秋招抱佛脚之作,由GPT提供内容大纲。
此博客每日更新,直至博主本人拿到满意的算法offer为止。
目录
(1)线性代数:矩阵乘法、特征值/特征向量、SVD、PCA 原理★★★★★
(2)概率论:条件概率、贝叶斯公式、联合分布、期望/方差★★★★★
(5)优化理论:梯度下降、牛顿法、动量法、Adam、学习率调度★★★★★
(1)经典算法:逻辑回归、SVM、KNN、朴素贝叶斯、决策树★★★★★
集成方法:Random Forest、GBDT、XGBoost、LightGBM★★★★★
模型评估:ROC/AUC、Precision-Recall、F1-score、混淆矩阵★★★★★
特征工程:标准化/归一化、特征交互、降维(PCA、t-SNE)★★★★☆
超参数搜索:网格搜索、随机搜索、Bayesian Optimization ★★★★☆
CNN:卷积/池化、padding、stride、感受野★★★★★
Transformer 架构:多头注意力、位置编码、残差连接★★★★★
激活函数对比:ReLU、LeakyReLU、GELU、SiLU★★★★☆
优化技巧:梯度裁剪、学习率 warmup、Lookahead★★★☆☆
正则化方法:Dropout、Weight Decay、Label Smoothing★★★★☆
Python 数据处理:Numpy/Pandas 熟练度★★★★★
PyTorch 基础:Dataset、Dataloader、Module、Optimizer★★★★★
模型部署:ONNX、TensorRT、TorchScript★★★★☆
1. 数学与概率统计
(1)线性代数:矩阵乘法、特征值/特征向量、SVD、PCA 原理★★★★★
矩阵乘法:
如图,矩阵,
相乘,可得到矩阵
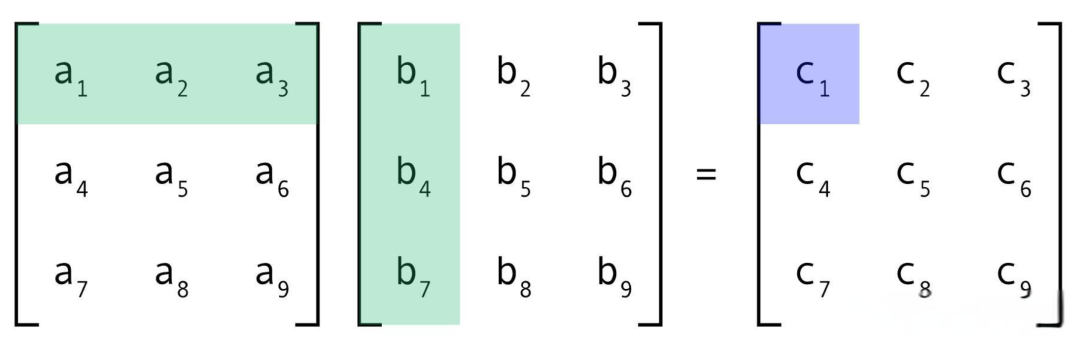
C矩阵中c1的计算:
普遍地,结果矩阵 C 第 i 行第 j 列元素 = 左矩阵A的第 i 行元素逐个乘右矩阵 B 第 j 列的元素的结果之和。
关于矩阵乘法的本质,可以理解为是一系列线性变换的复合,具体可参考此视频:
3Blue1Brown:线性代数的本质 - 04 - 矩阵乘法与线性变换复合
特征值/特征向量:
数学上定义,当 时,
是
的特征向量,
是
的特征值(
是一常数)。
我们来通俗地理解一下。由于上面我们说到了矩阵乘向量的本质是对向量进行线性变换,而几何上,线性变换可能对向量进行旋转、缩放、剪切等操作,那么有:
- 特征向量:在变换中方向不变的向量(仅被拉伸或压缩)。
- 特征值:对应的缩放因子
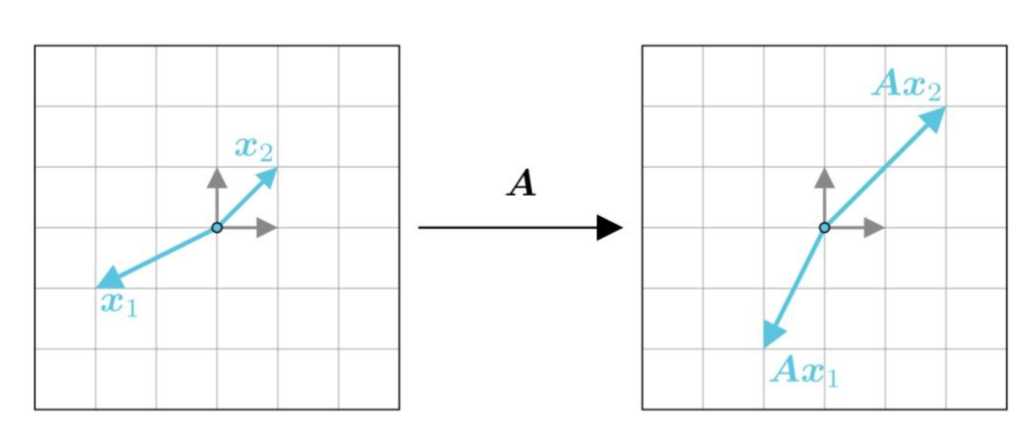
举个例子,在上图中,向量经过变换
之后方向不变,只是长度增加,故
是
的特征向量,特征值则是2。
SVD 奇异值分解:
此处参考 知乎链接
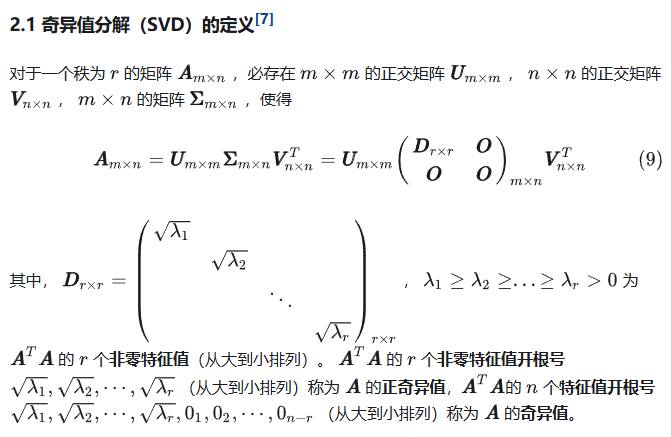
奇异值分解是 LoRA微调的理论基础。正因为矩阵可以分解为,后续才可以用
和
两个参数量显著减小的矩阵,对网络参数进行更新,得到接近全量更新的结果。
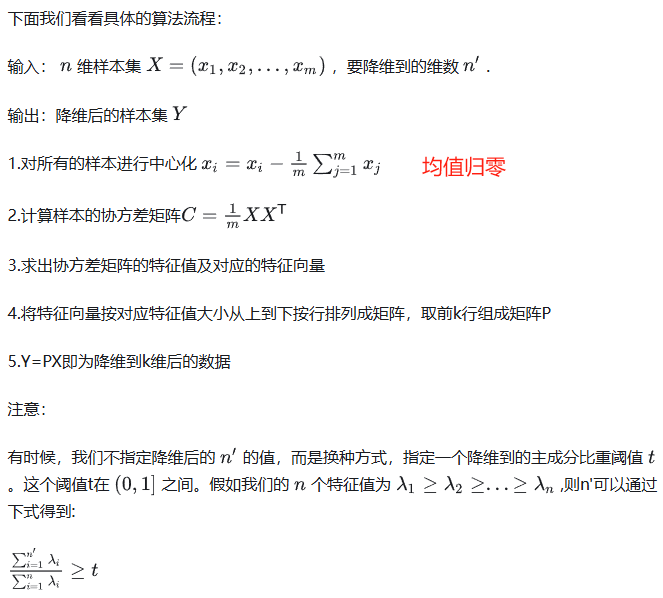
PCA(priority component analysis)主成分分析:
对高维数据进行降维
协方差与协方差矩阵:
111
PCA算法流程:
参考链接 知乎 - 主成分分析
(2)概率论:条件概率、贝叶斯公式、联合分布、期望/方差★★★★★
条件概率:
贝叶斯公式:
联合分布:
期望:对数据取值和取值概率相乘并进行求和。
方差:可用来衡量数据分布散度。方差越小,数据分布越集中。
(3)最大似然估计与最大后验估计★★★★★
似然:
我们常用概率(Probability) 来描述一个事件发生的可能性。
而似然性(Likelihood) 正好反过来,意思是一个事件实际已经发生了,反推在什么参数条件下,这个事件发生的概率最大。
用数学公式来表达上述意思,就是:
- 已知参数 β 前提下,预测某事件 x 发生的条件概率为
;
- 已知某个已发生的事件 x,未知参数 β 的似然函数为
;
- 上面两个值相等 ( 为什么?),即:
。
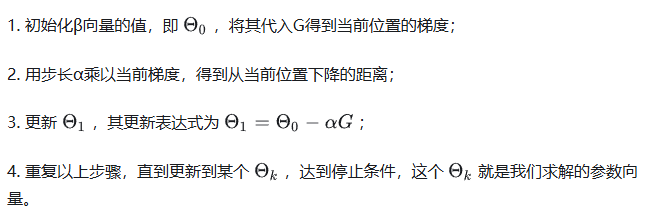
一个参数 β 对应一个似然函数的值,当 β 发生变化,也会随之变化。当我们在取得某个参数的时候,似然函数的值到达了最大值,说明在这个参数下最有可能发生x事件,即这个参数最合理。
最大似然估计(MLE):求β在取什么值的时候,L(β)能达到最大值
参考链接: 知乎 - 用人话讲明白梯度下降
最大后验估计(MAP):
参考链接: 知乎 - 究竟什么是最大后验估计
(4)信息论:熵、交叉熵、KL散度、互信息★★★★☆
(5)优化理论:梯度下降、牛顿法、动量法、Adam、学习率调度★★★★★
梯度下降:
牛顿法:
动量法:
Adam:
(6)凸优化与约束优化基础★★★☆☆
高数基础:偏导数链式法则、泰勒展开★★★☆☆
2. 机器学习基础
(1)经典算法:逻辑回归、SVM、KNN、朴素贝叶斯、决策树★★★★★
逻辑回归:
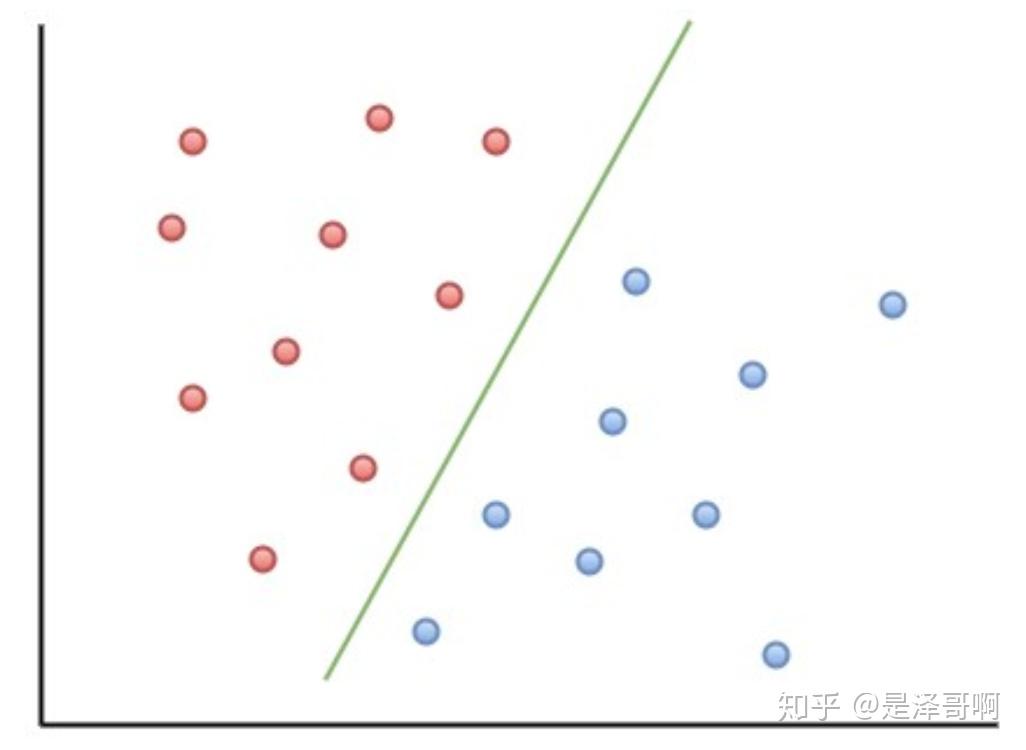
SVM(support Vector Machine):试图找到使得各类样本点到超平面距离最远的,即最大间隔的超平面。
首先,我们需要知道,在二维空间上,两类点被一条直线完全分开叫做线性可分(如图所示)。
严格的数学定义是:

从二维扩展到多维空间中时, 将 和
完全正确地划分开的
(二维空间中区分开两种类型的点的那条直线) 就成了一个超平面。
为了使这个超平面更具鲁棒性,我们会去找最佳超平面,以最大间隔把两类样本分开的超平面,也称之为最大间隔超平面,具有以下性质:
- 两类样本分别分割在该超平面的两侧;
- 两侧距离超平面最近的样本点到超平面的距离被最大化了。
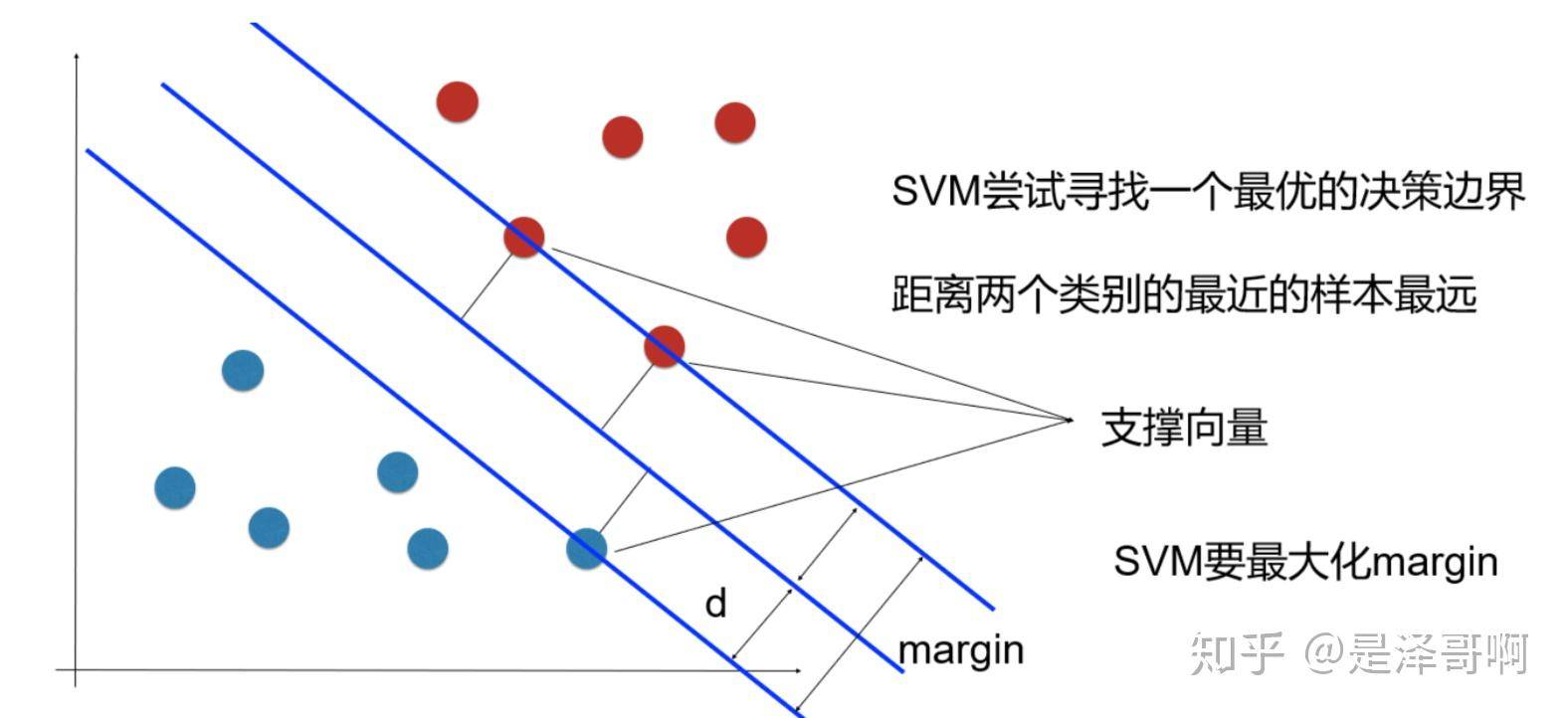
样本中距离超平面最近的一些点,叫做支持向量。
参考链接:知乎 - 支持向量机
KNN(K-nearest neighbours):K最邻近算法,选取已知类别的数据中和当前数据 x 距离最近的 K个点,根据这K个点的类别,来判断点 x 所属的类别
集成方法:Random Forest、GBDT、XGBoost、LightGBM★★★★★
模型评估:ROC/AUC、Precision-Recall、F1-score、混淆矩阵★★★★★
Accuracy:
表示模型预测正确的样本数占总样本数的比例。然而,在类别不平衡的数据集中,准确率可能会产生误导。例如,在一个90%样本属于A类,10%样本属于B类的二分类问题中,即使模型始终预测为A类,准确率也有90%,但模型对B类的识别能力为零。
准确率是衡量分类模型性能的基础指标,它表示模型正确预测的样本数占总样本数的比例。在二分类问题中,准确率的计算公式为:
其中,TP代表真正例,TN代表真负例,FP代表假正例,FN代表假负例。
Precision 精确率:衡量模型预测为正类的样本中,实际为正类的比例。
精确率关注的是模型预测为正类别的样本中,真正为正类别的样本的比例。精确率的计算公式为:
精确率越高,说明模型对正类别的识别能力越强,即模型预测为正的样本中,实际为正的比例越高。在信息检索和推荐系统中,精确率是一个重要的指标,因为它直接关系到用户或系统对结果的满意度。精确率高意味着模型在预测正类时错误较少。在医疗诊断中,精确率高的模型可以减少误诊率。
Recall 召回率:
衡量实际为正类的样本中,被模型正确预测为正类的比例。召回率高意味着模型能够识别大多数的正类样本。在疾病筛查中,高召回率可以确保尽可能多的患者被检测出来。
召回率衡量的是所有实际为正样本的样本中,被模型正确预测为正样本的比例。召回率的计算公式为:
ROC/AUC:
参考链接:知乎 - 一文看懂深度学习模型评估
欠拟合与过拟合解决方案:正则化、数据增强、早停★★★★★
欠拟合:模型在当前数据集的拟合不佳,即通常所说的训练未收敛(?),可以理解为模型在当前数据集上的表现不好。
过拟合:模型被过度限制在当前数据集的特征空间,导致对训练集外的数据预测准确率下降,通常由训练轮数过大导致,表现为train loss下降或不变,val loss上升
特征工程:标准化/归一化、特征交互、降维(PCA、t-SNE)★★★★☆
超参数搜索:网格搜索、随机搜索、Bayesian Optimization ★★★★☆
3. 深度学习核心
神经网络基本结构:前向传播/反向传播★★★★★
优化神经网络参数的过程,实际上是找到最佳的网络参数 W ,使输入 X 经过网络的变换得到的 尽可能接近真实值 Y。
那么,前向传播,即是根据网络中上一层结点,计算网络中当前层结点的激活值,直至网络最后一层,计算得到 的过程。
而反向传播,指的是如果当前代价函数(损失函数)值距离预期值较远,那么我们通过调整参数 W 和偏置 b 的值,使新的代价函数值更接近预期值(和预期值相差越大,则w和b调整的幅度就越大)。一直重复该过程,直到最终的代价函数值在误差范围内,则算法停止。
前向传播:
反向传播:
参考链接:CSDN - 前向传播与反向传播
CNN:卷积/池化、padding、stride、感受野★★★★★
卷积:
池化:池化(pooling)的本质,其实就是采样。对于输入的特征图,选择某种方式对其进行降维压缩,以加快运算速度。这词其实是汇聚(到池子里)的意思,疑似当年第一个翻译成池化的人英语不太好。
最大池化(MaxPooling):选择filter内最大值输出到下一层
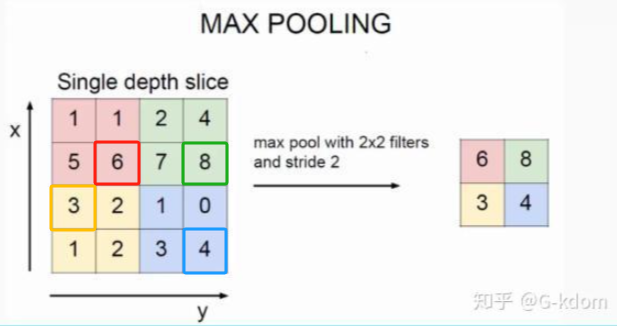
如上图所示,表示的就是对一个 4×4 特征图邻域内的值,用一个 2×2 的filter,步长为2进行‘扫描’,选择最大值输出到下一层,这叫做 Max Pooling。
max pooling常用的 s=2 , f=2 的效果:特征图高度、宽度减半,通道数不变。
【池化层没有参数、池化层没有参数、池化层没有参数】
池化的作用:
(1)保留主要特征的同时减少参数和计算量,防止过拟合。
(2)invariance(不变性),这种不变性包括translation(平移),rotation(旋转),scale(尺度)。
Pooling 层说到底还是一个特征选择,信息过滤的过程。也就是说我们损失了一部分信息,这是一个和计算性能的一个妥协。
参考链接:知乎 - 池化
padding(填充):指的是在进行卷积操作时,对输入进行边缘填充,以控制输出特征图的大小和形状。
常见的padding方式有:
stride(步长):滑动卷积核时,我们会先从输入的左上角开始,每次往右左滑动一列或者往下滑动一行逐一计算输出,我们将每次滑动的行数或列数称为Stride。
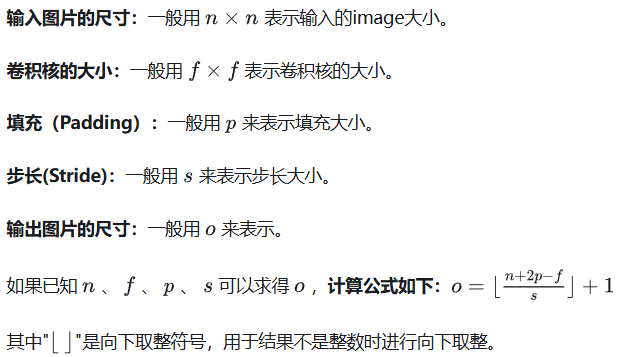
感受野:
指卷积神经网络每一层输出的特征图(feature map)上每个像素点映射回输入图像上的区域大小。
神经元感受野的范围越大表示其能接触到的原始图像范围就越大,也意味着它能学习更为全局,语义层次更高的特征信息;相反,范围越小则表示其所包含的特征越趋向局部和细节。因此感受野的范围可以用来大致判断每一层的抽象层次。并且我们可以很明显地知道网络越深,神经元的感受野越大。
由此可知,深度卷积神经网络中靠前的层感受野较小,提取到的是图像的纹理、边缘等局部的、通用的特征;靠后的层由于感受野较大,提取到的是图像更深层次、更具象的特征。
因此在迁移学习(模型微调)中常常会将靠前的层的参数冻结(不参与训练,因为他们在迁移到新的场景之前已经具备了提取通用特征的能力),来节省训练的时间和算力消耗。
参考链接:知乎 - CNN基础知识
RNN / LSTM / GRU:序列建模原理★★★★☆
RNN:循环神经网络。 t 时的输出 由 t 时刻的输入 x_t 和 t-1 时的隐藏状态决定
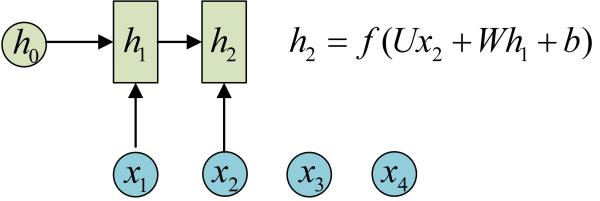
为什么叫“循环”神经网络嘞?因为它还可以表示成这样:
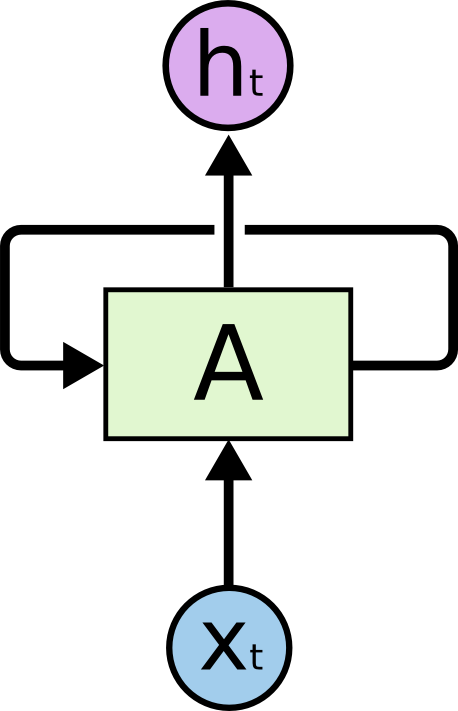
在这个结构中,每个神经网络的模块,读取某个输入
和上一时间步的隐藏状态
,并输出一个值
。“循环”之处在于,每个
都经过 共享的 模块
,产生下一个隐藏状态,再次输入模块
。
LSTM(Long-short term memory):长短时记忆网络
RNN 的结构如此清晰明了,看上去天然适用于序列类输入(例如文本或音频),然而实际上, 在递归神经网络中,获得小梯度更新的层会停止学习—— 那些通常是较早的层。
由于这些层不学习,RNN会忘记它在较长序列中以前看到的内容,因此RNN只具有短时记忆,即对于时刻 t ,上一时间步的输入 对当前时刻的输入x_{t} 的影响显然会强于
。如果一条序列足够长,那它们将很难将信息从较早的时间步传送到后面的时间步。
而LSTM——一种RNN特殊的类型,可以学习长期依赖信息。LSTM和基线RNN并没有特别大的结构不同,但是它们用了不同的函数来计算隐状态。
LSTM的“记忆”我们叫做细胞/cells,它的输入为前状态和当前输入x_t。这些“细胞”会决定哪些之前的信息和状态需要保留/记住,而哪些要被抹去。实际的应用中发现,这种方式可以有效地保存很长时间之前的关联信息。
LSTM有通过精心设计的称作为“门”的结构来去除或者增加信息到细胞状态的能力。门是一种让信息选择式通过的方法。他们包含一个sigmoid神经网络层和一个pointwise乘法的非线性操作。
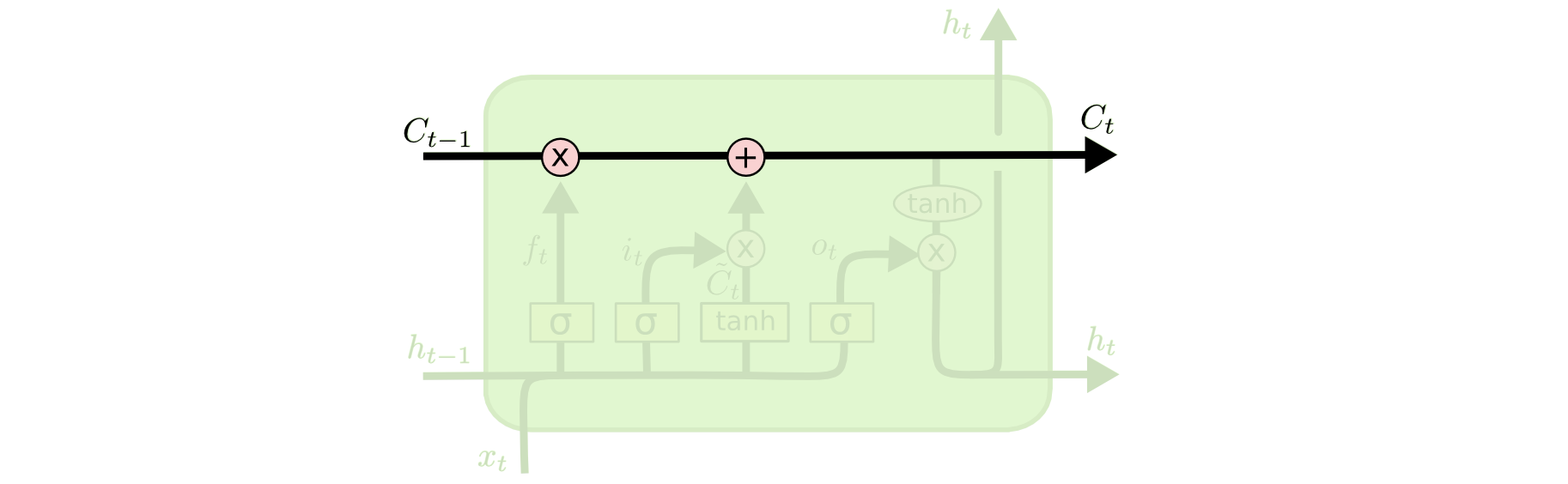
LSTM内部包括三种类型的门结构:遗忘门/忘记门、输入门和输出门,来保护和控制细胞状态。
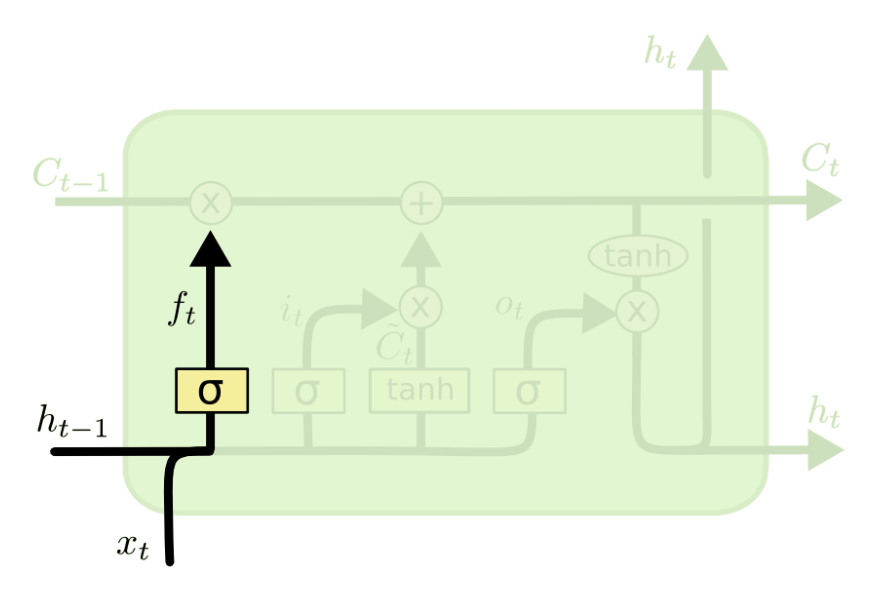 遗忘门:选择性遗忘之前的内容‘
遗忘门:选择性遗忘之前的内容‘![]()
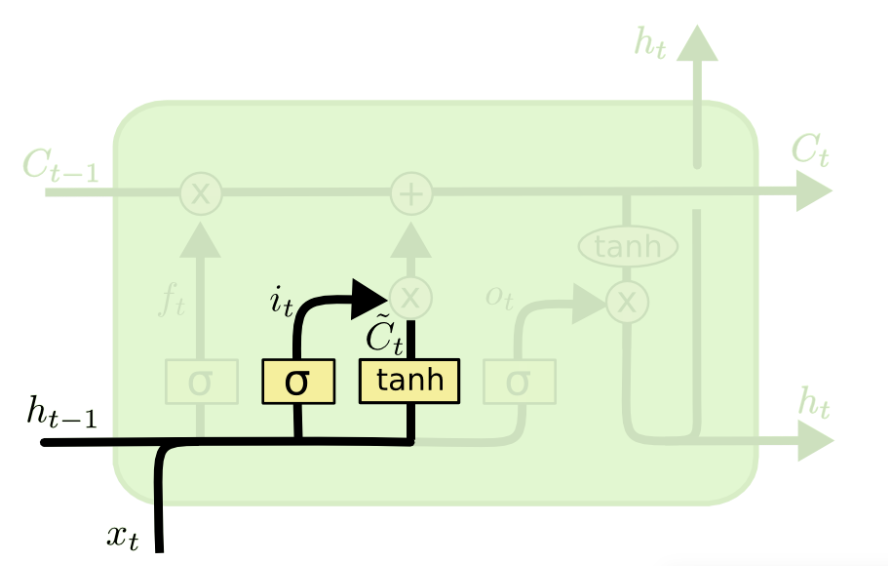 记忆门:决定保留哪些内容
记忆门:决定保留哪些内容
这里包含两个部分:
- 第一,sigmoid层称“输入门层”决定我们要更新什么值;
- 第二,一个tanh层创建一个新的候选值向量
,会被加入到状态中
其中 ,
,
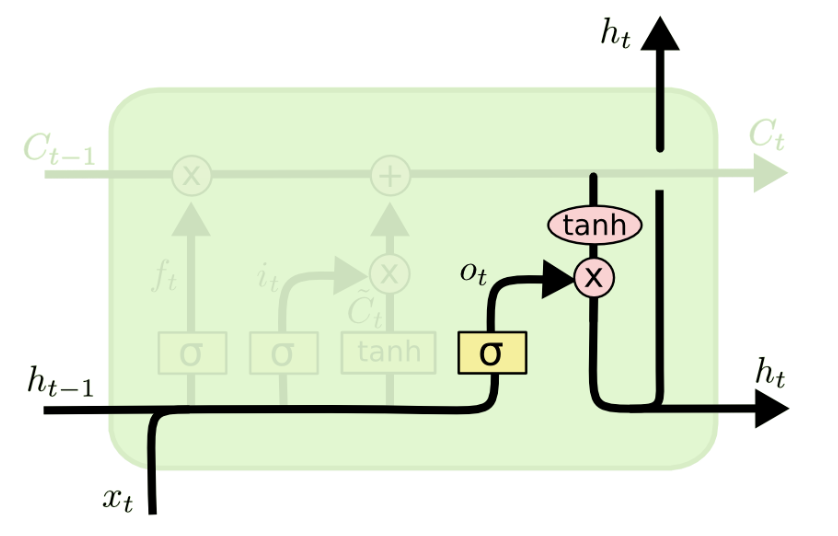 输出门:在当前时间步细胞状态
输出门:在当前时间步细胞状态 的参与下(注意!这里不是上一时间步的细胞状态,因为其已经和通过遗忘门、记忆门的运算结果进行了运算),根据前一时间步隐藏状态
和当前时间步输入
得到新的隐藏状态。
你可以理解为循环神经网络的输出本质上是时刻 t 的隐藏状态。
更新细胞状态(仅用到遗忘门和输入门,放在这里是为了将三个门先介绍清楚):
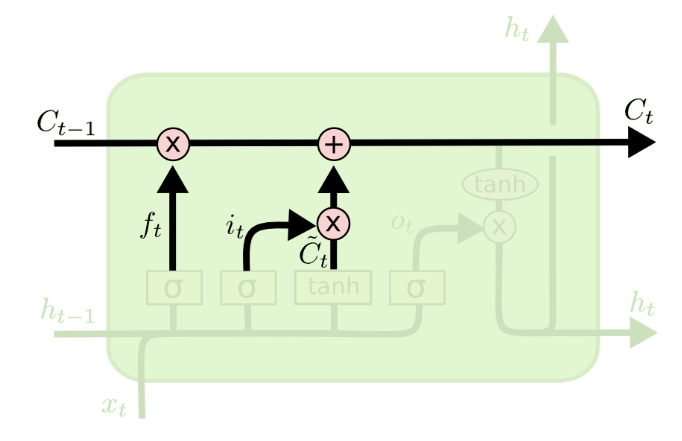 细胞状态与遗忘门的输出相乘,决定忘记哪些内容;
细胞状态与遗忘门的输出相乘,决定忘记哪些内容;
![]() 然后与输入门的输入相加,决定记住哪些新内容。
然后与输入门的输入相加,决定记住哪些新内容。
GRU (Gated Recurrent Unit) 门控循环单元:

将LSTM的忘记门和输入门合成了一个单一的更新门,同时还混合了细胞状态和隐藏状态。
为了便于理解,把上图右侧中的前三个公式展开一下

![]()

这里面有个小问题,r_t 和 z_t 都是对 、
做的Sigmoid非线性映射,那区别在哪呢?原因在于GRU把忘记门和输入门合二为一了,而 z_t 是属于要记住的,反过来 1-z_t 则是属于忘记的,相当于对输入
、
做了一些更改/变化,而 r_t 则相当于先见之明的把输入、在 z_t / 1-z_t 对其做更改/变化之前,先事先存一份原始的,最终在 h_t 那做一个tanh变化。
参考链接:CSDN - 长短时记忆网络
Transformer 架构:多头注意力、位置编码、残差连接★★★★★
残差网络、DenseNet 与梯度流问题★★★★★
归一化技术:BN vs LN vs GN★★★★★
激活函数对比:ReLU、LeakyReLU、GELU、SiLU★★★★☆
优化技巧:梯度裁剪、学习率 warmup、Lookahead★★★☆☆
正则化方法:Dropout、Weight Decay、Label Smoothing★★★★☆
1
4. 工程与部署能力
Python 数据处理:Numpy/Pandas 熟练度★★★★★
PyTorch 基础:Dataset、Dataloader、Module、Optimizer★★★★★
模型保存与加载、Checkpoint 管理★★★★★
GPU 加速与显存优化(混合精度、梯度累积)★★★★☆
模型部署:ONNX、TensorRT、TorchScript★★★★☆
Linux/Git/Docker 基础★★★☆☆