✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
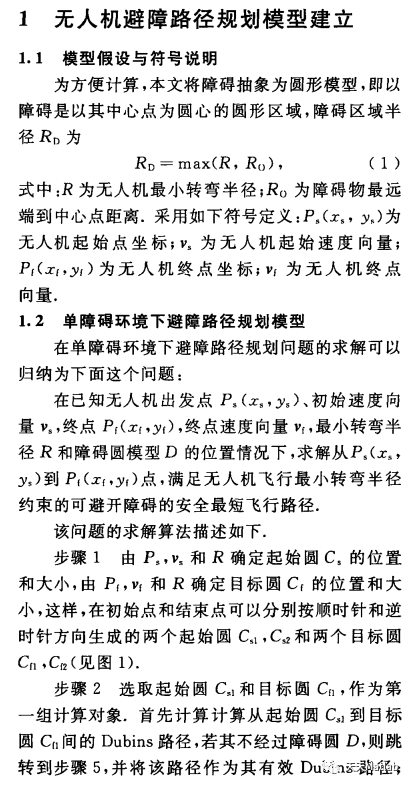
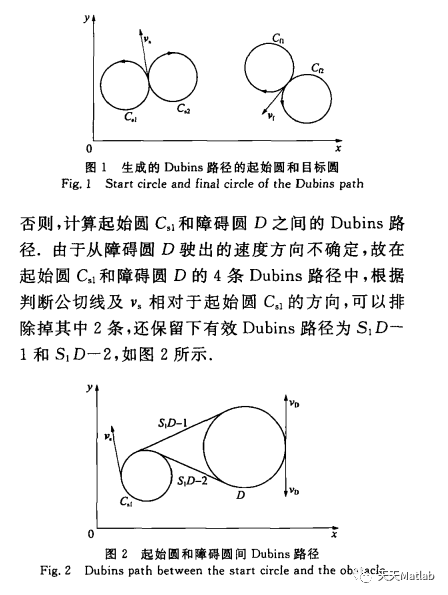
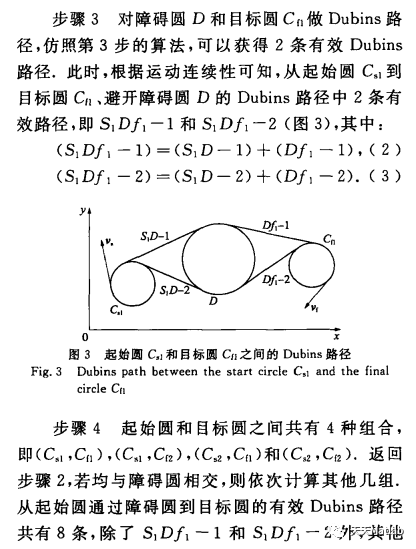
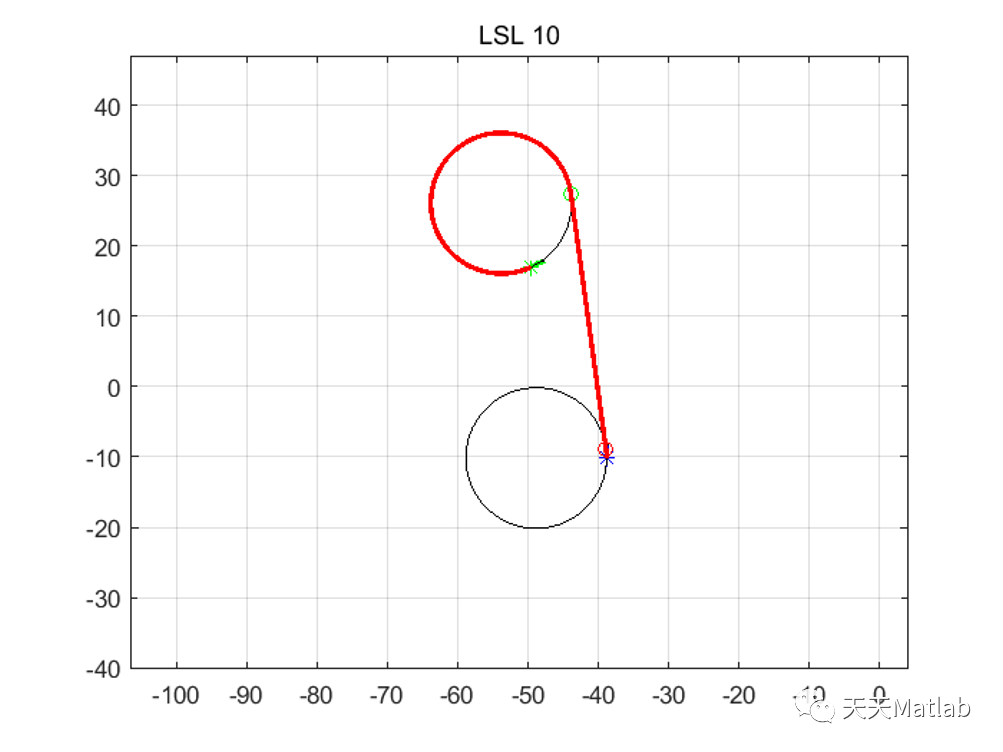
研究了一种基于Dubins路径的无人机的避障规划算法.
⛄ 部分代码
clc
clear all
%%
%输入参数
start.curvature = 1 / 10;
finish.curvature = 1 / 10;
start.x = -38.8358;
start.y = -10.16;
start.direction_speed = pi / 2;
finish.x = -49.4946;
finish.y = 17.0344;
finish.direction_speed = 0.4457;
%%
%得到最短路径
[start_all,finish_all,min_dubins_length,index,dubins_length] = dubins_trajectory(start,finish);
dubins_types(start_all,finish_all,index);
⛄ 运行结果
⛄ 参考文献
[1]赵冬梅. 无人机航路规划技术研究[D]. 电子科技大学, 2012.
[2]关震宇, 杨东晓, 李杰,等. 基于Dubins路径的无人机避障规划算法[J]. 北京理工大学学报, 2014, 34(6):6.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除
本文含有隐藏内容,请 开通VIP 后查看