前言
大家好,我是阿光。
本专栏整理了《图神经网络》,内包含了不同图神经网络的原理以及相关代码实现,详细讲解图神经网络,理论与实践相结合,如GCN、GraphSAGE、GAT等经典图网络,每一个代码实例都附带有完整的代码+数据集。
正在更新中~ ✨
🚨 我的项目环境:
- 平台:Windows10
- 语言环境:python3.7
- 编译器:PyCharm
- PyTorch版本:1.11.0
- PyG版本:2.1.0
💥 项目专栏:【入门图神经网络】
本文我们将使用Pytorch + Pytorch Geometric来简易实现一个GAT(图注意力网络),让新手可以理解如何PyG来搭建一个简易的图网络实例demo。
一、导入相关库
本项目我们需要结合两个库,一个是Pytorch,因为还需要按照torch的网络搭建模型进行书写,第二个是PyG,因为在torch中并没有关于图网络层的定义,所以需要torch_geometric这个库来定义一些图层。
import torch
import torch.nn.functional as F
import torch.nn as nn
import torch_geometric.nn as pyg_nn
from torch_geometric.datasets import Planetoid
二、加载Cora数据集
本文使用的数据集是比较经典的Cora数据集,它是一个根据科学论文之间相互引用关系而构建的Graph数据集合,论文分为7类,共2708篇。
- Genetic_Algorithms
- Neural_Networks
- Probabilistic_Methods
- Reinforcement_Learning
- Rule_Learning
- Theory
这个数据集是一个用于图节点分类的任务,数据集中只有一张图,这张图中含有2708个节点,10556条边,每个节点的特征维度为1433。
# 1.加载Cora数据集
dataset = Planetoid(root='./data/Cora', name='Cora')
三、定义GCN网络
这里我们就不重点介绍GCN网络了,相信大家能够掌握基本原理,本文我们使用的是PyG定义网络层,在PyG中已经定义好了GCNConv这个层,该层采用的就是GCN机制。
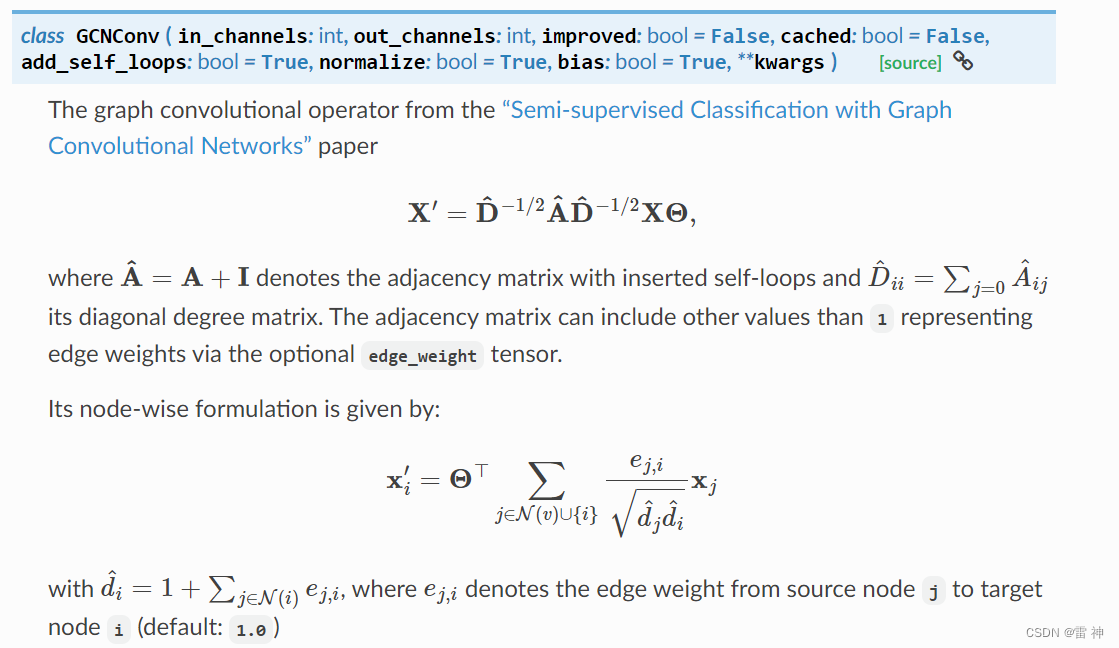
对于GCNConv的常用参数:
- in_channels:每个样本的输入维度,就是每个节点的特征维度
- out_channels:经过注意力机制后映射成的新的维度,就是经过GAT后每个节点的维度长度
- normalize:是否添加自环,并且是否归一化,默认为True
- add_self_loops:为图添加自环,是否考虑自身节点的信息
- bias:训练一个偏置b
# 2.定义GCNConv网络
class Net(nn.Module):
def __init__(self, num_node_features, num_classes):
super(Net, self).__init__()
self.conv1 = pyg_nn.GCNConv(num_node_features, 16)
self.conv2 = pyg_nn.GCNConv(16, num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
上面网络我们定义了两个GCNConv层,第一层的参数的输入维度就是初始每个节点的特征维度,输出维度是16。
第二个层的输入维度为16,输出维度为分类个数,因为我们需要对每个节点进行分类,最终加上softmax操作。
四、定义模型
下面就是定义了一些模型需要的参数,像学习率、迭代次数这些超参数,然后是模型的定义以及优化器及损失函数的定义,和pytorch定义网络是一样的。
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') # 设备
epochs = 10 # 学习轮数
lr = 0.003 # 学习率
num_node_features = dataset.num_node_features # 每个节点的特征数
num_classes = dataset.num_classes # 每个节点的类别数
data = dataset[0].to(device) # Cora的一张图
# 3.定义模型
model = Net(num_node_features, num_classes).to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=lr) # 优化器
loss_function = nn.NLLLoss() # 损失函数
五、模型训练
模型训练部分也是和pytorch定义网络一样,因为都是需要经过前向传播、反向传播这些过程,对于损失、精度这些指标可以自己添加。
# 训练模式
model.train()
for epoch in range(epochs):
optimizer.zero_grad()
out = model(data)
loss = loss_function(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
print("【EPOCH: 】%s" % str(epoch + 1))
print("训练损失为%s" % (str(loss.item())))
print('【Finished Training!】')
六、模型验证
下面就是模型验证阶段,在训练时我们是只使用了训练集,测试的时候我们使用的是测试集,注意这和传统网络测试不太一样,在图像分类一些经典任务中,我们是把数据集分成了两份,分别是训练集、测试集,但是在Cora这个数据集中并没有这样,它区分训练集还是测试集使用的是掩码机制,就是定义了一个和节点长度相同纬度的数组,该数组的每个位置为True或者False,标记着是否使用该节点的数据进行训练。
# 模型验证
model.eval()
pred = model(data)
# 训练集(使用了掩码)
correct_count_train = pred.argmax(axis=1)[data.train_mask].eq(data.y[data.train_mask]).sum().item()
acc_train = correct_count_train / data.train_mask.sum().item()
# 测试集
correct_count_test = pred.argmax(axis=1)[data.test_mask].eq(data.y[data.test_mask]).sum().item()
acc_test = correct_count_test / data.test_mask.sum().item()
print('Train Accuracy: {:.4f}'.format(acc_train))
print('Test Accuracy: {:.4f}'.format(acc_test))
七、结果
【EPOCH: 】1
训练损失为1.9580566883087158
【EPOCH: 】21
训练损失为1.0605995655059814
【EPOCH: 】41
训练损失为0.477316677570343
【EPOCH: 】61
训练损失为0.27266010642051697
【EPOCH: 】81
训练损失为0.145067036151886
【EPOCH: 】101
训练损失为0.09675390273332596
【EPOCH: 】121
训练损失为0.0813504308462143
【EPOCH: 】141
训练损失为0.07555271685123444
【EPOCH: 】161
训练损失为0.05960465967655182
【EPOCH: 】181
训练损失为0.04603490233421326
【Finished Training!】
