- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
该函数用于构建一个透视变换(Perspective Transform)的映射表(xmap / ymap),可用于后续的图像重映射操作(如 remap)。
适用于 GPU 加速的图像处理流程,是 cv::warpPerspective 的底层实现之一。
函数原型
void cv::cuda::buildWarpPerspectiveMaps
(
InputArray M,
bool inverse,
Size dsize,
OutputArray xmap,
OutputArray ymap,
Stream & stream = Stream::Null()
)
参数
| 参数名 | 类型与说明 |
|---|---|
M |
一个 3x3 的 Mat 或 UMat 类型的变换矩阵。 |
inverse |
标志位,指定 M 是一个逆变换(即从目标图像到源图像的映射)。 |
dsize |
目标图像的尺寸。 |
xmap |
X 坐标的映射值,类型为 CV_32FC1。 |
ymap |
Y 坐标的映射值,类型为 CV_32FC1。 |
stream |
用于异步操作的流对象,默认为 Stream::Null()。 |
代码示例
#include <opencv2/cudaimgproc.hpp>
#include <opencv2/cudawarping.hpp>
#include <opencv2/opencv.hpp>
int main()
{
// 读取图像
cv::Mat h_src = cv::imread( "/media/dingxin/data/study/OpenCV/sources/images/Lenna.png", cv::IMREAD_COLOR );
if ( h_src.empty() )
{
std::cerr << "无法加载图像!" << std::endl;
return -1;
}
// 上传图像到 GPU
cv::cuda::GpuMat d_src, d_dst;
d_src.upload( h_src );
// 定义四个点对(源点和目标点)
cv::Point2f srcQuad[ 4 ], dstQuad[ 4 ];
srcQuad[ 0 ] = cv::Point2f( 0, 0 ); // 左上角
srcQuad[ 1 ] = cv::Point2f( h_src.cols, 0 ); // 右上角
srcQuad[ 2 ] = cv::Point2f( h_src.cols, h_src.rows ); // 右下角
srcQuad[ 3 ] = cv::Point2f( 0, h_src.rows ); // 左下角
dstQuad[ 0 ] = cv::Point2f( 0, 0 );
dstQuad[ 1 ] = cv::Point2f( h_src.cols * 0.9F, h_src.rows * 0.1F );
dstQuad[ 2 ] = cv::Point2f( h_src.cols * 0.8F, h_src.rows * 0.9F );
dstQuad[ 3 ] = cv::Point2f( h_src.cols * 0.1F, h_src.rows );
// 构建透视变换矩阵
cv::Mat M = cv::getPerspectiveTransform( srcQuad, dstQuad );
// 设置输出尺寸
cv::Size dsize( h_src.cols, h_src.rows );
// 创建映射表
cv::cuda::GpuMat d_xmap, d_ymap;
cv::cuda::buildWarpPerspectiveMaps( M, false, dsize, d_xmap, d_ymap );
// 执行图像变形
cv::cuda::remap( d_src, d_dst, d_xmap, d_ymap, cv::INTER_LINEAR );
// 下载结果并显示
cv::Mat h_dst;
d_dst.download( h_dst );
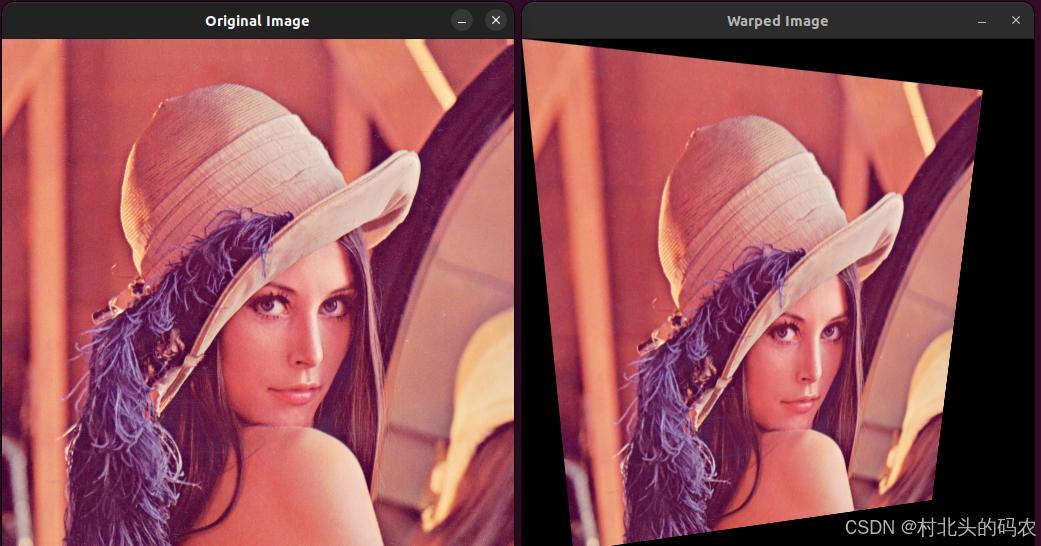
cv::imshow( "Original Image", h_src );
cv::imshow( "Warped Image", h_dst );
cv::waitKey( 0 );
return 0;
}
运行结果