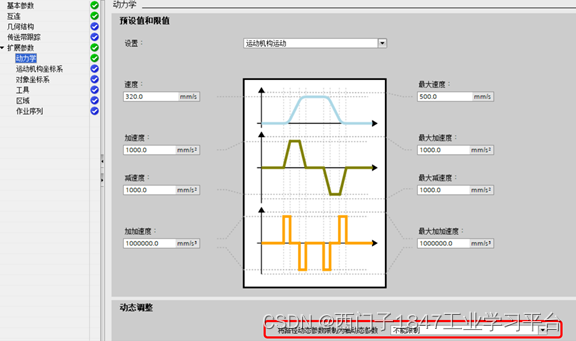
激活动态调整时,会为运动机构的运动计算速度曲线,其中考虑了运动机构运动的动态规范或动态预设和动态限值以及运动机构轴的最大速度、最大加速度和最大减速度。此外,还考虑了定向运动的速度、加速度和减速度的动态预设和动态限值。
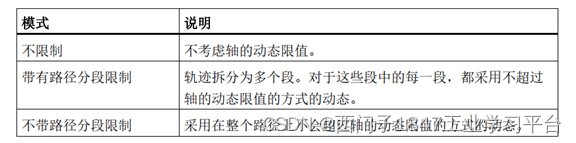
动态调整可设置为以下三种模式:
另外,我们知道,运动机构有另一个重要概念“Buffer Mode”,那么当动态调整结合“Buffer Mode”使用时,两者的各种模式搭配,会产生怎样的结果呢?
下面我们通过试验对动态限值中的最大速度设定值来进行验证。
试验设定
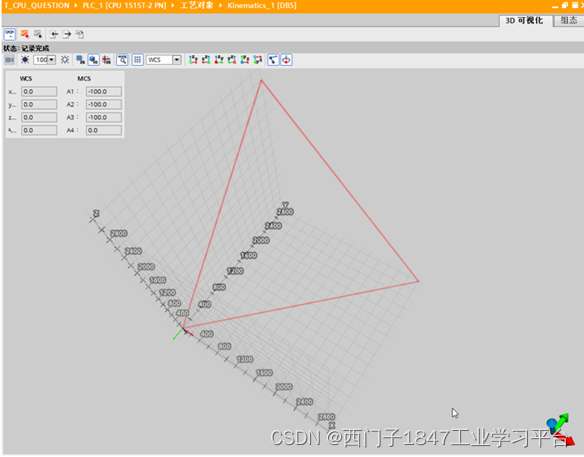
定义三个定位轴 1, 2, 3 和一个kinematic笛卡尔3D运动机构。将轴 1, 2, 3 分别关联到运动机构的 X, Y, Z 轴。
在轴的组态中,将轴 1 的最大速度组态为 180 mm/s,将轴 2 的最大速度组态为 120 mm/s,将轴 3 的最大速度组态为 300 mm/s。三个轴组态的电机转速都是 3000 rpm,螺距为 10 mm。
组态完成后,执行三条MC_MoveLinearAbsolute指令,将刀具在WCS坐标系下从初始位置(0, 0, 0)依次移动到点(3000, 3000, 0), (0, 3000, 3000),(0, 0, 0)。如下图中三角形所示。刀具的路径速度设定为 320 mm/s。
试验 1
Buffermode = 1 (附加运动) , DynamicAdaption = 0(不限制)
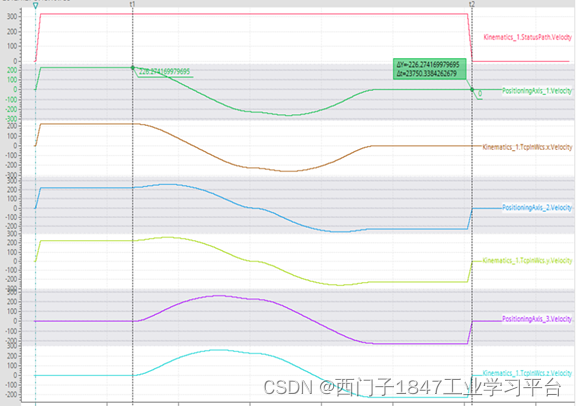
测试的TRACE曲线如下图所示:
从图中可以看到,X轴和Y轴的速度给定值已经超过了在单轴中组态的最大速度,两个轴在运行中的最大速度都是 226 mm/s。(X轴最大速度 180 mm/s, Y轴最大速度 120 mm/s)。刀具的路径速度为 320 mm/s,达到了设定值。
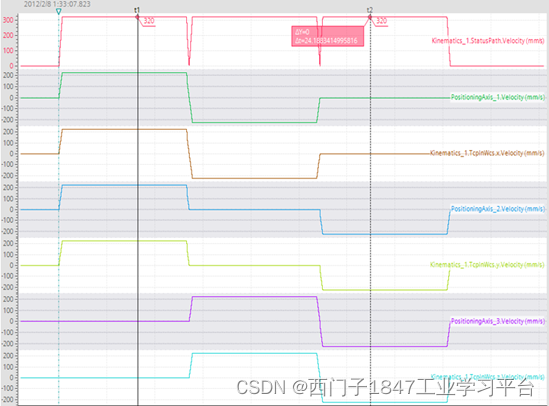
结论
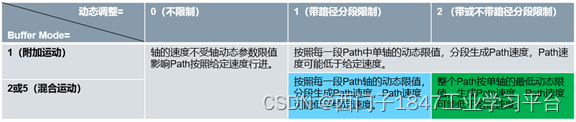
Buffermode = 1 , DynamicAdaption = 0 时,轴的速度不受轴动态参数限值影响,Path按照给定速度行进。
试验 2
Buffermode = 2 或 5(混合运动), DynamicAdaption = 0(不限制)
测试的TRACE曲线如下图所示:
从图中可以看到,X轴和Y轴的速度给定值已经超过了在单轴中组态的最大速度,两个轴在运行中的最大速度都是 226 mm/s。(X轴最大速度 180 mm/s, Y轴最大速度 120 mm/s)。刀具的路径速度为 320 mm/s,达到了设定值。
结论
Buffermode = 2 或 5,DynamicAdaption = 0 时,轴的速度不受轴动态参数限值影响,Path按照给定速度行进。
试验 3
Buffermode = 1(附加运动),DynamicAdaption = 1 或 2(带或不带路径分段限制)
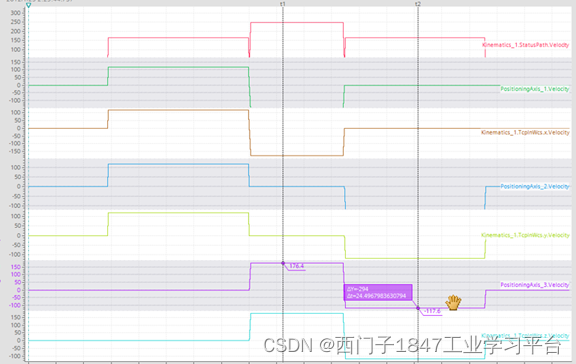
测试的TRACE曲线如下图所示:
从图中可以看到,在第一段路径中,刀具在XY平面上移动,X轴和Y轴在运行中的速度都是 117.6 mm/s,小于Y轴组态的最大速度;在第二段路径中,刀具在XZ平面上移动,X轴和Z轴在运行中的速度都是 176.4 mm/s,小于X轴组态的最大速度;在第三段路径中,刀具在YZ平面中移动,Y轴和Z轴在运行中的速度都是 117.6 mm/s,小于Y轴组态的最大速度。(X轴最大速度 180 mm/s, Y轴最大速度 120 mm/s)。刀具的路径速度达不到设定值。
试验 4
Buffermode = 2 或 5(混合运动),DynamicAdaption = 1(带路径分段限制)
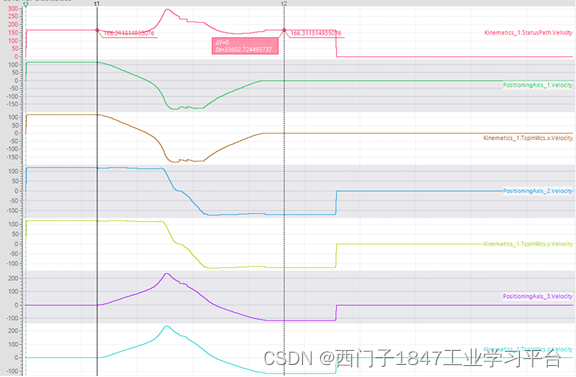
测试的TRACE曲线如下图所示:
从图中可以看到,在第一段路径中,刀具在XY平面上移动,X轴和Y轴的速度都小于Y轴组态的最大速度 120 mm/s;在第二段路径中,刀具在XZ平面上移动,X轴和Z轴在运行中的速度都小于X轴组态的最大速度 180/s;在第三段路径中,刀具在YZ平面中移动,Y轴和Z轴在运行中的速度都小于Y轴组态的最大速度 120 mm/s。刀具的路径速度达不到设定值。
结论
Buffermode = 2 或 5,DynamicAdaption = 1 时,按照每一段Path轴的动态限值,分段生成Path速度,Path速度可能低于给定速度。
试验 5
Buffermode = 2 或 5(混合运动),DynamicAdaption = 2(不带路径分段限制)
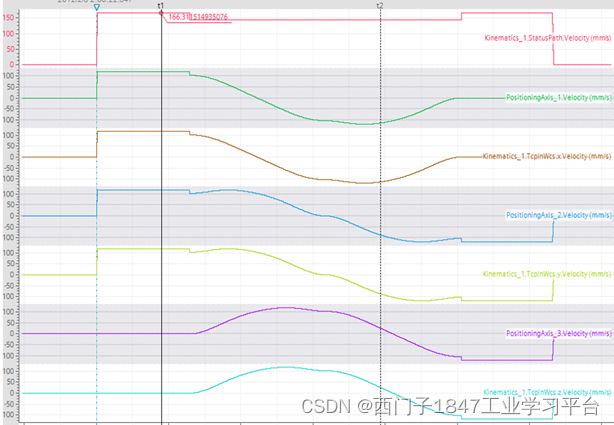
测试的TRACE曲线如下图所示:
从图中可以看到,在整个路径中, XYZ三个轴的速度都小于Y轴组态的最大速度 120 mm/s。刀具的路径速度达不到设定值。
结论
Buffermode = 2 或 5,DynamicAdaption = 1 时,整个Path按单轴的最低动态限值,生成Path速度,Path速度可能低于给定速度。
测试结果
如下表所示,Buffer Mode = 1, DynamicAdaption = 1 或 2 时,单轴的速度动态限值,按照路径分段起限制作用;Buffer Mode = 2 或 5 时,单轴的速度动态限值是否起作用,完全由动态调整决定。
想要学习更多工业知识,欢迎访问西门子1847工业学习平台,这是一个官方的学习平台,能够帮助您高效获得实用和权威的资料。