角点检测详解
1. 什么是角点?
在计算机视觉中,**角点(Corner)**指的是图像中灰度变化剧烈、具有显著方向性的特征点,通常位于两个边缘的交点处。
角点具有以下特性:
方向唯一性:从角点向任意方向移动,灰度都会明显变化。
稳定性好:在图像平移、旋转、尺度变化时仍能被检测到。
稀疏性强:角点数量远少于边缘或纹理区域,计算代价低。
常见的角点包括:
物体轮廓的拐角
窗口、门框等直角边缘
图案、棋盘格的交叉点
角点检测是许多计算机视觉任务的基础,例如:
图像配准(Image Registration)
相机标定(Camera Calibration)
运动跟踪(Object Tracking)
特征匹配(Feature Matching)
角点检测的作用非常广泛,它是计算机视觉和图像处理里的“基础积木”。简单来说,角点是图像中最容易识别和跟踪的点,因此很多高阶任务都会用到它。以下给你总结一下主要用途:
1. 特征匹配与图像拼接
角点可以用来表示图像的局部特征。
在两张图像中找到相同的角点后,可以实现特征匹配,进而估计它们的几何关系。
应用场景:
全景拼接:通过匹配不同照片中的角点来对齐、拼合图像。
三维重建:利用多张图片中同一点的角点匹配,推算出3D空间坐标。
2. 相机标定(Camera Calibration)
标定板上的黑白棋盘格角点非常适合角点检测,因为它们清晰且稳定。
检测到角点后,可求解相机的内外参,从而完成畸变矫正。
这是很多机器人、AR/VR 系统必做的步骤。
3. 目标跟踪(Object Tracking)
角点在视频帧之间的移动可以用来估计物体运动轨迹。
常用算法:Lucas-Kanade 光流法,就是在角点附近跟踪像素块。
应用场景:
行人、车辆跟踪
运动分析(体育、工业)
4. SLAM 和 AR 应用
SLAM(Simultaneous Localization and Mapping)依赖角点或特征点来识别场景中稳定的锚点。
AR 眼镜、ARKit 等用角点做特征跟踪,让虚拟物体“粘”在真实世界的表面。
5. 特征描述与识别
角点是提取局部特征描述子的天然选择(如 SIFT、ORB、BRISK)。
有助于:
目标识别
模式识别
图像检索
6. 机器人导航与路径规划
移动机器人或无人机利用角点检测识别环境特征,从而构建地图。
在无 GPS 环境下,也可以通过角点进行视觉里程计(Visual Odometry)。
✅ 总结一句话:
角点检测的作用就是帮计算机找到“独特且稳定的兴趣点”,方便后续做匹配、跟踪、定位、识别等任务。
2. 角点检测的数学原理
设灰度图像为 I(x,y)I(x,y),考虑一个小窗口 WW 在图像上的平移 (u,v)(u,v),计算窗口内的灰度差平方和:

对 I(x+u,y+v)进行一阶泰勒展开:
![]()
代入后得:
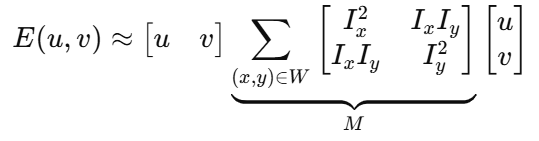
其中,矩阵 MM 称为结构张量(Second Moment Matrix),它反映了窗口内的梯度分布情况。
通过求 MM 的特征值 λ1,λ2\lambda_1,\lambda_2 可判断该区域特性:
平坦区域:λ1≈0,λ2≈0
边缘区域:一个特征值大,一个接近 0
角点区域:两个特征值都较大
3. 常用角点检测算法
3.1 Harris 角点检测
Harris 算法利用矩阵 MM 的行列式和迹构造响应函数:

其中:
det(M)=λ1λ2
trace(M)=λ1+λ2
k∈[0.04,0.06]为经验参数
当 R>0 且数值较大时,该点为角点。
优点:
计算效率高
稳定性好
缺点:对尺度不变性不敏感
3.2 Shi-Tomasi (Good Features to Track)
Shi-Tomasi 算法直接使用最小特征值判断角点:
R=min(λ1,λ2)
只要最小特征值大于阈值,就认为该点是角点。
这种方法比 Harris 更稳定,因为避免了参数 kk 带来的不确定性,常用于光流跟踪(如 Lucas-Kanade 光流)。
3.3 FAST 角点检测
FAST(Features from Accelerated Segment Test)是一种更快的角点检测算法:
以候选点为中心,取周围 16 个像素。
选定阈值 tt,比较这些像素与中心像素灰度差。
若有至少连续的 n 个像素亮度都大于中心 +t 或小于中心 -t,则判定为角点。
优点:速度快,适合实时应用
缺点:不如 Harris 稳定,容易受噪声干扰
4. OpenCV 实现示例
下面给出一个对比 Harris 和 Shi-Tomasi 的示例代码:
import cv2
import numpy as np
# 读取图像并转为灰度
img = cv2.imread('chessboard.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# ---------- Harris 角点 ----------
gray_f = np.float32(gray)
harris = cv2.cornerHarris(gray_f, blockSize=2, ksize=3, k=0.04)
harris = cv2.dilate(harris, None)
img_harris = img.copy()
img_harris[harris > 0.01 * harris.max()] = [0, 0, 255]
# ---------- Shi-Tomasi 角点 ----------
corners = cv2.goodFeaturesToTrack(gray, maxCorners=100, qualityLevel=0.01, minDistance=10)
img_shi = img.copy()
for corner in corners:
x, y = corner.ravel()
cv2.circle(img_shi, (int(x), int(y)), 3, (0, 255, 0), -1)
cv2.imshow('Harris Corners', img_harris)
cv2.imshow('Shi-Tomasi Corners', img_shi)
cv2.waitKey(0)
cv2.destroyAllWindows()
代码解析:
cv2.cornerHarris:执行 Harris 角点检测blockSize: 窗口大小ksize: Sobel 算子大小k: Harris 响应参数
cv2.goodFeaturesToTrack:执行 Shi-Tomasi 算法maxCorners: 最大检测角点数qualityLevel: 阈值(相对于最大角点响应)minDistance: 角点间的最小距离
5. 结果对比
Harris 检测会产生较多响应点,可能需要后处理(非极大值抑制)。
Shi-Tomasi 输出点更稳定且更适合光流跟踪。
FAST 速度最快,但可能产生误检。
6. 总结
角点检测是特征提取的重要步骤,常用于目标跟踪、特征匹配和 3D 重建。
选用建议:
若追求稳定性 → Shi-Tomasi
若需要速度 → FAST
若进行特征描述 → 通常与 SIFT、ORB 等结合使用