot \vec{v_i} > 0 ∥vi∥2=vi⋅vi>0,因此 k i = 0 k_i = 0 ki=0。
对所有 i = 1 , 2 , … , p i = 1, 2, \dots, p i=1,2,…,p 重复上述过程,可得到所有系数 k 1 = k 2 = ⋯ = k p = 0 k_1 = k_2 = \cdots = k_p = 0 k1=k2=⋯=kp=0,即该向量组仅存在零解,故非零正交向量组线性无关。
三、正交基的定义与性质
1. 正交基的定义
若某空间的一组基满足“两两正交”的条件,则称这组基为该空间的正交基。
2. 正交基的核心性质
根据前文结论, n n n 维空间中任意 n n n 个线性无关的向量均可作为该空间的基;而 n n n 个非零正交向量组必线性无关,因此:
在 n n n 维空间中,任意 n n n 个非零正交向量构成的向量组,一定是该 n n n 维空间的正交基。
(注:正交基中无需额外强调“排除零向量”,因为基的定义本身要求向量组线性无关,而包含零向量的向量组线性相关,无法成为基。)
四、标准正交基的定义
1. 标准正交基的定义
若某空间的一组正交基满足“所有向量的模均为 1 1 1”的条件,则称这组基为该空间的标准正交基(也称为“规范正交基”)。
例如,二维空间中的向量组 { ( 1 , 0 ) , ( 0 , 1 ) } \{(1, 0), (0, 1)\} {(1,0),(0,1)} 就是一组标准正交基:
两两正交:
( 1 , 0 ) ⋅ ( 0 , 1 ) = 1 ⋅ 0 + 0 ⋅ 1 = 0 (1, 0) \cdot (0, 1) = 1 \cdot 0 + 0 \cdot 1 = 0 (1,0)⋅(0,1)=1⋅0+0⋅1=0;
每个向量的模为 1 1 1:
∥ ( 1 , 0 ) ∥ = 1 2 + 0 2 = 1 \|(1, 0)\| = \sqrt{1^2 + 0^2} = 1 ∥(1,0)∥=12+02=1,
∥ ( 0 , 1 ) ∥ = 0 2 + 1 2 = 1 \|(0, 1)\| = \sqrt{0^2 + 1^2} = 1 ∥(0,1)∥=02+12=1。
2. 标准正交基的多样性
一个空间的标准正交基并非唯一。例如,在二维空间中,向量组 { ( cos θ , sin θ ) , ( − sin θ , cos θ ) } \left\{\left(\cos\theta, \sin\theta\right), \left(-\sin\theta, \cos\theta\right)\right\} {(cosθ,sinθ),(−sinθ,cosθ)}(其中 θ \theta θ 为任意角度)也是一组标准正交基,只需验证:
- 两两正交: ( cos θ , sin θ ) ⋅ ( − sin θ , cos θ ) = − cos θ sin θ + sin θ cos θ = 0 \left(\cos\theta, \sin\theta\right) \cdot \left(-\sin\theta, \cos\theta\right) = -\cos\theta\sin\theta + \sin\theta\cos\theta = 0 (cosθ,sinθ)⋅(−sinθ,cosθ)=−cosθsinθ+sinθcosθ=0;
- 模为 1 1 1: ∥ ( cos θ , sin θ ) ∥ = cos 2 θ + sin 2 θ = 1 \left\|\left(\cos\theta, \sin\theta\right)\right\| = \sqrt{\cos^2\theta + \sin^2\theta} = 1 ∥(cosθ,sinθ)∥=cos2θ+sin2θ=1,同理另一向量的模也为 1 1 1。
因此,一个空间存在无数组标准正交基。
via:
【机器学习】【线性代数】正交基、标准正交基、正交矩阵,正交变换等数学知识点-CSDN博客
https://blog.csdn.net/u012421852/article/details/80475497线性代数:正交基和标准正交基-CSDN博客
https://blog.csdn.net/Nh_code/article/details/143992386