前言
机器人感知决策是机器人移动的前提,机器人需要对周围环境实现理解,而周围环境通常由静态环境与动态环境构成。机器人在初始状态或者重启时需要确定当前所处的位置,然后根据用户的指令或意图,开展相应移动或抓取操作。通过视觉感知确定机器人所处位置,同时如何根据感知结果确定移动方向是重要的研究方向。视觉位置识别(VPR)主要是从标记的图像数据库中搜索最佳匹配,来粗略估计查询地点图像的位置,可以归结为数据库构建与查询的过程。主要的问题是环境中有部分是动态环境,因此很多算法均是在固定场景进行实验,缺乏泛化性,如何根据环境实现机器人导航也面临着挑战。
方法
视觉位置识别
1、AnyLoc: Towards Universal Visual Place Recognition
AnyLoc旨在位置识别算法的通用性,包括任何地点(无缝地运行在任何环境中,包括空中、地下和水下),任何时间(对场景中的时间变化,如昼夜或季节变化,或对临时物体具有鲁棒性),以及跨任何视角(对视角变化具有鲁棒性,包括完全相反的视角。主要通过聚合从大规模预训练模型(基础模型)提取的每像素特征来实现这一目标,而无需进行任何训练或微调。
主要采用自监督特征(如DINOv2)和无监督聚合方法(如VLAD和GeM),用来提取每个像素特征,相较于直接使用现成模型的每个图像特征,可以获得显著的性能提升。通过评估局部特征对应的鲁棒性来说明这种密集ViT特征在VPR中的适用性。选择数据库图像上的一个点,将其与查询图像中的所有(每个像素)特征进行匹配,并绘制热图来指示这些点对应的可能性。请注意,即使存在语义文本和尺度变化(第一行),感知混淆和视角变化(第二行),以及低照明和相反视角(第三行),这些对应关系仍然是鲁棒的。

另外对聚合的局部特征进行语义属性的表征,揭示潜在空间中的不同领域,这可以进一步用于增强VLAD词汇构建,从而提升性能。从下图可以看出在室外数据中表现出较好的性能,代码已经开源,可以在HF中进行效果测试。

2、SelaVPR:Towards Seamless Adaptation of Pre-trained Models for Visual Place Recognition
文章主要考虑预训练模型产生的图像表示易受动态对象影响,并且倾向于忽略一些静态的区分性背景(例如建筑物和植被),因此基础模型没办法直接用于VPR任务,完全微调的话又会产生灾难性遗忘问题。SelaVPR主要通过向冻结的预训练模型添加一些可调节的轻量级适配器,实现全局-局部混合适应,既可以获取用于检索候选地点的全局特征,又可以获取用于重新排序的局部特征。

全局适应主要是通过在每个Transformer块的多头注意力层后添加适配器并与MLP层并行实现的。局部适应通过在整个Transformer主干后添加上卷积层来实现以对特征图进行上采样。此外,论文提出了最近邻局部特征损失,可以与常用的三元组损失结合使用来优化网络。SelaVPR消除了在重排中依赖耗时的空间验证,因此它仅耗费了RANSAC-based两阶段方法的3%检索时间 。
视觉导航决策
Bridging Zero-shot Object Navigation and Foundation Models through Pixel-Guided Navigation Skill
大多数方法采用基于建图的方法实现开放词域物品导航,但是由于现有的大模型并不能直接理解地图形式的输入,此类方法往往有选择性的将地图某些区域翻译成文字,进而发挥出大模型的常识理解与推理能力。在这一过程中,从原始 RGB 观测-建图-文字损失大量的细节信息,不利于大模型实现更精准的规划。为了克服这类方法的问题,本文跳出基于建图的框架,提出了一种通用的 RGB 导航技能 PixelNav,此技能以指定像素位置作为导航目标,建立端到端网络学习从当前位置到像素目标对应坐标的移动轨迹。PixelNav 可无缝衔接多模态大模型的能力,实现任意类别物体的导航过程。

总结
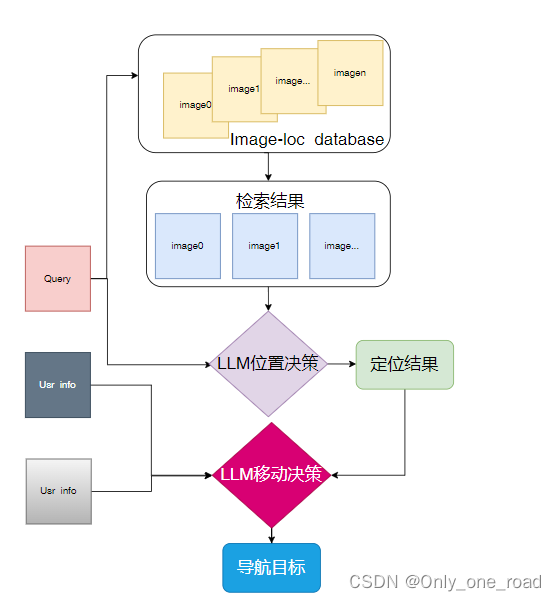
对于视觉位置识别,个人认为全局+局部特征提取的方法会更好一些,经过检索定位可以借助多模态模型去做精排,主要是针对静态物体做细粒度筛选确定定位结果。定位的结果与用户指令相结合确定机器人移动导航的目标,进而为机器人移动规划提供有利的支持。整个的思路如下:
以上是个人的一些想法,欢迎感兴趣的评论交流。
参考
1、https://arxiv.org/pdf/2308.00688.pdf
2、https://github.com/Lu-Feng/SelaVPR