一、TurtleBot3 简介
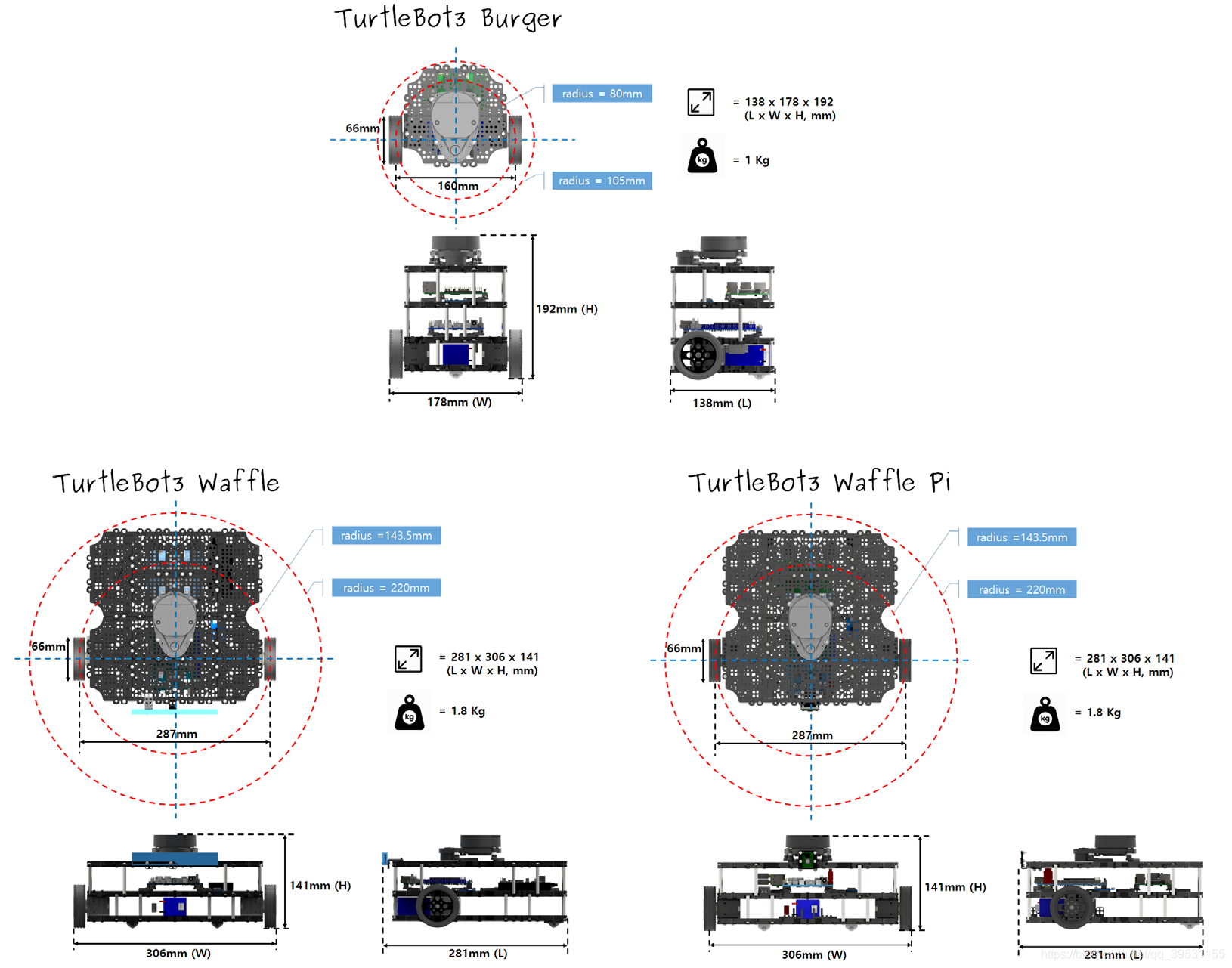
TurtleBot3 是一个小型,低成本,完全可编程,基于 ROS 的移动机器人。它旨在用于教育,研究,产品原型和爱好应用的目的。TurtleBot3 的目标是大幅降低平台的尺寸和价格,而不会牺牲性能,功能和质量。由于提供了其他选项,如底盘,计算机和传感器,TurtleBot3 可以通过各种方式进行定制。TurtleBot3 应用 了SBC(单板计算机),深度传感器和 3D 打印的最新技术进步等技术。
二、安装 TurtleBot3 仿真
1.安装依赖
sudo apt-get install ros-melodic-joy ros-melodic-teleop-twist-joy ros-melodic-teleop-twist-keyboard ros-melodic-laser-proc ros-melodic-rgbd-launch ros-melodic-depthimage-to-laserscan ros-melodic-rosserial-arduino ros-melodic-rosserial-python ros-melodic-rosserial-server ros-melodic-rosserial-client ros-melodic-rosserial-msgs ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-urdf ros-melodic-xacro ros-melodic-compressed-image-transport ros-melodic-rqt-image-view ros-melodic-gmapping ros-melodic-navigation ros-melodic-interactive-markers rviz2.下载资源包
mkdir -p ~/turtlebot3_ws/src/
cd ~/turtlebot3_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git三个GitHub链接会出现下着下着就不动的情况,直接Ctrl+c取消掉,然后再次下载,不用担心,已经下载的不会再重复下载,也就是会接着上一次的继续下载。或者下载这里的链接,然后解压到turtlebot3_ws中即可,步骤:
先把下载的资源包放在turtlebot3_ws下,然后在当前目录下打开终端,运行解压命令:
tar -zxvf src.tgz3.编译
cd ~/turtlebot3_ws
catkin_make三、启动 TurtleBot3 仿真
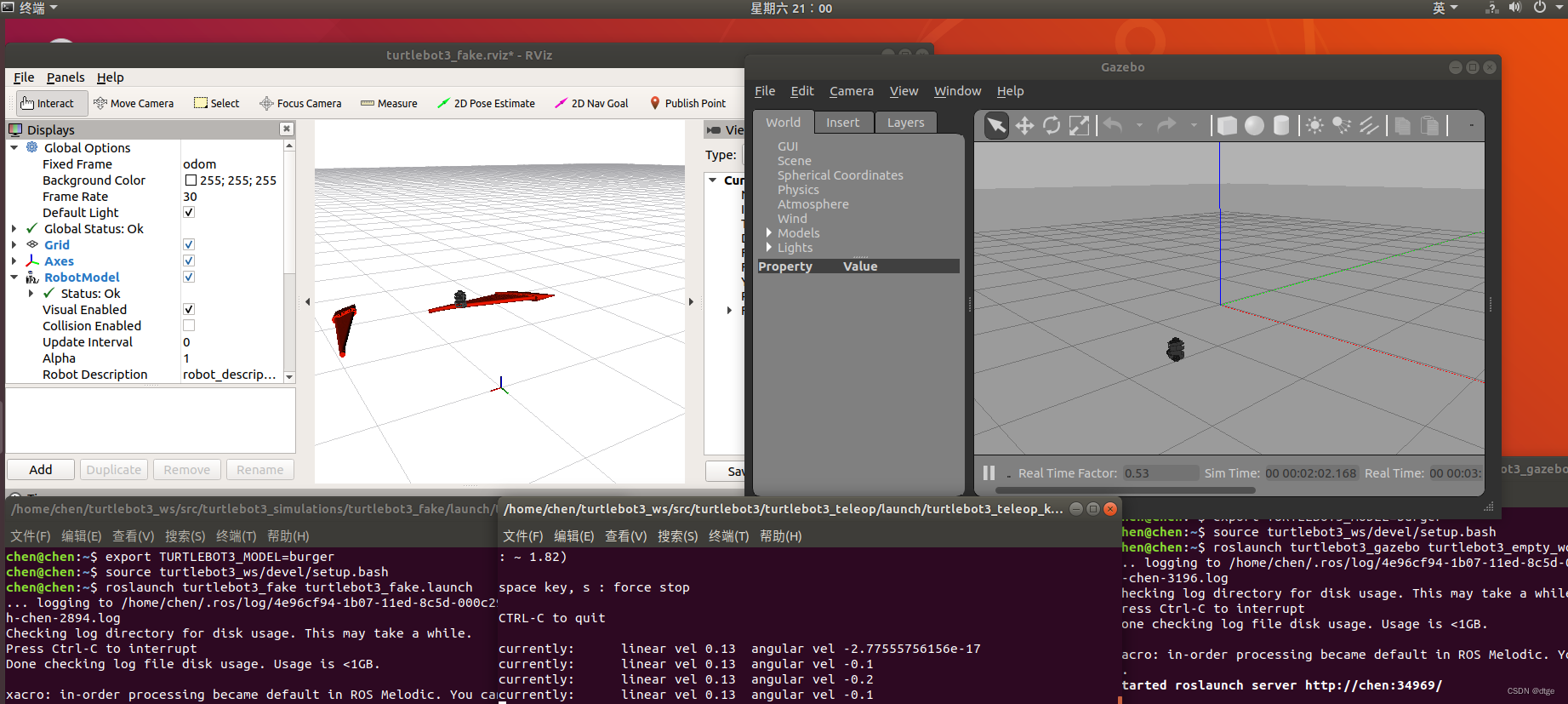
1.先将 TurtleBot3 导入,再启动仿真环境(rviz)
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_fake turtlebot3_fake.launch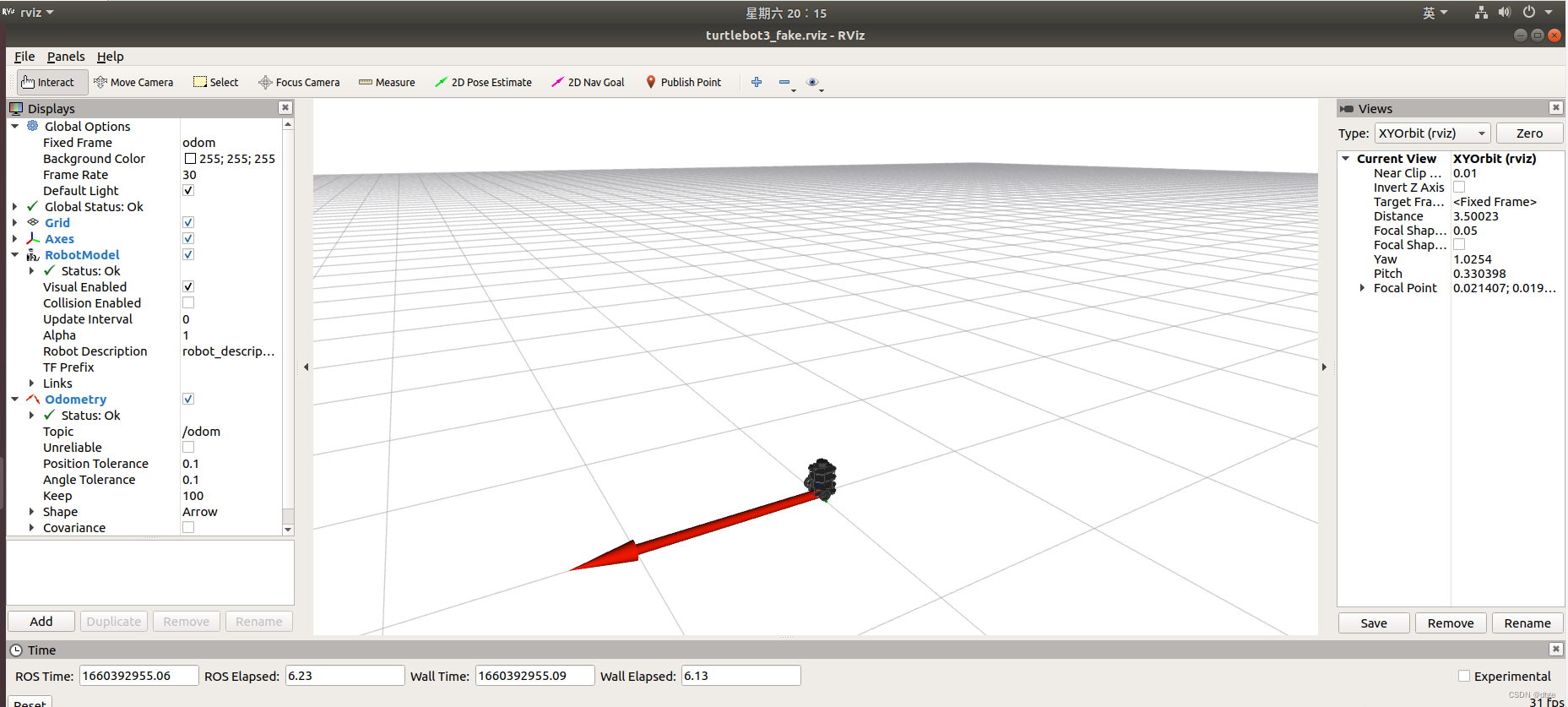
2.控制TurtleBot3移动
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch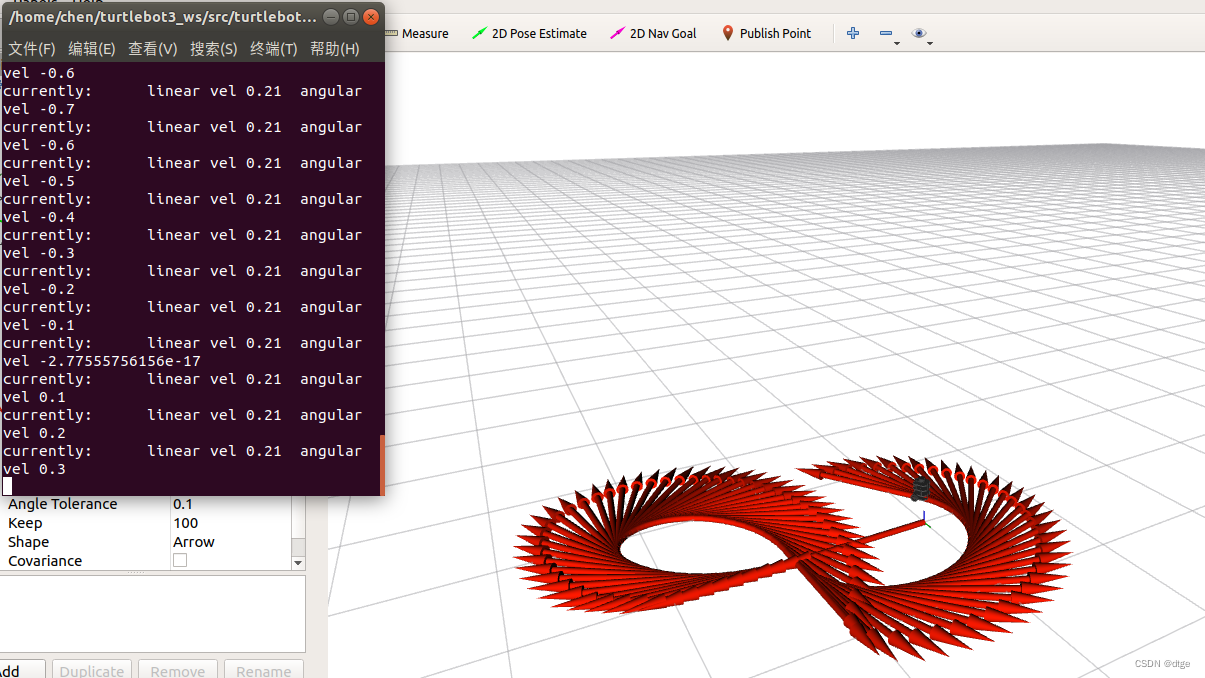
3.加载模型(gazebo )
第一次使用 gazebo 需要比较长的时间加载模型,也可以手动加载模型,第一次使用 Turtlebot3 的 gazebo 仿真,需要把 Turtlebot3 的模型文件,复制到 gazebo 的模型目录里。
mkdir -p ~/.gazebo/models/
cp -r ~/turtlebot3_simulations路径/turtlebot3_simulations/turtlebot3_gazebo/worlds ~/.gazebo/models/例如我的
mkdir -p ~/.gazebo/models/
cp -r ~/turtlebot3_ws/scr/turtlebot3_simulations/turtlebot3_gazebo/worlds ~/.gazebo/models/4.设置模型参数
设置模型参数,指定使用那种机器人型号: burger 或者 waffle
export TURTLEBOT3_MODEL=burger5.启动世界地图
启动世界地图,默认的空白地图环境中加载 Turtlebot3 机器人
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch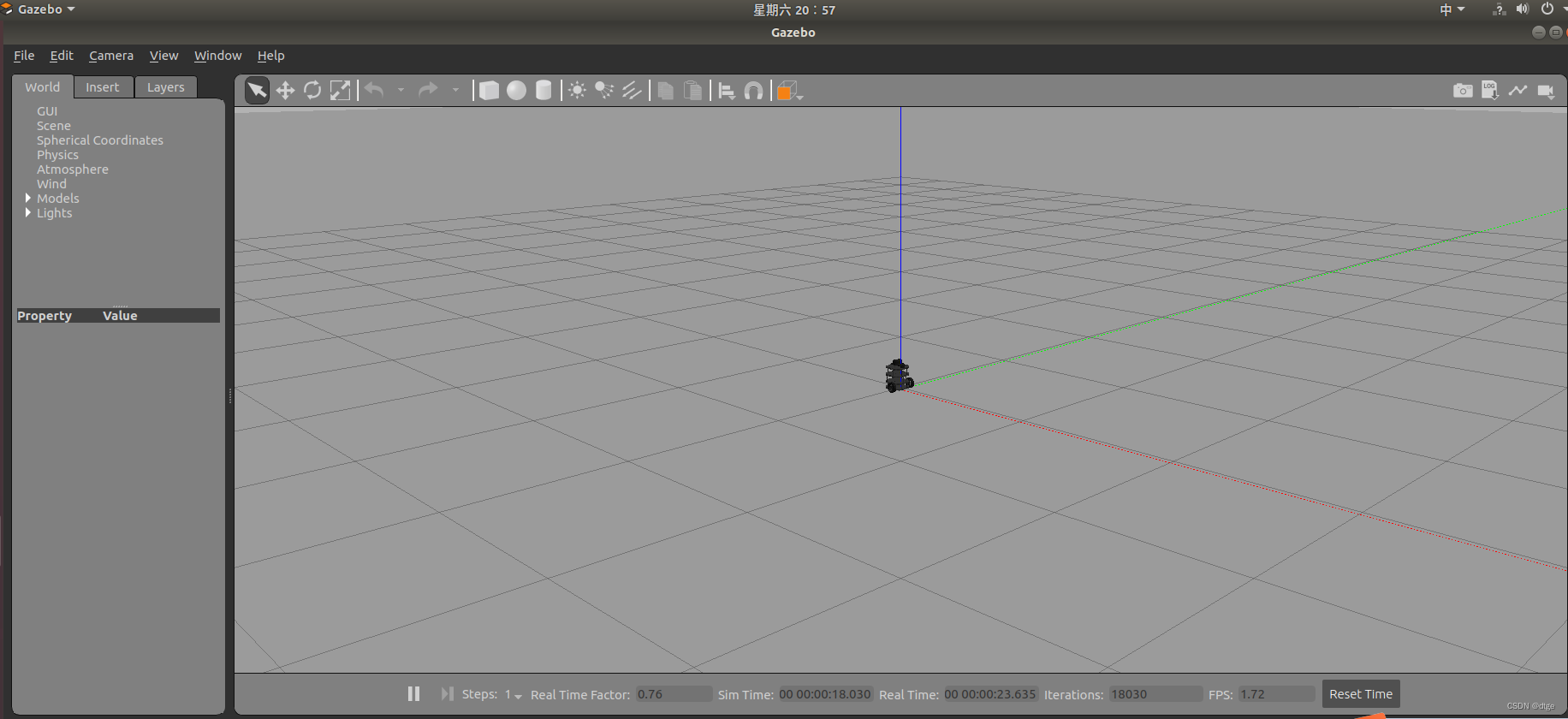
四、TurtleBot3 仿真: 复杂地图
1. (1)启动更复杂些的地图
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launch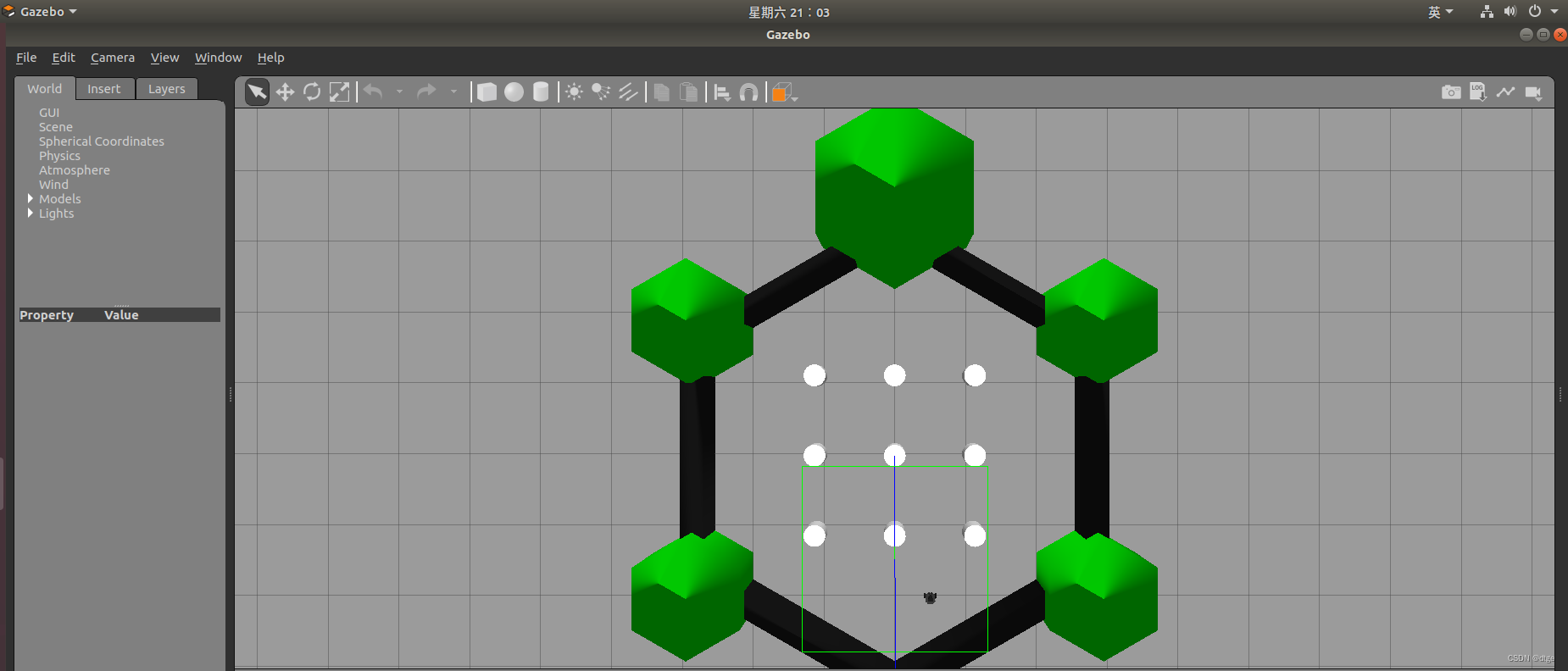
1.(2)或者房间地图
export TURTLEBOT3_MODEL=burger
source turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_gazebo turtlebot3_house.launch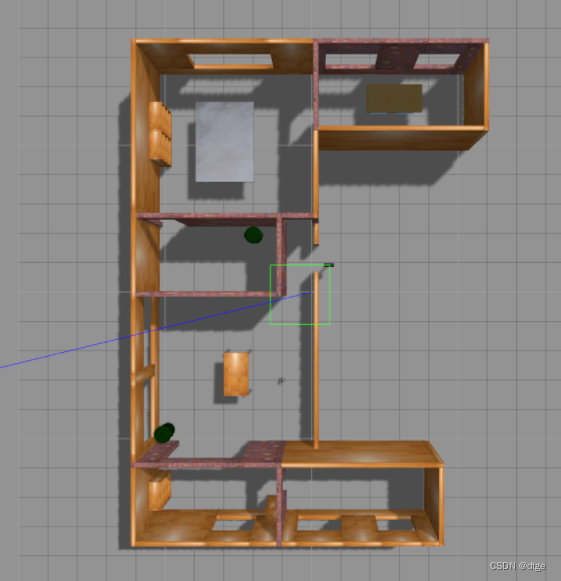
2.用键盘控制 turtlebot3
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch3. 启动仿真
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
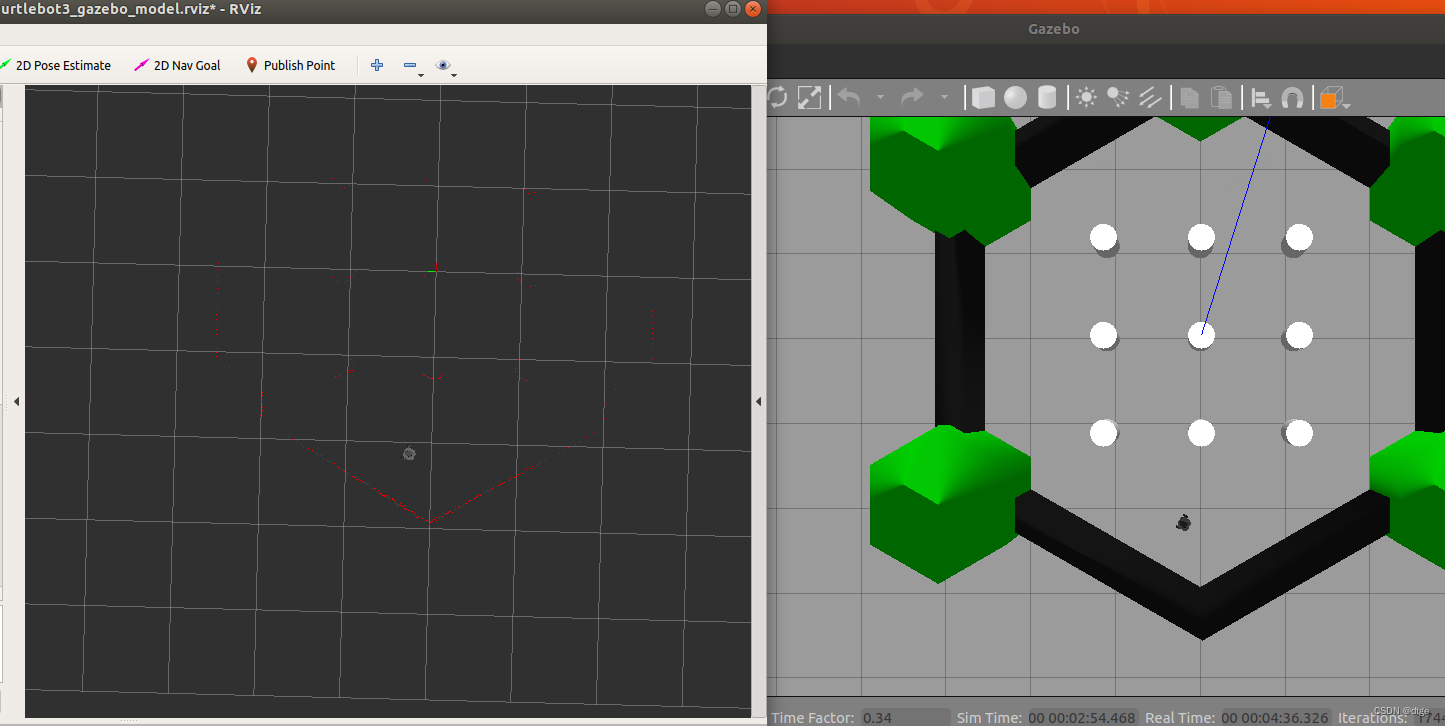
roslaunch turtlebot3_gazebo turtlebot3_simulation.launch4. 启动 RVIZ 可视化
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_gazebo turtlebot3_gazebo_rviz.launch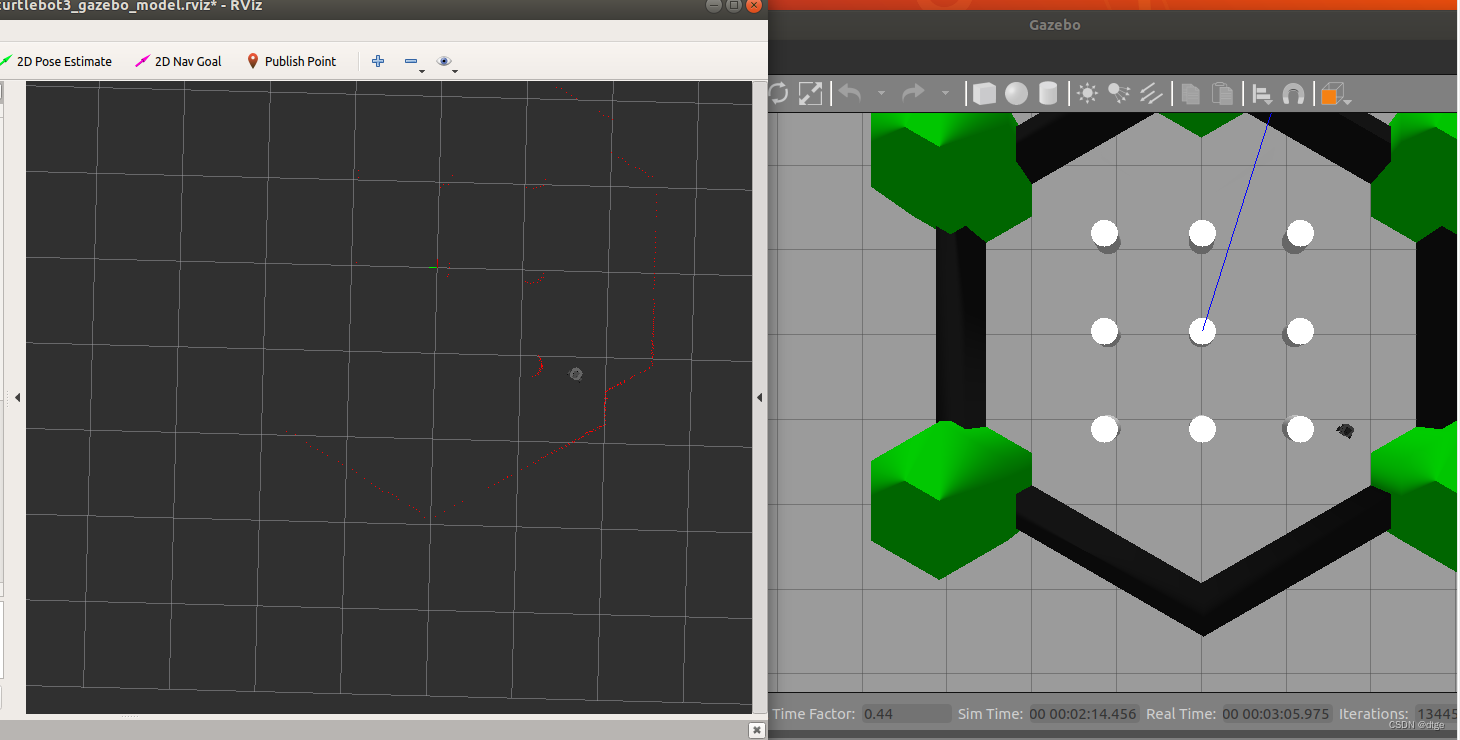
五、TurtleBot3:SLAM建图+导航仿真
1. 安装 turtlebot3 相关的 ROS 包
sudo apt-get install ros-melodic-turtlebot*2. 目前激光 SLAM 的建图方法有很多中,turtlebot3 支持 gmapping、cartographer、hector、 karto、frontier_exploration,ROS Melodic 版本官方的软件源里只有 karto。用户可以根据 需要安装。
sudo apt-get install ros-melodic-slam-karto3. 建图
(1)每个新终端都要设置环境变量,也可以是burger,waffle,waffle_pi
export TURTLEBOT3_MODEL=burger (2)加载环境,也可选择其他环境,或自己搭环境
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launch(3) 建图时要切换到这个终端,用键盘控制turtlebot运动
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch(4)创建栅格地图
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=karto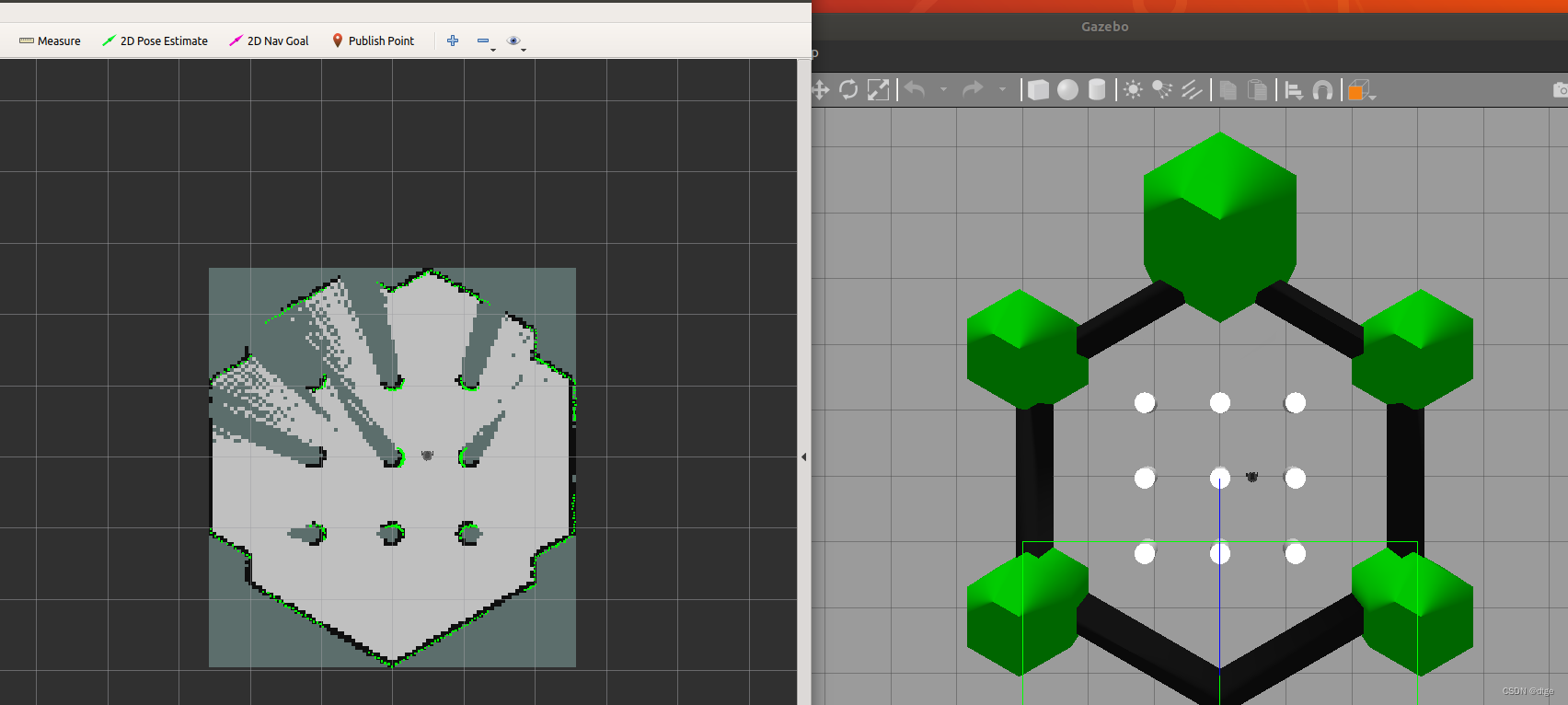
4. 保存地图:地图建完以后将地图保存下来:
mkdir -p ~/housemap
rosrun map_server map_saver -f ~/housemap/housemap5. 导航。利用刚才构建的地图进行 turtlebot 的自主导航仿真实验:
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_house.launchexport TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_navigation turtlebot3_navigation.launch
map_file:=/home/zhang/housemap/housemap.yaml鼠标选择工具栏中的“2D Nav Goal”,在地图上任意设置一个目标,turtlebot3会自动规划路径移动到目标位置。
一键安装ROS推荐:
鱼香ROS,看他这里面说的挺厉害的,但是本人是在弄好这篇文章之后才发现的,还没有尝试,期待管用,这里先放上,留着以后备用。